
Fターム[3C007MS05]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375)
Fターム[3C007MS05]の下位に属するFターム
危険領域(作動領域)内への異物進入検知 (24)
接触検知又は接近検知を行うもの (94)
干渉の予測 (172)
動作領域の制限 (46)
Fターム[3C007MS05]に分類される特許
21 - 39 / 39
制御システムおよび制御方法
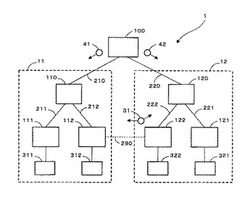
【課題】通信経路に障害が生じても、適切に危険な状態を回避できる制御システムを提供する。
【解決手段】制御ユニットが階層構造に構成された制御システムにおいて、階層構造とは別に非常状態を他の制御ユニットに通知するための非常通信経路を設けることによって、階層構造の通信障害に対しても適切に危険な状態を回避できる制御システムを構成する。さらに、各制御ユニットは所定の時間が経過すると、あらかじめ決められた動作を行うことによっても危険な状態を回避できる。
(もっと読む)
関節を制御する方法及びトルク速度変換装置

【課題】位置制御ハードウエアを用いた従来の位置制御されたシステム上でコンプライアンスオープンループトルク制御を実現する。
【解決手段】ロボットの関節がトルク命令によって制御される。関節は、位置フィードバックループを有する位置制御装置を有する。関節のトルク命令が受け取られ、位置制御装置を使用してトルク命令を実現するために速度フィードフォワード命令が決定される。速度フィードフォワード命令は位置制御装置に送られ、位置フィードバックループは打消される。位置フィードバックループは、関節の実測された位置である位置命令を位置制御装置に送ることによって打消される。位置フィードバックループは、位置フィードバックループのゲインをゼロに設定することによっても打消される。
(もっと読む)
ロボット
【課題】ロボット自身の存在や動き出すタイミング、ロボットの動作範囲を周囲の人間に知らしめることにより、注意を喚起したり、衝突を回避するための退避を人間に促すことができるロボットを提供する。
【解決手段】
ロボットの本体表面または搭載するロボットアームの表面に空気の吹き出し口を設け、ロボット本体やロボットアームが動作する直前や動作中に、ロボット本体表面あるいはロボットアーム表面の空気吹き出し口から空気を吹き出すことにより、ロボットの存在や動き出すタイミング、動作範囲を周囲に存在する人間に感知させる。
(もっと読む)
音響再生ロボット
【課題】ユーザの個性や嗜好性に対応して出力する音響に基づいて駆動機構を制御する音響再生ロボットを提供する。
【解決手段】出力する音響データ列からジャンルを解析するジャンル解析部36と、駆動機構11で実現される複数の行動パターンのデータを格納する行動パターンデータ格納部15と、出力する音響データ列を順次蓄積するバッファー処理部34と、バッファー処理部34に蓄積した音響データ列からテンポ及び/又はピークを含む音響に関する特徴量を抽出する音響解析部35と、ジャンル解析部36のジャンル解析結果に基づいて行動パターンデータ格納部15から取得した行動パターンのデータに基づいて駆動機構11を制御する一方、音響解析部35で抽出した特徴量の入力に応じてこのデータに基づく駆動機構11に対する制御を変化させる駆動機構制御部12と、を備え、出力する音響に合わせて駆動機構11で行動する。
(もっと読む)
地図情報処理装置及び移動ロボット装置
【課題】移動ロボットが移動可能領域を算出するための計算コストを軽減させる。
【解決手段】移動体が移動した移動軌跡を取得する移動軌跡取得部と、移動体が移動する床面に上方から投影されたサイズを示す移動体サイズを特定するために前記移動体の大きさに関する情報を取得するサイズ取得部と、移動軌跡と移動体サイズとにより障害物が無いと判断された領域のうち、移動ロボットが移動する床面に上方から投影されたサイズ以上の広い領域を、移動ロボットが移動可能な領域として特定する領域特定部と、を備える。
(もっと読む)
ロボットの制御装置
【課題】ロボットにおける教示のしにくい場面での教示作業の簡易化と、教示位置の確認作業の簡易化を実現する。
【解決手段】複数軸で構成されたロボットの動作を制御する制御装置において、制御装置に接続される教示手段のキー操作によって、現在位置から予め教示された教示位置へロボットを手動動作させる際、前記複数軸のうち予め指定された軸か、教示位置における制御点の位置成分または姿勢成分のうち予め指定された成分を再生するよう構成するとともに、教示作業の際にも、予め指定された軸か、現在位置における制御点の位置成分または姿勢成分のうち、予め指定された成分の登録を許可するように構成した。
(もっと読む)
作業復帰方法及び作業復帰装置
