
Fターム[3C269QB03]の内容
数値制御 (19,287) | 演算手段の構成、機能 (558) | 複数のプロセッサの利用 (342) | 監視、表示、記録用 (127)
Fターム[3C269QB03]に分類される特許
61 - 80 / 127
工作機械の運転機能制御装置
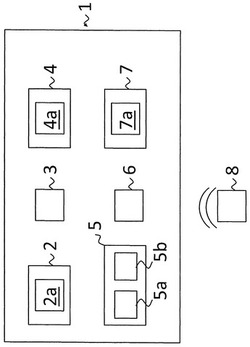
【課題】工作機械を運転する際の省エネルギーおよび安全の向上に貢献するものであり、使用者が、エネルギーおよび安全に関して最適化されるように単純な方法で異なる運転モードでの工作機械の運転を計画することができる装置を提供する。
【解決手段】主電源をスイッチオンまたはスイッチオフする装置2と、選択可能な基準に従って工作機械の運転機能のスイッチオフ時間を決定する少なくとも1つの装置3とからなる工作機械の運転機能制御装置を提供する。
(もっと読む)
工作機械

【課題】不正移設を検知し、不正移設後の工作機械の起動を禁止する。
【解決手段】工作機械の本体フレームの底部の溝部2c内に、フォークリフトのフォークからの外力で残留応力が残る銅板製の被測定部材28を設け、被測定部材28の一端に加振器29を他端に振動検出器30を設置し、工作機械の設置後の初期に加振器29と振動検出器30を介して振動を付加して振動データを取得し、基準波形パターンである第1振動特性を演算し記憶しておく。工作機械の電源投入時に、前記同様に今回の振動データを取得し、今回の波形パターンである第2振動特性を演算し記憶しておく。工作機械の移設がない場合には、第1,第2振動特性が一致するが、フォークリフトによる搬送を介して工作機械を移設した場合、被測定部材28の内部に残留応力が残るため、第1,第2振動特性が一致しなくなるため、その場合は工作機械の起動を禁止する。
(もっと読む)
工作機械、工作機械の温度測定部の数及び配置の決定方法及びプログラム
【課題】工作機械において熱変位量の推定を、逆解析により求めた熱源の同定方法によって精度良く熱変位の補正が可能である熱変位補正方法を提供する。
【解決手段】複雑な構造の駆動系の熱変位誤差を補正と、熱変位量の推定をする方法にあたって、まず、構造体に設置されている温度センサのうち有用性の高いものを温度測定部として選択し、次に、被測定構造体の熱源領域の設定を行い、被測定構造体の温度上昇量を行い、次いで逆解析により熱源領域の熱流入量を測定し、熱流入量を変数とする熱変位の補正式の確立が行われる。続いて各熱源への熱流入量を考慮した熱変位量の推定を行い、熱流入量に基づく熱変位補正が可能になる。
(もっと読む)
数値制御装置、工作機械の制御方法、及び工作機械の制御プログラム
【課題】ソフトウェアやハードウェアを複雑化することなく、プロセッサの処理のうちの一定割合を安定的かつ確実に周辺機器の制御処理に対して配分する。
【解決手段】サーボ3,4及び周辺機器に係わる複数の動作を制御する数値制御装置であって、プロセッサ13と、システム制御周期タイマ111と、システム制御周期で、プロセッサ13に対し、第1割り込み要求を発生させるシステム制御周期割り込み発生器112と、システム制御周期タイマ111とは異なるサーボ同期周期タイマ122と、サーボ同期周期で、プロセッサ13に対し、第2割り込み要求を発生させるサーボ同期周期割り込み発生器123と、第2割り込み要求の周期を所定の複数の区間に分割するタイマ周期分割器123aと、所定の区間の開始時に、プロセッサ13に対し、周辺機器制御のための第3割り込み要求を発生させるサーボ同期周期割り込み発生器123と、を有する。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
ロボットシステム
【課題】異物に衝突したか否かにかかわらず、振動的な動作を伴うことなく且つ機構部品に損傷を与えることなくロボットを緊急停止させることができるロボットシステムを提供する。
【解決手段】緊急停止モードにおいて、位置制御部31は、上位制御部から与えられる位置指令pcにかかわらず出力する速度指令vcをゼロに固定し、通常の位置制御は行わない。速度制御部32は、モータMの回転速度v*をゼロに固定された速度指令vcに一致させるように電流指令演算値ic’を演算するとともに、その電流指令演算値ic’に対して所定のフィルタ制御を行って電流指令icの変化量を所定の制限値以下に制限する。
(もっと読む)
溶接制御プログラム更新設定装置
【課題】 従来の溶接制御プログラム更新設定装置では、溶接機に記憶されている溶接制御プログラムがユーザによって無制限に更新できる。
