
Fターム[3C269AB27]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | その他の作業 (83)
Fターム[3C269AB27]に分類される特許
61 - 80 / 83
関節連結されたコンピューター生成キャラクターからアニマトロニクスユニットを設計するための方法および装置
アニマトロニクスユニットに対する設計を特定する方法は、芸術的に決定された動きを含む動きのデータを受信することと、動きのデータに応答してアニマトロニクスユニットの少なくとも一部分の構成に対する設計を決定することと、アニマトロニクスユニットの構成に対する設計を出力することとを包含する。一実施形態において、アニマトロニクスユニットの挙動を決定する方法は、複数の制御信号を用いてアニマトロニクスユニットの少なくとも一部分のソフトウェアシミュレーションを駆動することによって、複数の制御信号に応答してアニマトロニクスユニットの少なくとも一部分の該挙動を推定することを包含する。  (もっと読む)
(もっと読む)
経路計画器用の加加速度制限軌道計画システムおよび方法

実時間で運動プロファイルを生成するシステムは、プロセッサを含む。このプロセッサは、運動を第1フェーズおよび第2フェーズに分割する。第1フェーズは、運動を定速セグメントに向けて指令することを含み、第2フェーズが、運動が進行中、首尾よく最終状態に到達するために必要となる加加速度値を計算することを含む。このプロセッサはまた、運動プロファイルに基づいて指令信号を送信し、第2フェーズが目標位置に到達するために制御を行わなければならない時点を計算する。このシステムは、運動が制御される装置と、指令信号を受信する少なくとも1つの入出力モジュールとをさらに含む。実時間で運動プロファイルを生成する方法もまた提示されている。 (もっと読む)
食品のスライス用装置
本発明は、選択されたスライス用プログラムに従って食品をスライスする、特に高性能スライシングデバイスであるデバイスに関する。該スライシングデバイスは、プロセスコントロール部と、前記選択されたスライス用プログラムに従って前記デバイス内にまたは前記デバイスに取り付けられるいくつかのコンポーネントとを含む。該コンポーネントはそれぞれ当該コンポーネントを一義的に識別するコードを有し、検出手段が該デバイス内にまたは該デバイスに取り付けられたコンポーネントのコードを検出する。該検出手段は、プロセスコントロール部に接続されており、該プロセスコントロール部は、該コンポーネントが選択されたスライス用プログラムに従って取り付けられたかどうかを検出されたコードから判断することができる。 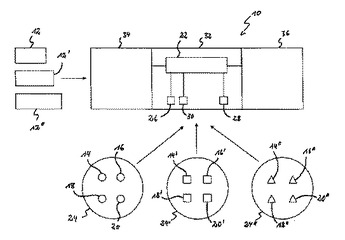 (もっと読む)
(もっと読む)
翼構造体及び翼構造体のリブを製造する方法
翼構造体は、1対の対向する桁要素16、18によって結合されかつ相互に離間される第一及び第二の対向する外板要素12、14を備える。外板要素12、14はそれぞれの外面輪郭及び内面輪郭を有する。外板要素及び桁要素は囲繞空間22を形成し、囲繞空間内部にリブが配列される。リブ24はリブ本体30及び複数のリブ足32を備える。リブ足32は脚部34及びリブ足板36を備える。リブ足板36は、これが当接して配列される外板要素の内面輪郭に合致するようにその寸法、位置及び角度を定められる。 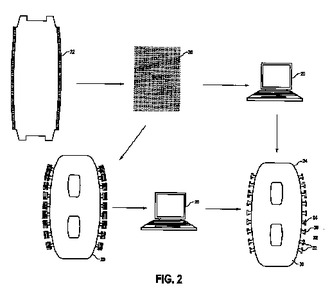 (もっと読む)
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム

本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
フライカッティングシステム及び方法、並びに関連する工具及び物品
工作物をフライカッティングする方法が開示され、この方法において、フライカッティングヘッド又はその関連する切削要素の位置は、時間の関数として既知である。円筒形ロールなどの工作物に、溝又は溝区分などの形状特徴を形成する方法も開示される。形状特徴はまた、1つ以上の開示されるパターンに従って提供され得る。いくつかの有益な特性を呈するポリマーフィルム又はシートなど、記載される方法で機械加工される工具を使用して作製される物品も提供される。  (もっと読む)