【課題】作業装置の異常停止時の状態に関わらず作業装置を原位置に復帰させることが可能であり、作業装置に精通していない作業者でも容易に対応可能な柔軟性のある作業復帰方法及び作業復帰装置を提供する。
【解決手段】第1ステップでは、作業装置をアシストモードに設定する(第1設定工程)。第2ステップでは、作業者が作業装置を異常停止位置から待避位置へ待避させる(アシスト動作・制御工程)。このとき、作業者の人力の大きさ、方向に応じて作業装置の移動を制御する。第3ステップでは、作業装置を自動復帰モードに設定する(第2設定工程)。第4ステップでは、作業装置を待避位置から原位置に自動復帰させるように制御する(復帰制御工程)。第5ステップでは、作業装置の原位置への復帰が完了する。
(もっと読む)
ワーク格納装置およびワーク格納方法
【課題】簡素な構造でワークパレットの干渉危惧物を自動確認できるようにする。
【解決手段】ロボット3,5が保持したワーク7を格納するワークパレット1は、ワーク投入側の2本の支柱13,15の上部を折りたたみ部13a,15aとして、起立状態の正規位置と後方へ折りたたんだ退避位置とに変位可能で、格納したワーク7の両側を挟むようにして保持する仕切り部材25,27は、水平状態の正規位置と傾斜した退避位置とに変位可能である。折りたたみ部13a,15aの退避位置でのその下方に位置する連結部材21,23の上面に色付け部49,51を、仕切り部材25,27の正規位置での上面に色付け部53,55をそれぞれ設ける。各色付け部49,51,53,55を上方の色検知カメラ57が検知したときに、ロボット3,5やワーク7が折りたたみ部13a,15aや仕切り部材25,27に干渉するとしてワーク格納作業を停止させる。
(もっと読む)
作業装置及びロボットによる作業方法
【課題】本発明は、簡便な構造をもち、低廉な費用で構成可能な作業装置及び作業方法を提供することを課題とする。
【解決手段】保護柵21で囲われ、第1ワーク15及びこの第1ワーク15とは別の第2ワーク18に作業を施すロボット11を中心とする作業装置10において、この作業装置10は、保護柵21に、第2ワーク18を載せ、保護柵21の外からロボット11の動作範囲へ移動させる第2ワーク移動機構19を付設する。第2ワーク移動機構19は、保護柵21に設けられている開口部22を貫通して敷設されたレール42と、このレール42に移動可能に載せられ、開口部22を塞ぐ大きさ及び形状に設定された前壁部44及び後壁部45を備えるトレイ43とからなる。
(もっと読む)
安全システム
【課題】作業者の安全を高い信頼性で確保できる安全システムを提供する。
【解決手段】設置エリア内に設置された工作機械や産業用ロボットなどの機械設備に通電して機械設備を起動するには、通電許可用安全プラグホルダ7の複数の装着部7−1〜7−6に、前記複数の安全プラグ10−1〜10−6の全てが装着されていなければならず、一方、前記設置エリア内に作業者が入るための出入り口の扉のロックを解除するためには、前記複数の安全プラグ10−1〜10−6の少なくともいずれか1個を、ロック解除用安全プラグホルダ6の装着部に装着しなければならず、通電許可用安全プラグホルダ7の複数の安全プラグ10−1〜10−6を抜き忘れて扉のロックを解除することはできないようにしている。
(もっと読む)
ピッキング方法およびピッキングシステム
【課題】準備工数および教示工数などが低減された、汎用性に優れたピッキング方法を提供する。
【解決手段】ピッキング対象部材が収納されている収納部の近傍に設けられた第1の無線端末と、ピッキング対象部材をピッキングするロボットハンドの近傍に設けられた第2の無線端末とからそれぞれ送信される無線信号を受信する受信段階と、第1および第2の無線端末から送信される無線信号の受信結果から、収納部およびロボットハンドの3次元位置を算出する位置算出段階と、算出された収納部およびロボットハンドの3次元位置に基づいて、ロボットハンドを収納部に向かって誘導する誘導段階と、を有する。
(もっと読む)
基板の搬送装置
【課題】 搬送装置が備えた複数の搬送アームの動作の自由度を上げる。
【解決手段】 回転台174に2本の昇降軸172,173が立設され,その各昇降軸172,173に,搬送アーム170,171がそれぞれ取り付けられる。搬送アーム170,171は,ウェハ支持部190とアーム部191から構成され,ウェハ支持部190を水平方向に進退させてウェハWを搬送できる。一方の搬送アームのウェハ支持部190が前方に移動した際に,そのウェハ支持部190の後方側に他方のウェハ支持部190が通過可能な空間ができるように,各搬送アーム170,171は形成されている。これにより,搬送アーム170,171は,相互に上下方向に追い越しできる。また,2つのウェハ支持部190は,櫛状に形成され,ウェハ支持部190相互間でもすれ違うことができる。
(もっと読む)
ロボット制御装置
