
Fターム[3C048DD00]の内容
工作機械の機体 (3,121) | 可動機構 (907)
Fターム[3C048DD00]の下位に属するFターム
1摺動系 (180)
2摺動系 (144)
3摺動系 (122)
1回転系 (212)
2回転系 (70)
3回転系 (4)
1摺動系と1回転系 (17)
リニアモータで駆動されるもの (87)
圧電素子で駆動されるもの (16)
カム、くさびを介して駆動されるもの (18)
Fターム[3C048DD00]に分類される特許
21 - 37 / 37
パラレルメカニズム及びこれを備えた工作機械

【課題】加工時にリンクヘッドにかかる負荷に応じて直動ジョイントの位置が設定可能、あるいは、2つの回転ジョイント間の距離が可変に設定可能なパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301の3自由度の回動及び移動の少なくとも一方の制御が可能なパラレルメカニズム300であって、リンクヘッド301を駆動するための4個のアクチュエータと、これら4個のアクチュエータにそれぞれ接続される4個のリンク350A,350B,351A,351Bを含み、リンクヘッド301に接続されるリンク集合体350,351とを備え、回転ジョイント354と回転ジョイント355との距離を変更して設定できるようにした。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械

【課題】構成部品の破損等の発生を防止することと、リンクヘッドの移動・回動動作として所望の移動・回動動作を得ることと、機構全体の小型化を図ることとを可能としたパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301の3自由度の回動及び移動の少なくとも一方の制御が可能なパラレルメカニズム300であって、リンクヘッド301を駆動するための4個のアクチュエータと、これら4個のアクチュエータにそれぞれ接続される4個のリンク350A,350B,351A,351Bを含み、リンクヘッド301に接続されるリンク集合体350,351とを備え、これらリンク集合体350,351とリンクヘッド301との間に介在する回転ジョイント355を、リンクヘッド301に対して一軸線方向に可撓性を有する弾性ヒンジを有して形成された直動ジョイント370により接続する構成とした。
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】構成部品の破損等の発生を防止しつつ、リンク相互間の干渉がなく可動範囲が大きく、また、リンクヘッドの剛性が大きいパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301を上面部及び下面部に配設された回転ジョイント355に回転可能に接続されたリンク集合体351により、直動ジョイント353を介して、上下方向から両持ちで支持し、また、リンクヘッド301を上面部及び下面部に配設された回転ジョイント354に回転可能に接続されたリンク集合体350により、上下方向から両持ちで支持する構成とした。
(もっと読む)
位置決め基台
【課題】支持部材に対する引き抜き及び、転倒モーメントに対する拘束力や抗力があり、外部からの振動により位置精度が損なわれるのを抑制する。
【解決手段】テーブル2と、固定板3とが、3つの連結機構4a〜4cによって連結されている。連結機構4a〜4cが、テーブル2に固定されたテーブル側シャフト11a、11bと同心に回転自在に接続されているとともに、固定板3に固定された固定側シャフト12a〜12cと偏心した状態で回転自在に接続された連結部材31a〜31cを有している。テーブル側シャフト11a及び固定側シャフト12a〜12cは互いに平行になっており、連結部材31b及び連結部材31cが互いに平行となっていない。
(もっと読む)
パーソナルアフェクターマシーン
本発明は、概してマシーンに関し、より具体的には、パーソナルアフェクターマシーンを提供するためのシステムおよび方法に関する。一実施形態において、本発明は、上面フレーム、横断部材(横断部材は、上面フレームから延び、上面フレームに対して並進および回転のうちの任意の運動をするように構成可能である)、アフェクターヘッド(アフェクターヘッドは、横断部材に結合され、上面フレームに対して並進、回転および旋回のうちの任意の運動をするように構成可能であり、アフェクターを有する)、底面フレーム(底面フレームは、上面フレームに結合されている)、およびカセット(カセットは、その中に材料を取り外し可能に固定するように構成可能であり、底面フレームに取り外し可能に装着可能である)を含み、アフェクターは、カセットの中の材料を複数の次元においてアフェクトするように構成可能である。  (もっと読む)
(もっと読む)
天井固定部品の機械加工手段
【課題】本発明は、少なくとも3つの並進軸X、Y、Zにおいて変位可能な工作ヘッド(10)からなる工作装置に関し、工作ヘッド(10)上方に固定された静止状態のパーツを機械加工するためのものである。