(もっと読む)
ピーニング施工装置およびピーニング施工方法
【課題】ワークの外内面側を並行して同時にピーニング施工を行うとき、ワークの外側面に仮設置された外側ピーニング装置を外側面ピーニング施工位置に的確にして、より早く移動させるピーニング施工装置およびピーニング施工方法を提供する。
【解決手段】ワーク1の外側面に外側ピーニング装置3を設け、ワーク1の内側面に内側ピーニング装置2を備える。ワーク1の外側面に仮設置された外側ピーニング装置3は、内側ピーニング装置2の基準位置から内側面ピーニング施工位置までのベクトル情報、仮設置の外側ピーニング装置3の中心から内側面ピーニング施工位置までのベクトル情報、仮設置の外側ピーニング装置3の中心から内側ピーニング装置2の基準位置までベクトル情報、外側ピーニング装置3のピーニング施工開始位置から内側ピーニング装置2の基準位置までのベクトル情報に基づいてピーニング施工開始位置に移動される。
(もっと読む)
同期運転を行う数値制御装置
【課題】複数のサーボモータを連結して同期運転を行なう場合に、各制御軸間での位置差が増大しないようにし連結部に負荷が加わるのを防止する数値制御装置を提供すること。
【解決手段】サーボオン時の各制御軸の移動指令の初速度を、パラメータの設定や実速度の大小関係や速度差から求め、サーボオン後の移動指令の実行に際し、各制御軸間での位置差が増加しないようにする。また、移動指令の初速度を各制御軸の実速度とし、実速度の大小関係から目標対象軸を定め、他の制御軸は指令加速度・減速度により目標対象軸の位置および速度を目標として加減速制御し、サーボオン後の移動指令実行中に各制御軸間での位置差および速度差を徐々に解消し、急激な速度変化を無くし、機械的なショックを抑制する。
(もっと読む)
ウォータージェット方位パラメータの自動化ソフトウェア制御のための方法およびシステム
【課題】流体ジェット方位パラメータの制御を自動化するのに好適な方法およびシステムを提供すること。
【解決手段】流体ジェット方位パラメータの制御を自動化する方法およびシステムが提供される。例示的実施形態は、速度の関数および他のプロセスパラメータとしての、カッティングされる材料に対するジェットの方位を動的に制御するDWCS(401)を提供する。方位パラメータは、例えば、カッティング経路に沿うジェットのx−y位置、およびカッティングヘッドのスタンドオフ補償値、テーパアングルおよびリードアングル等の、ジェットの3次元方位パラメータを含む。
(もっと読む)
大きい部品を製造する方法及びシステム
複合構造を製造する方法及びシステムが提供されている。本方法(400、500、600)は、構造の表面(312)の一部を表すデータを受信し、構造の表面を測定し、測定される表面が、構造が湾曲した状態で測定が行われる受入れ面に対応し、測定面に対応する領域において、第1及び第2方向における測定面と受入れ面との間の差を決定するステップを含む。本方法はまた、第3方向における差を決定し、第1、第2、及び第3方向における決定した差をモーフィングアルゴリズムに送り、構造が公称状態にあるときに、受入れ面上の各ポイントに対応する、湾曲した状態の表面上の一ポイントの第1、第2、及び第3方向における位置を決定するステップも含む。  (もっと読む)
(もっと読む)
プロセッサ制御することにより工作物を加工する装置
【課題】 小型、低コスト、軽量、多機能、および易操作性の特徴を有するプロセッサ制
御に基く彫刻および多目的形削り装置(PCCMPS機)を提供する。
【解決手段】 PCCMPS機(100)は一般に市販されている携帯木材平削り盤およ
びよく知られているレーザ/インクジェット式コンピュータプリンタに部分的に類似した
構成を有し、工作物(112)は水平方向に沿ってPCCMPS機内に挿入される。PC
CMPS機は、取り外し可能な加工刃を駆動し、プロセッサコンピュータ制御に基いて工
作物を穴あけ、切削、形削り、および溝切りするモータ駆動切削ヘッド(114)を備え
ている。切削ヘッドは、工作物がPCCMPS機内に送給されてモータ駆動ローラ(10