【解決手段】 外部コンピュータから送信される溶接制御プログラムを受信する第1の通信インターフェース回路と、溶接制御プログラムを記憶する記憶回路と、書き込み又は読み出しを選択する選択スイッチと、書き込みのとき溶接制御プログラムを記憶回路に書き込み、読み出しのとき溶接制御プログラムを読み出す中央演算処理回路と、読み出した溶接制御プログラムを溶接電源に送信する第2の通信インターフェース回路とを備え、中央演算処理回路は、読み出し回数が基準回数未満のとき溶接制御プログラムを読み出し第1の通信インターフェース回路に入力すると共に読み出し回数をカウントアップし、読み出し回数が基準回数のとき読み出しを停止する溶接制御プログラム更新設定装置である。
(もっと読む)
回転速度演算装置
【課題】算出した安定回転速度を表示するか否かを決定し、びびり振動を抑制できないような安定回転速度を作業者に知らせることのない回転速度演算装置を提供する。
【解決手段】安定回転速度の算出に用いたk値若しくは今回算出した安定回転速度と直前のk値を用いて算出した安定回転速度との差と、所定の設定値との比較にもとづいて安定回転速度を表示手段に表示するか否かを決定するようにした。したがって、たとえばk値が所定の設定値よりも大きく、びびり振動を効果的に抑制できないような安定回転速度については表示しない。つまり、表示手段には、びびり振動の抑制に比較的有効な安定回転速度のみが表示されるため、作業者にとって使い勝手が良い。
(もっと読む)
自動作業システムにおけるロボットの診断方法及び診断プログラム
【課題】 位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレ量を検出してこのズレ量に基づいて位置決めロボット又は作業ロボットに異常が生じたか否かを診断する。
【解決手段】位置決めロボット100が保持ツール105により保持したワークを作業ツール205の目標位置に搬送して位置決めするとともに、作業ロボット200がワークに対し所定の作業を行う際、ロボット制御装置300が、第1のロボットアーム110の先端部位又はワークに設けられた慣性センサ106において検出される慣性力に基づいて保持ツール105の位置ズレ量を検出し、検出した位置ズレ量ΔP1を用いて位置決めロボット100に異常が発生したか否かを検出する。
(もっと読む)
工作機械の衝突防止方法
【課題】3Dモデルを仮想空間で動作させてモデル相互の干渉により衝突を検出する衝突防止方法において、実際には衝突が起らないにも関わらず衝突と判断されて機械が停止する問題を回避する。
【解決手段】予め登録されている機械各部、工具及びワーク素材の形状データに基づいて仮想空間で加工動作を実行させる工作機械の衝突防止方法において、NC装置に移動ベクトルの変化点における移動先座標及び移動速度情報を履歴情報として記憶させ、パソコンに、受信した履歴情報に含まれる移動ベクトルの変化点における移動先座標及び移動速度情報に基づいて干渉の有無を判断させた後、読取った時点における移動先座標及び移動速度情報に基づいて前記干渉の有無を判断させる。
(もっと読む)
切断装置
【課題】CCDカメラによって切断可能領域を撮影して該切断可能領域に配置された被切断材の形状や寸法を略正確に認識した上で該被切断材から切断すべき図形を割り当てる。
【解決手段】切断装置Aは、切断トーチ2と、切断トーチを切断可能領域内に移動させる台車40と、台車の駆動を制御する台車駆動制御装置30と、切断可能領域の上方に配置されて撮影するCCDカメラ1と、切断可能領域の画像を処理して配置された被切断材の形状を認識する画像処理装置10と、形状が認識された被切断材に切断すべき部品25〜27を割り当てる割当制御装置20とを有し、画像処理装置10が、画像に生じたレンズ収差を補正するレンズ収差補正部11と、CCDカメラの傾きを補正する傾き補正部12と、切断可能領域の画像を複数の領域に分割すると共に分割した各領域毎に閾値を設定して二値化することで被切断材の形状を認識する形状認識部13とを有する。
(もっと読む)
ロボットシステム
【課題】複数台のロボットを複数人で並行して教示を行う時に、携帯操作盤に対応したロボットのみの動作を許可する、より簡易なロボットシステムを提供すること。
【解決手段】複数台のロボットと、ロボットの動作を許可または禁止するイネーブル装置を含む携帯操作盤とを備え、ロボットを駆動制御するロボット制御装置を通信路により互いに接続したうえで、各ロボットの動作モードとイネーブル装置の操作に基づくイネーブルリンク信号を各ロボット制御装置間に伝達することで、各携帯操作盤に対応するロボットの駆動電源の投入と遮断を制御する。
(もっと読む)
加工誤差予測のためのコンピュータプログラム、加工誤差予測装置およびその予測結果に基づいて工具経路を修正する装置
【課題】工具の形状誤差や撓みに起因する加工誤差を高速に予測可能な装置などを提供する。
