
Fターム[3C269MN36]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 帰還信号の確認、分析 (29)
Fターム[3C269MN36]に分類される特許
1 - 20 / 29
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置
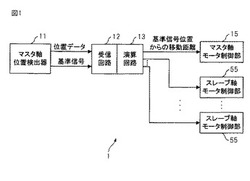
【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
ロボットシステム

【課題】複数のロボットを制御するロボットシステムにおいて、意図するロボットに対して操作機により作業者が正確に動作指示を与えることを可能とする。
【解決手段】ロボットシステムは、ロボットRB1,RB2、RB3と、各ロボットの動作を制御するコントローラ10と、ケーブル11,12,13と、手動操作されることでコントローラ10を通じて各ロボットを動作させるティーチングペンダント20と、各ロボットに関する情報を表示するディスプレイ22と、を備える。コントローラ10は、ケーブル11,12,13を通じて電圧が供給される際の電圧降下量に基づいて、コントローラ10に対する各ロボットの距離である対制御装置距離を算出し、各ロボットの互いの位置関係と対制御装置距離とに基づいて、各ロボット及びコントローラ10の配置であるシステム配置を算出し、システム配置をディスプレイ22に表示させる。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 ブレーカの容量を低減させつつ、ロボットの遮断動作の頻度を低減させることができ、しかも異常原因の検証を容易に行うことができるロボット制御装置を提供する。
【解決手段】 複数のモータ2jの速度をそれぞれ検出する速度検出器10jと、複数のモータ2jに流れる電流をそれぞれ検出する電流検出器9jと、モータ2jの速度ωjおよびモータ2jに流れる電流Ijからロボットの推定消費電力Pを算出する演算器81と、推定消費電力Pがブレーカ4の電流許容値を基準として異常であるか否かを判定する判定器82と、当該判定において推定消費電力Pが異常であると判定された場合に、ロボットをブレーカ4のトリップを回避するよう制御するための制御器83とを備えている。
(もっと読む)
研磨装置
【課題】研磨装置の小型化や省コスト化を可能にし、また、制御の切換によるショックが生じないようにする。
【解決手段】回転速度偏差算出部230が、目標回転速度から、研磨具11の回転速度を減算した回転速度偏差を算出し、制御補正量算出部240が、回転速度偏差に基づいて、前記移動駆動部15の前記研磨具11に対する加力を積分制御するための制御補正量を算出する。また、総合目標位置算出部320が、目標位置から、制御補正量を減算した総合目標位置を算出し、総合位置偏差算出部330が、総合目標位置から実位置を減算した総合位置偏差を算出する。そして、位置制御部340が、総合位置偏差に基づいて、PID制御による制御指令値を算出して、移動駆動部15に出力する。
(もっと読む)
ロボットの制御装置
【課題】鉛直方向を検出することのできるロボットの制御装置を提供する。
【解決手段】ロボット10は、第4軸線J4の方向に延びるとともに、第4軸線J4を中心として回転可能に支持された第2上アーム16Bと、第4軸線J4に直交する第5軸線J5から離れる方向へ延びるとともに、第2上アーム16Bにより第5軸線J5を中心として回転可能に支持された手首部17とを備える。第4軸線J4を中心として第2上アーム16Bを重力により自由回転させ、且つ第5軸線J5を中心として手首部17を重力により自由回転させた場合に、手首部17の先端が指す方向を鉛直方向として検出する。
(もっと読む)
数値制御装置、工作機械の制御方法、及び工作機械の制御プログラム
【課題】ソフトウェアやハードウェアを複雑化することなく、プロセッサの処理のうちの一定割合を安定的かつ確実に周辺機器の制御処理に対して配分する。
【解決手段】サーボ3,4及び周辺機器に係わる複数の動作を制御する数値制御装置であって、プロセッサ13と、システム制御周期タイマ111と、システム制御周期で、プロセッサ13に対し、第1割り込み要求を発生させるシステム制御周期割り込み発生器112と、システム制御周期タイマ111とは異なるサーボ同期周期タイマ122と、サーボ同期周期で、プロセッサ13に対し、第2割り込み要求を発生させるサーボ同期周期割り込み発生器123と、第2割り込み要求の周期を所定の複数の区間に分割するタイマ周期分割器123aと、所定の区間の開始時に、プロセッサ13に対し、周辺機器制御のための第3割り込み要求を発生させるサーボ同期周期割り込み発生器123と、を有する。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