【課題】 急激な動作を防止することにより、安全性を向上させる。
【解決手段】 制御装置11は、比例ゲインを変更する際、CPU32により、比例ゲインを変更したことにより生じる出力の変化を相殺するように、誤差積分を算出し更新する。制御装置11は出力更新周期が経過すると、誤差、比例ゲインの最新値、積分時間の最新値および誤差積分の最新値を併用して、位置および速度のいずれかの出力値を算出する演算回路40と、出力値を出力する出力端子38とを含む。
(もっと読む)
作業ステーションの安全システム
【課題】生産性を向上させるに際し、作業ステーションエリアを増加しないで作業者の安全を確保することができる安全システムを提供する。
【解決手段】ロボット20の高速移動直前の監視エリア53を示し、監視エリア53を戻り方向Yへ拡張し、監視エリア53内の障害物の不在を確認する。高速移動中の監視エリア53を示し、監視エリア53内に障害物の不在を確認した後、戻り方向Yへ向けて高速移動を実施する。作業者の安全を確保してロボットの高速移動を実施することで、作業ステーションエリアの有効活用をすると共に、生産性の向上を図る。
(もっと読む)
複数ロボットの干渉防止方法およびその方法を実施する装置並びに当該装置を備えるロボットシステム
【課題】 複数ロボットのそれぞれの間における互いの干渉を迅速且つ確実に防止する干渉防止方法、装置、この装置を備えるロボットシステムを提供する。
【解決手段】 少なくとも複数ロボットの対象物に対する作業条件、対象物の形状情報並びに複数ロボットの形状情報および配置情報を設定し、作業条件および対象物の形状情報に基づいて、各ロボットの時系列軌跡データをそれぞれ生成し、各ロボットの時系列軌跡データ並びに各ロボットの形状情報および配置情報に基づいて、各ロボット毎に自ロボットに対する他のロボットの動作開始遅れの最大許容時間差を算出し、各ロボットが動作を開始したことを示す動作開始情報を検出し、動作開始情報に基づいて各ロボット間で自ロボットに対して他のロボットが前記最大許容時間差内に動作を開始したか否かを判定し、その判定結果に基づいて各ロボットに対して動作の停止命令を与える。
(もっと読む)
移動ロボットおよびその追従方法
【課題】安全かつ適切な追従目標物体への追従を実現した追従型移動ロボットを提供する。
【解決手段】速度VTで直線の移動経路LTを移動する追従目標物体1に追従する移動ロボット2において、移動ロボット2の追従経路LRを、追従目標物体1の移動経路LTに対して平行かつ垂直方向に一定量drまたは一定量dlずらした直線状の経路を追従経路LR1または追従経路LR2として設定し、追従経路LR1または追従経路LR2を移動させるように移動制御を行う。
(もっと読む)
ロボット移動制御方法
【課題】 ロボットの移動制御において、所望の動作経路を得るために試行錯誤的に教示内容を調整する作業負担を軽減するとともに、該試行錯誤的調整作業によるサイクルタイムの無用な増加を避ける。
【解決手段】 指定された始点TP4と少なくとも一つの中間点TP5,TP6と終点TP7とを通るように規定される教示経路に基づいて決定された滑らかな経路10,11に沿ってロボットを移動させる。このとき、始点TP4又は中間点の近傍では、ロボットが実際に移動する経路が教示経路と一致することを保証するようにする。
(もっと読む)
経路計画方法
【課題】 本発明の目的は、運動学的及び動力学的に望ましく、動作移動の効率を考慮した経路を計画することが可能な経路計画方法を提供することにある。
【解決手段】 本発明の経路計画方法は、初期位置Sと最終位置G(Gi)との間に中間点Miを確率的に生成させ、中間点Miを用いて初期位置Sから最終位置G(Gi)までの間に経路を計画するものであり、一つの初期位置Sと共に複数の最終位置G(Gi)を予め設定し、初期位置S及び最終位置G(Gi)に対して上述した経路を生成することを特徴としている。(i=1,2,…)
(もっと読む)
基板角度位置補正装置
【課題】構造の複雑化による装置の大型化及び設備コストの上昇、並びに、製造プロセスの長時間化による製造コストの上昇を生じることなく基板の角度位置を制御する。
【解決手段】基板受け渡し部材12が基板把持部1のフィンガ3と干渉する場合には、フィンガ3を含む基板把持部1を基板Wとともにさらに補正角度値だけ回転させ、下限位置から搬出入位置まで上昇する基板受け渡し部材12が基板把持部1のフィンガ3に当接しないようにする。演算処理部8は補正角度値をロボット制御部22に伝送し、ロボット制御部22は演算処理部8から伝送された補正角度値だけ基板把持部1の回転方向とは反対方向にロボットハンド11を水平面内で回転させる。ロボットハンド11における基板Wの相対的な角度は適正なままにされ、その後に基板Wを搬入すべきプロセス装置に対して適正な角度位置で基板Wが搬入される。
(もっと読む)
21 - 39 / 39
[ Back to top ]