【解決手段】コンピュータ装置1の3次元グラフィックス機能を利用し、加工誤差を予測する位置における工具M(切刃の通過軌跡)、この位置の直前および直後を含む所定範囲の工具掃引体T1,T2、および被削物形状Wを、それぞれ下方からの視野範囲Vにおいて描画する。描画された画像において工具Mが手前に表示されている画素領域を、加工終了後に残る加工面の領域として検出し、この加工面の代表点(創成点C)における工具の形状誤差や撓み量から加工誤差を予測する。予測した加工誤差に基づいて工具経路を修正すれば、成形後の手修正に要する工数、時間を大幅に削減できる。
(もっと読む)
安全制御装置、ロボット、システム、プログラム、及び、記録媒体
【課題】安全制御手段を内蔵したロボットと併用することによって、該安全制御手段を2重化することができ、また、該ロボットと別個に使用することができる安全制御装置を実現する。
【解決手段】安全制御装置2は、センサにより検出された外界の状態に応じて内部状態を遷移させるか、または、安全制御手段11bにより発行されたコマンドに応じて内部状態を安全制御手段11bと同期させるFPGA基板21であって、内部状態を安全制御手段11bと同期させるときに、センサにより検出された外界の状態が予め設定された特定の条件を満たしているか否かを判定し、満たしていないと判定した場合にはサーボ機構12への電力供給を断つFPGA基板21を備えている。
(もっと読む)
ロボット及びユニットコントローラ及び制御ユニット間協調制御方法
【課題】 制御ユニット間で直接に障害発生通知を授受するとともに、障害発生通知を元にホストコントローラにて決定した制御ユニット全体での障害対応を各制御ユニットで実施することができる、柔軟性の高い協調制御が可能なロボット及びユニットコントローラ及び制御ユニット間協調制御方法を提供する。
【解決手段】 ユニットコントローラ131に、障害パラメータと、他の制御ユニットからの障害発生通知と、ホストコントローラからの障害対応指令に基づき、自身の制御ユニット130の障害への対応を決め処理を実行する障害対応手段判定部137を備える。
(もっと読む)
シミュレーション装置
【課題】別個の指令プログラムに基づいて動作するロボットと工作機械のシミュレーション結果を表示装置に表示できるようにしたシミュレーション装置を提供する。
【解決手段】シミュレーション装置10は、経過時刻を指定するシミュレーション管理部24と、指定経過時刻まで動作プログラムを実行さて、指定経過時刻におけるロボットの動作位置を求めるロボット動作演算部12と、加工プログラムを連続的に実行しながら工作機械の動作位置を逐次求めていく工作機械動作演算部14と、単位時間が経過するたびに、求められた工作機械の動作位置を経過時刻と対応付けて記憶する工作機械動作記憶部18とを備える。シミュレーション管理部は、ロボット動作演算部と工作機械動作演算部から取得した指定経過時刻におけるロボットと工作機械の動作位置に基づいて、ロボット及び工作機械の三次元モデルを表示装置26上に表示させる。
(もっと読む)
工作機械用制御装置
【課題】コストを抑えながらも、操作者の熟練度に左右されず直感的に素早く操作が行えるようにした工作機械用制御装置を提供する。
【解決手段】工作機械を制御する工作機械制御手段53と、三次元形状モデルをシミュレート動作させるシミュレート手段54と、三次元形状モデルを表示するモデル表示手段55とを備えた工作機械用制御装置50において、工作機械の自動運転時に行われる一連の動作を個々の動作に分割した各個動作で動作させる部位の三次元形状モデルごとに作業順番を表示する作業順番表示手段56と、作業順番が表示された三次元形状モデルが選択されると選択された三次元形状モデルに対応する部位を動作させるメニューを表示するメニュー表示手段57と、表示されたメニューが操作されると操作されたメニューに対応する動作となるように選択された三次元形状モデルに対応する部位を制御する部位制御手段61とを有する。
(もっと読む)
分解工学を用いた構成部品の合致
構成部品を合致させるための方法は、合致ツールを用いて第1構成部品を測定し、その測定に基づいて第1構成部品に対する位置データを記録することを含んでもよい。合致ツール用の経路は、位置データを用いて提供してもよく、かつ、第2構成部品は、その提供された経路に基づいて同じ合致ツールを移動させることにより修正してもよい。  (もっと読む)
(もっと読む)
工作機械の振動抑制方法及び装置
【課題】負荷の大きい繰り返し計算を行うことなく、びびり振動を効果的に抑制できる最適回転速度を容易且つ高精度に求める。
【解決手段】主軸に工具を装着して工具或いはワークのモーダルパラメータを求め(S1,2)、モーダルパラメータ及び加工条件に基づいて、びびり周波数と位相差との関係を近似式として生成する(S3)。加工開始後、びびり振動が発生したら(S7)、近似式を用いて目標位相差に対応するびびり周波数を求め、当該びびり周波数と工具刃数及び主軸回転速度とに基づいて最適回転速度を演算し(S8)、その最適回転速度に従って主軸の回転速度を変更する(S9)。
(もっと読む)
61 - 80 / 127
[ Back to top ]