ロボット及びその制御方法
【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
ボール螺子熱変位補正装置
【課題】指令値に対する移動量の誤差を抑えることができるボール螺子熱変位補正装置を提供する。
【解決手段】軸長方向に沿って延びると共に中心軸心P1の回りで回転可能なボール螺子2と、ボール螺子2を回転可能に支持する支持部をもつ固定部と、ボール螺子2に接続され前記ボール螺子2を中心軸心の回りで回転させる駆動部5と、ボール螺子2に係合されボール螺子2の回転に伴い軸長方向に沿って移動する可動部6と、可動部6に保持され可動部6と共に軸長方向に沿って移動する可動側衝突子7と、固定部4において可動部6の前進端側に設けられ、可動部6と共に軸長方向に沿って移動する可動側衝突子7と衝突可能な固定側衝突子8と、可動側衝突子7および固定側衝突子8の衝突に基づく衝突変位量を求め、衝突変位量に基づいて可動部を移動させる補正移動量を設定する制御部9とを有する。
(もっと読む)
位置制御装置
【課題】加工ワーク形状によらず、常に追従誤差が小さい機械を実現できる位置制御装置提供する。
【解決手段】機械の軸移動方向が反転する際に象限反転補償を行う位置制御装置は、数値制御部10、モータ制御部20、モータ30、検出器40を有する。モータ制御部20は、反転を行う軸が前回の反転から今回の反転までに移動した量を算出する反転移動量算出部26と、反転移動量と予め設定された値とを比較し、反転移動量が予め設定された値よりも小さかった場合には、微小反転継続回数の値を増加させ、反転移動量が予め設定された値以上であった場合には、微小反転継続回数の値を減少させる微小反転継続回数算出部27と、微小反転継続回数に応じて象限反転補償量を自動的に調整し、自動調整された補償量をもって象限反転補償を行う象限反転補償部24と、を有する。
(もっと読む)
ワーク寸法計測装置および工作機械
【課題】 ワークの材質および環境温度に応じた、より正確な補正値または補正係数を生成することができるワーク寸法計測装置および工作機械を提供する。
【解決手段】 計測器20と、計測器20で計測された計測値を補正値または補正係数で補正して計測出力値とする計測データ補正手段21とを備え、計測データ補正手段21は、計測器20が設置される環境温度の情報と、ワークWの材質の温度による熱変化量との関係を設定した材質別熱変化量設定手段22と、計測対象のワークWの材質の情報および環境温度の情報を入力する材質・環境温度入力手段23と、材質・環境温度入力手段23で入力されたワークWの材質の情報および環境温度の情報を、材質別熱変化量設定手段22の設定内容に照らして補正値または補正係数を生成する補正値生成手段24とを有する。
(もっと読む)
数値制御装置、数値制御装置用制御プログラム及び数値制御装置用記録媒体
【課題】第1の移動終了位置の方へ早送りする際に余分に惰走させる惰走距離を自動的に決定可能にし且つ汎用性のある制御プログラムにより惰走距離を決定可能にする数値制御装置、この数値制御装置用制御プログラム及び記録媒体を提供することである。
【解決手段】主軸ヘッドをZ軸モータにより各切削動作完了位置から復帰位置の方へ早送りする際に、制御指令に基づく減速開始タイミングになるまで早送りし、その後早送り速度を維持したまま復帰位置まで復帰動作させ、その後Z軸モータを速度零になるまで減速動作させる。前記復帰位置に到達後に、X軸,Y軸モータの少なくとも一方による早送りを実行させ、主軸ヘッドが復帰位置を超えて惰走した惰走距離を演算し、Z軸モータの減速動作による主軸ヘッドの停止後、前記惰走距離の分だけZ軸モータを復帰動作とは逆方向へ動作させる。
(もっと読む)
工作機械の位置測定方法とその装置
【課題】簡素な構成のレーザ光線を有する測定装置で、NC工作機械の3軸方向の位置座標値を同時に検出し、変位値を演算処理して、熱変位等の補正値とする。