【解決手段】前記工作ヘッドは、少なくとも3つの関着連結ロッド(31a、32a、31b、32b)によって一定の向きに保たれている。2つの連結ロッド(31a、32a)は、工作ヘッドと、それらが関着された第1のY往復台(33a)と共に、XZ平面において変形可能な関着平行四辺形を規定する。他の連結ロッド(31b)は、工作ヘッド(10)および第2のY往復台(33b)に関着されている。第1のY往復台(33a)は、Xに沿って変位可能な第1のX往復台(20a)の上で、Yに沿って変位可能であり、第2のY往復台(33b)は、Xに沿って変位可能な第2のX往復台(20b)の上で、Yに沿って変位可能である。X往復台のXに沿っての相対運動は、Z方向への変位をもたらす。複数の装置を複数のトンネル(40)内に配置可能であり、前記トンネルは複数の手段(107、108、109)を共有するように配置される。
(もっと読む)
座標位置決め機械
座標位置決め装置は、ベース(12)と、構造体(14)と、ベースおよび構造体を結合する6つの支柱(22,24,26,28,30,32)を有する。ベース、構造体および6つの支柱によって作動空間が画成される。支持構造体からは支持部材(16)が延在している。作動空間内への少なくとも1つのアクセス領域が設けられ、そのアクセス範囲は隣接する2つの支柱(22,32)により形成され、アクセス領域の範囲は他の隣接する支柱のセット間の範囲よりも大である。これにより作動空間へのアクセスが改善される。  (もっと読む)
(もっと読む)
空間3自由度パラレル機構の制御方法および空間3自由度パラレル機構
【課題】簡易な機構で本質的に剛性が高く、可動体(主軸頭)の旋回角度可動範囲が広く、位置決めの絶対精度が本質的に高く、機構パラメータの校正が行い易く、制御性が良く、動作速度や軌跡精度が高い空間3自由度パラレル機構を提供する。
【解決手段】主軸頭30を第1及び第2の可動サポート体23、25により、Z,A、B軸で移動自在に支承する。そして静止系に固定された3本の直線ガイド21上を移動する駆動スライダ33、33、33と主軸頭30を3本のロッド35、35、35で連結する。連結には球面ジョイント36、ユニバーサルジョイント37が用いられる。適宜採取された逆変換指令位置および逆変換実測位置に基づいて機構パラメータが最新のものに補正される。
(もっと読む)
誘導装置
【課題】機械工具または機械工具ユニットを案内するための案内装置(1)を与える。
【解決手段】本発明は、装置は第1の本体(10)および第2の本体(12)を有し、本のうちの1つ(12)は機械工具または機械工具ユニット(2)がそこに取付けられたまま運動を実行するよう設計される。案内装置(1)はさらに少なくとも1つの結合要素(20)を有し、結合要素は、第1の本体(10)と第2の本体(12)との間の引張力を転送することができるように前記本体を結合し、前記装置は少なくとも2つの支持要素(30,32)を有し、それらは第1の本体(10)と第2の本体(12)との間の圧縮力を転送することができるように前記本体上の支持部でヒンジ係合される。
(もっと読む)
位置決め装置
本発明は、位置決め装置に係り、この位置決め装置は、支持構造を備え、ワーク・キャリア(22)を備え、長さ調整の可能な支柱(70,72;186)を備えていて、それらの支柱は、一方のサイドで支持構造に、もう一方のサイドでワーク・キャリア(22)に、それぞれ接続されている。前記支柱(70,72,186)は、支持構造及びワーク・キャリア(22)への接続のポイントに、可動状態で取付けられ、前記支柱(70,72,186)の少なくとも一部は、長さの調整が可能であり、前記支柱(70,72,186)の少なくとも一部は、それらの長さを調整するための駆動源を有している。前記支柱(70,72,186)の内の少なくとも6本は、対を成して配置されている。各一対の支柱(58,60,62;126)に関して、それらの支柱(70,72,186)は、平行に配置され、支柱の各対(58,60,62;126)は、支柱(70,72,186)の長手方向の範囲の第一の端部に、ピボット軸受(24,26,30,32;78,80;84)を有している。最後に、支柱の各対(58,60,62;126)はまた、各支柱(70,72)の長手方向の範囲の第二の端部に、第二の軸受を有している(図3)。 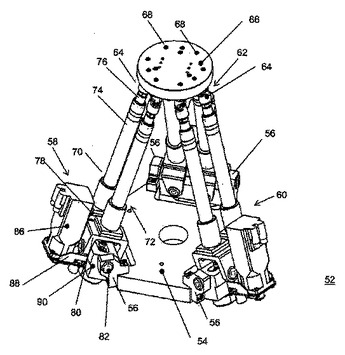 (もっと読む)
(もっと読む)
パラレルメカニズム及びこれを備えた工作機械
【課題】構成部品の破損等の発生を防止することと、リンクヘッドの移動・回動動作として所望の移動・回動動作を得ることと、機構全体の小型化を図ることとを可能としたパラレルメカニズム及びこれを備えた工作機械を提供する。
【解決手段】リンクヘッド301の3自由度の回動及び移動の少なくとも一方の制御が可能なパラレルメカニズム300であって、リンクヘッド301を駆動するための4個のアクチュエータと、これら4個のアクチュエータにそれぞれ接続される4個のリンク350A,350B,351A,351Bを含み、リンクヘッド301に接続されるリンク集合体350,351とを備え、これらリンク集合体350,351とリンクヘッド301との間に介在する回転ジョイント355をリンクヘッド301に対して一軸線方向に相対移動可能に接続する直動ジョイント353とした。