7−109)によって移動する方向と直交する方向において、プロセッサ制御に基いて工
作物の表面を横切って前後に直進移動するように構成されるとよい。
(もっと読む)
食品装飾加工システム
【課題】食品の外観を完全に自動的に装飾ができる食品添え食加工システムを提供する。
【解決手段】外部情報2を受け取ってその外部情報2をデジタルファイルに変換する入力装置10と、この入力装置10と接続され、デジタルファイルを処理して移動経路情報にする情報処理装置11と、食材を収納するための貯蔵部120とこの貯蔵部120に連通され食材を送出する加工部121を有する加工装置12と、前記情報処理装置11からの移動経路情報を受け取って前記加工装置12を駆動する駆動装置13とを具備し、前記駆動装置13が貯蔵部120から加工部12に食材を輸送し、加工部12を移動させると同時に食材を送出し、前記食品に絵を描いたり、トリムや装飾を行うようにすることを特徴とする。
(もっと読む)
モーションデータ作成装置、及び、モーションデータ作成方法、並びに、モーションデータ作成プログラム
【課題】モーションプラットフォームの姿勢を制御する装置、並びに、モーションデータ作成プログラムに関し、容易に行えるモーションプラットフォームの姿勢を制御するためのモーションデータを作成できるモーションデータ作成装置、及び、モーションデータ作成方法、並びに、モーションデータ作成プログラムを提供する。
【解決手段】入力装置102の操作に基づいてモーションプラットフォームの姿勢を制御するモーションデータを作成するためのモーションデータ作成装置101であって、モーションプラットフォームの画像を表示装置103に表示させ、モーションプラットフォームの画像が入力装置102により操作されたときに、モーションプラットフォームの画像の姿勢に応じた姿勢データを作成する姿勢データ作成部111と、姿勢データに基づいてモーションデータを作成するモーションデータ作成部112とを有することを特徴とする。
(もっと読む)
機械の制御装置
【課題】重要度が高いアラームに関する情報を長時間確実に記録できるようにする。
【解決手段】アラーム毎にその重要度を設定する。又、アラームの重要度A、B、C毎にアラームに付随するアラームデータを採取して記憶する領域12a、12b、12cを設ける。重要度が高いほどこの記憶領域の容量が大きいものとする。アラーム発生時、アラームデータを採取し、そのアラームに対して設定されている重要度に基づいて、対応する記憶領域に記憶する一番古いデータに代えて記憶する。アラームデータが重要度毎に記憶されるので、重要度の高いアラームの履歴データが重要度の低いアラームの履歴データによって、消されることはない。重要度の高いアラームの履歴データを長時間保存できる。障害発生時には、この記憶したアラーム履歴を表示し、障害原因の解明に役立てる。
(もっと読む)
動きデータ生成装置、動きデータ生成方法及び動きデータ生成プログラム
【課題】音楽の曲調に同期した動きの動きデータを生成する。
【解決手段】所定の動きパターンに応じた動きパターンデータを記憶しておいて、音楽データを分析して当該音楽データに基づく音楽のビートを検出して、当該検出したビートに基づいて音楽データを複数の小節区間に区切ったとき、当該区切った音楽データの小節区間に対して動きパターンデータを割り当てるようにして、動きデータを生成するようにしたことにより、音楽データと共に動きデータを再生するとき、音楽データMD1に基づく音楽を楽譜で表現したときの、小節に対応する第1の小節区間MS1及び第2の小節区間MS2の切り換えに同期させて、動きパターンを切り換えることができ、かくして、音楽の曲調に同期した動きの動きデータを生成し得る。
(もっと読む)
電子カムの制御方法
【課題】 同期制御区間と非同期制御区間の変位点において加速度等がスムーズにつながることができ、振動等が発生しない電子カム制御方法を提供すること
【解決手段】 サーボモータを使用した電子カムの制御方法である。制御対象物を一定速度で移動させるための制御を行なう同期制御区間と、その同期制御区間の終了位置から次の同期制御区間の開始位置まで前記制御対象物を移動させるための制御を行なう非同期制御区間とを有し、前記非同期制御区間における制御が、電子カムの位置制御に5次関数を使用し、電子カムの速度制御に4次間数を使用し、電化カムの加速度制御に3次関数を使用することにより、前記非同期制御区間と前記同期制御区間が切り替わる変化点付近の電子カムの動作を滑らかに制御する。