【解決手段】回転主軸4とテーブル6との間でX軸、Y軸、Z軸の3軸方向の相対移動を行いワークを加工する工作機械に適用する。テーブル6上にレーザ光線11を照射する発光器12と受光器13を配置する。回転主軸4に端部を円錐形状部とした測定工具8を装着する。ワークの加工前と加工後に、テーブル6と測定工具8との相対移動でレーザ光線11を測定工具8の円錐形状部15に遮断させる。この遮断時にスキップ信号を送出し、位置を検出し演算処理し、X、Y,Zの各軸の加工前と加工後の差を算出し補正値を求める。
(もっと読む)
工作機械の電源制御装置
【課題】工場機械の移転や転売等による移設を確実に検知し、その旨を操作者に報知する。
【解決手段】工作機械1に給電する工場電源電圧の喪失時に、電源制御装置に設けた電源監視部40のコンデンサ45により所定期間、第2リレー42の通電を保持し、工場電源電圧の喪失後、所定期間が経過した場合に、第2リレー42により対応する経過痕跡を記録し、次回電源投入時に電源遮断信号としてCPU31に出力する。これにより、RAM33の記憶データを読み取り、経過痕跡を検出した場合に、その旨を操作者に報知することが可能となる。
(もっと読む)
アラーム情報を表示する機能を有する数値制御装置
【課題】アラームになった要因を数値制御装置に記憶したデータを使用して表示装置に具体的に表示するようにし、アラームが発生した際に顧客(ユーザ)が問題を解決するのに必要な工数を削減すること。
【解決手段】プログラムの実行中のアラーム発生時に実行していたプログラム番号、プログラムブロックの指令内容、アラームの判定に使われたデータを、数値制御装置内に記憶するアラーム情報記憶手段Gと、各アラームに対応するアラームの判定内容を記載したアラーム要因メッセージの雛形を記憶しているアラーム要因メッセージのアラーム要因メッセージ雛形記憶手段Iと、アラーム情報記憶手段Gに記憶されたアラーム情報を、対応する前記アラーム要因メッセージの雛形に組み入れる組み入れ手段Hと、組み入れ手段Hによって完成されたアラーム要因メッセージの表示を行う表示手段(J、K)と、を備えたアラーム情報を表示する機能を有する数値制御装置。
(もっと読む)
圧力制御と位置制御とを切り換える機能を有する数値制御装置
【課題】圧力制御から位置制御への切り換え時に速度指令値が不連続にならないようにし、切り換え時の機械的ショックが発生することを防止することが可能な圧力制御と位置制御とを切り換える機能を有する数値制御装置を目的とする。
【解決手段】圧力制御から位置制御への切り換えを外部からの指示により行うか、あるいは、切り換え条件に応じて自動的に切り換える機能を有する、圧力制御と位置制御とを切り換えて動作するサーボ制御部20を備えた数値制御装置5において、圧力制御中は、制御軸の現在の実速度に対応するサーボ位置偏差量を前記サーボ制御部20に設定するサーボ位置偏差量設定部15と、圧力制御から位置制御に切り換わった後には、予め設定してある加減速時定数に従って減速停止するのに必要なパルスを加減速処理部14aへ出力するパルス出力部16とを備えた圧力制御と位置制御とを切り換える機能を有する数値制御装置。
(もっと読む)
工作機械の異常復旧支援システム及び支援方法
【課題】工作機械の運転中に異常が発生したとき、オペレータがその原因を探し出して正常状態に復旧する作業を支援する技術に関し、異常メッセージや推定原因リストの表示及び状態センサの異常判定値を常に最適なものに更新する技術手段を提供する。
【解決手段】工作機械メーカに設置されたサーバー1と、ユーザ側に設置されている多数の工作機械2のNC装置4とをインターネット6で接続して、各工作機械2・・・の異常発生状態及びその原因をサーバー1に収集して蓄積し、その蓄積されたデータに基づいて異常メッセージ及び推定原因リストの内容や状態センサの異常判定値の設定値を適切なものに更新し、当該更新されたデータをインターネット6を通じて各機械のNC装置4に配信して、個々のNC装置4に設定されているこれらのデータを上書き更新する。
(もっと読む)
機械診断方法及びその装置
【課題】信頼性の高い損傷状況の診断を可能とする。
【解決手段】機械診断装置20は、位置指令値から得られるサーボモータ3へのトルク指令値に基づいて駆動対象駆動力を推定する駆動対象駆動力推定部21と、駆動対象駆動力からボールネジ4の弾性変形誤差を推定する弾性変形誤差推定部23と、サーボモータ3の回転位置とテーブル2の位置とから位置偏差を演算する位置偏差演算部22と、弾性変形誤差と位置偏差とを用いて機械損傷係数を演算し、得られた機械損傷係数を予め設定されている閾値と比較して駆動対象の損傷状況を診断する機械損傷診断部24とを備えている。
(もっと読む)
1 - 20 / 29
[ Back to top ]