(もっと読む)
パラレルメカニズム及びそのキャリブレーション方法
【課題】キャリブレーションの実施に費やす作業時間を短縮すること及び機構パラメータの良好な同定精度を得ることを可能としたパラレルメカニズム及びそのキャリブレーション方法を提供する。
【解決手段】直交座標系で与えられるリンクヘッの回動位置及び移動位置に対応する指令値を機構パラメータに基づいてアクチュエータ356〜359に対する指令値に変換し、アクチュエータ356〜359を制御する制御部3を備え、この制御部3は、リンクヘッドに所定の回動量及び移動量で動作させたときのアクチュエータ356〜359に対する指令値とそのときの検出器380の出力値とに基づいて機構パラメータを補正する。
(もっと読む)
移動ステージ装置
【課題】 X軸方向、Y軸方向のアクチュエータを取り付けた構造全体として、精度よい位置調整を行うことができるようにした移動ステージ装置を提供する。
【解決手段】
ステージテーブル11から分離され、X方向のみに変位することができるとともに、X方向の変位をステージテーブルに伝達することができるX方向主動中間ステージ12に、X方向アクチュエータ37を接続するようにし、同様に、ステージテーブル11から分離され、Y方向のみに変位することができるとともに、Y方向の変位をステージテーブル11に伝達することができるY方向主動中間ステージ14に、Y方向アクチュエータを接続するようにして、X方向アクチュエータ37およびY方向アクチュエータ38がステージテーブルに接続されることに起因して発生するクロストークを回避する。
(もっと読む)
複合加工機及びこれを用いたワークの加工方法
【課題】種々の加工を従来の単一加工機の組み合わせで行なう場合の問題を解決すべく、多品種少量生産にも有効なフレキシビリティのある加工を可能とすると共に、機械設置スペースを生産量等に応じてミニマム化でき、種々の加工が高速かつ高精度にでき、ワーク加工開始から終了までをプロセス一貫して、工程集約して加工可能にする複合加工機及びこれを用いたワークの加工方法を提供することにある。
【解決手段】加工されるワークWを回転的に支持するワーク支持部と、ワークを加工する形状加工ツール、熱処理加工ツール、及び、仕上げ加工ツールから所定の順序で1つの加工ツールを選択し、加工中のワークの外形、加工位置、及び、加工角度に応じた加工姿勢を加工ツールに採らせて1つの加工ツールを支持する加工ツール支持ユニットを備えることにより、複数の加工法でワークの加工が可能な複合加工機1及びこれを用いたワークの加工方法を提供する。
(もっと読む)
加工装置
【課題】 本発明は、研削装置,切削装置等の加工装置に関し、加工点に発生する加工力による加工点の位置の変動を解消することを目的とする。
【解決手段】 被加工物を加工する加工工具を備えた加工手段と、前記被加工物を保持する保持手段と、前記保持手段を前記加工工具側に移動する送り手段と、前記送り手段を前記被加工物側に押圧する押圧手段とを有し、前記押圧手段の押圧位置及び前記被加工物の加工点を結ぶ方向と前記押圧手段の押圧方向がほぼ同じであることを特徴とする。
(もっと読む)
基板上の表面特性を修正するための多要素工具設計
【課題】複数の制御信号に応答して被加工物の表面を修正するための組立体を提供する。
【解決手段】本組立体は、複数の工具と複数の変位機構とを含む。複数の工具は、被加工物の表面を修正するように構成される。複数の変位機構は各々、制御信号の少なくとも1つに応答して工具のそれぞれの1つを被加工物上の実質的に同一の経路に沿って変位させるように配置される。本発明の別の実施形態では、複数の制御信号に応答して被加工物の表面を修正するための組立体が提供される。本組立体は、被加工物の表面を修正するように構成された複数の工具と、複数の変位機構とを含み、各変位機構は、制御信号の少なくとも1つに応答して被加工物上の実質的に同一の経路に沿って工具のそれぞれの1つを変位させるように配置される。
(もっと読む)
パネルの機械加工のためのプロセスおよび装置
本発明はパネル2を機械加工するための方法に関する。前記方法においては、パネル2のいわゆる機械加工面2Tの加工領域50に少なくとも1つの機械加工具11が配置され、また、機械加工面2<SB>T</SB>の反対側にあるパネル2のいわゆる保持面2<SB>M</SB>上に位置し且つパネル2に対して加工領域50の反対側に位置する支持領域52に少なくとも1つの保持部材13が配置されるとともに、機械加工具の移動中に、支持領域52と加工領域50との対向状態を維持するように、パネルの表面に対して接線方向に向かう少なくとも1つの成分を与える動きにしたがって、動作する機械加工具11および保持部材13が協調的な態様でパネル上を移動され、それにより、機械加工面の少なくとも一部が機械加工される。また、本発明は、前記方法を実施するための装置に関する。 (もっと読む)
21 - 37 / 37
[ Back to top ]