(もっと読む)
モデル加工方法およびモデル加工システム
【課題】色彩を施したクレイモデルの作製を正確に短時間で行うこと。
【解決手段】このモデル加工システム100は、先端に塗装ヘッド106を備えた多軸アームロボット1と、クレイモデルMのハンドワーク側の形状を取得するカメラ2と、CAD/CAM装置5と、多軸アームロボット1のプログラミング等を行うコンピュータ装置6と、多軸アームロボット1のドライブユニット7とを有する。CAD/CAM装置5は、カメラ2で取得したハンドワークの形状と色とに係わるデータを反転させて、反転着色情報を取得し、この反転着色情報に対応した塗装用の加工パスを生成し、多軸アームロボット1の塗装ヘッド106によりクレイモデルMを塗装する。
(もっと読む)
複合テープコースを規定するコンピュータで実現される方法、複合テープコースを規定するためのコンピュータプログラムプロダクトおよびテープコース生成機
【課題】比較的複雑な表面にテープコース定義を効率的に生成できる方法および装置を提供する。
【解決手段】テープコース生成機はCNC複合テープ積層機械をプログラムする際の使用のためのテープコース定義を生成する。テープコース生成機は外形付きの表面をパラメトリック基準表面にマッピングする基準表面パラメータ化機と、基準表面を基準面にマッピングする基準面インスタンス化機とを含む。テープコース生成機はテープ境界を描くテープ境界プロッタと、テープ境界および層境界を基準面にマッピングする境界マッパーとをさらに含む。さらに、テープコース生成機は層境界とテープ境界との交点を識別する交点ロケータと、テープ切断を規定し、基準面のどの点がテープコース内にあるかを判定するテープコースデリミタとを含む。さらに、テープコース生成機は規定されたテープコースをマッピングして外形付きの表面に戻すテープコーストランスフォーマを含む。
(もっと読む)
マルチヘッド複合材料使用機械を動かすプログラムを作成する方法、マルチヘッド複合材料使用機械をプログラムするためのコンピュータプログラムプロダクト、およびマルチヘッド複合材料使用機械を動かすプログラムを作成するための複合部品プログラムポストプロセッサ
【課題】複合部品プログラムを効率的に作成できる方法および装置を提供する。
【解決手段】コンピュータ数値制御(CNC)マルチヘッド複合材料使用機械とともに使用するための複合部品プログラムを作成する複合部品プログラムポストプロセッサ。ポストプロセッサは定義受信器、ルートデリニエータ、接近および離脱プロファイラ、機械軸解コンピュータおよび出力ファイルコンポーザを含む。定義受信器はたとえば複合部品プログラム生成器から材料使用経路定義を受取る。ルートデリニエータはツールキャリッジおよび製造ツールのルートを描く。さらに、接近および離脱プロファイラは接近および離脱のプロファイルを経路に追加し、機械軸位置コンピュータは機械軸位置を計算して複合材料使用機械を制御しかつ複合材料使用ヘッドを経路に沿って案内する。出力ファイルコンポーザはCNC複合部品プログラムを組合せる。
(もっと読む)
流体ジェット装置のための補償
【課題】
【解決手段】二重輪郭加工物を切削する流体流を位置決めするシステム及び方法は補償モジュール(113)を含み、該補償モジュールは、切削中に、二重輪郭加工物を切削するための少なくとも5つの自由度の輪郭経路、及び流体流の移動速度に関する情報を受取るように構成され、かつ切口補償エラーに基づいて前記少なくとも5つの自由度の修正された輪郭経路を出力として提供するように構成されている。運動制御装置(148)は、前記少なくとも5つの自由度の修正された輪郭経路、及び上記速度を受取るようになされており、かつ制御信号を提供するように構成されている。位置決め装置(104)は、制御信号を受取り、それに応じて加工物に隣接して流体流を位置決めする。  (もっと読む)
(もっと読む)
61 - 80 / 83
[ Back to top ]