
Fターム[3C269QC01]の内容
Fターム[3C269QC01]に分類される特許
81 - 100 / 335
数値制御マシンツールのための予測制御及び仮想表示システム
本システムは、ルール(T)用ツールホルダ(2)、ツール(T)による工作対象ワークピース(W)用キャリア(3)、及び、前記ツール(T)と前記ワークピース(W)との間に制御された各軸方向の相対変位をもたらすべく関連ドライバ(D1、…、DN)によって制御可能な複数のアクチュエータデバイス(A1、…、AN)を含むマシンツール(M)のための制御及び仮想表示(1)を行う。制御システム(1)は駆動手段(D1、…、DN)に接続されて、製造される前記ワークピース(W)の特徴及びツール(T)の特徴に応じた所定の工作プログラムを実装するのに適した数値制御器(NC)であって、工作プログラムに基づいて、軸方向のツール(T)の位置であって関連するアクチュエータデバイス(A1、…、AN)の作動によって達成される位置を画定する目標座標を計算するのに適した数値制御器(NC)と、画像表示手段(ID)と、計算された目標座標の値を受け取るべく数値制御器(NC)と協働し及び/又はこれに接続された処理システム(P)とを含み、当該システムは、マシン(M)の、ワークピース(W)の、及びツール(T)の目標座標に基づいて及び格納された数学モデルに基づいて、工作が進行中に、予め設定された「予測時間窓」においてワークピース(W)に及びマシン(M)に予め選択された未来の瞬間まで採用される位置の仮想2次元表現を画像表示手段(ID)上に作るのに適した画像データを生成するべく構成される。  (もっと読む)
(もっと読む)
ロボットのツールベクトルの導出に用いる治具
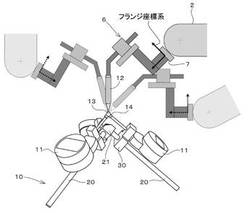
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する際に好適な治具を提供する。
【解決手段】本発明に係る治具10は、先端部に平面接触子14が備えられると共に平面接触子14に対し垂直方向を向く計測軸に沿った変位を計測可能で且つ平面接触子14でツール先端の位置ずれ量を計測して実績位置ずれ量とする3つの変位計11と、3つの変位計の各計測軸が1点で互いに直交し且つ各計測軸の交点が空間上の所定点となるように、3つの変位計11を配備する配備手段15と、を有する。
(もっと読む)
教示データの修正システム

【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
パソコン機能を有する数値制御装置
【課題】パソコンのオペレーティングシステムが起動しない場合でも、数値制御装置の画面を表示する。
【解決手段】パソコン100に接続された記憶装置は、領域1に汎用OSと表示アプリを、領域2に保守用OSと数値制御装置の画面を表示する表示アプリを格納する。(1)数値制御装置200は、パソコン100を起動する信号をパソコン100に送る。(2)パソコン100は、保守用OSを起動し、従来通りに汎用OSを起動する。(3)汎用OSが起動した場合、数値制御装置200に起動完了を通知し、表示アプリを実行する。(4)パソコン100からの起動完了の通知が無い場合、数値制御装置200は、パソコン100をリセットし再起動する。(5)数値制御装置200は、保守用OSで画面を表示するための起動信号をパソコン100に送信する。(6)パソコン100は再起動後、保守用OSを起動し、保守用表示アプリを実行してCNC画面を表示する。
(もっと読む)
加工シミュレーション装置及び方法
【課題】切削加工シミュレーションにおいて、加工傷の発生状況とその発生メカニズムとに関する定量的な分析を支援する各種の特性量をより直感的に把握できる加工シミュレーション装置及び方法を得ること。
【解決手段】工具の種別及び形状を示す工具データ6及び工具の移動軌跡を示す工具移動軌跡データ7に基づいて切削加工をシミュレートして被加工物の形状を示す被加工物形状データ8を生成する切削形状処理部2と、切削加工の過程における被加工物の加工面上の着目点について、着目点の創成に関与した特性量を、被加工物形状データ8、工具データ6及び工具移動軌跡データ7に基づいて算出する工具移動特性量算出部4と、被加工物形状データ8に基づいて生成された、予め定められた視線方向に沿った被加工物の投影イメージに、特性量を重畳してディスプレイデバイス9に表示させる切削形状表示部3とを有する。
(もっと読む)
工具配置算出装置、工具配置算出プログラムおよび記憶媒体
【課題】工具マガジンの切替回数が最小となる工具配置を確実に算出できる工具配置算出装置、工具配置算出装置の制御プログラムおよび記憶媒体を提供する。
【解決手段】数値制御装置のCPUは、NCプログラムから工具交換指令を読み込み、工具Tの使用順番Lを記憶する(S11、S12)。使用順番Lにおいて、NCプログラムの工具の使用順で単発工具が連続する単発工具連続箇所Miを記憶する(S15)。単発工具連続箇所Miを1本の工具とみなし、順列Wの全ての組合せを生成する(S17)。各順列Wを工具配置Qに変換し、切替回数Rを算出する(S18,S19)。それ故、切替回数Rの計算に係る処理量は格段に減少するので、切替回数Rの最も少ない最適工具配置を確実に算出できる。
(もっと読む)
数値制御装置及び数値制御方法
【課題】移動量及び動作を開始して終了するまでの時間の入力を受け付けることにより、自動的に移動軌跡データ及び速度データを生成して工作機械の動作を制御することができる数値制御装置及び数値制御方法を提供する。
【解決手段】移動量データ及び移動時間データの入力を受け付け、入力を受け付けた移動量データ及び移動時間データに基づいて、制御対象の移動軌跡を示す移動軌跡データ及び速度の変化を示す速度データを生成する。生成した移動軌跡データ及び速度データに基づいて、工作機械の各軸を駆動するサーボモータの動作を制御するサーボデータを出力する。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
製造システム、製造方法、およびプログラム
【課題】簡単に、付加物が付加された対象物の形状を成形でき、特に、対象物を計測してから、より迅速に成形する。
【解決手段】スキャナ11は、人の顔16の表面の各点の3次元空間上の位置を測定し、ポリゴンデータを出力する。コンピュータ14は、ポリゴンデータを、顔16の形状を示すサーフェースデータに変換し、兜の形状を示すサーフェースデータと、顔16の形状を示すサーフェースデータとを合成する。マシニングセンタ15は、兜の形状が予め成形されているブランクに、合成されたデータで示される形状によって人の顔16の形状を成形する。本発明は、製造システムに適用できる。
(もっと読む)
数値制御装置
【課題】メンテナンス通知が発生しても、工作機械操作者が工作機械を停止することがなく、生産性を高めることができる数値制御装置を提供すること。
【解決手段】CPU2は、現在の時間と、現在のアラーム番号と対応付けてRAM4に記憶された表示時間とを比較する(S30)。現在の時間が、表示時間の範囲外の場合、CPU2は、表示許可時間帯ではないと判断し(S30:NO)、アラームを表示するステップS40を省略する。
(もっと読む)
多系統プログラムの自動プログラミング方法及びその装置
【課題】加工時間が最短となる多系統用加工プログラムを作成する。
【解決手段】自動プログラミング装置において、加工対象物を加工するための加工工程作成手段と、加工工程毎の加工時間を計算する計算手段と、各加工工程について、実行可能な系統を入力する系統入力手段と、実行可能な加工順序を入力する加工順序入力手段と、同時に実行可能な他の加工工程が存在する場合、同時に実行可能な加工工程を入力する同時実行加工工程入力手段と、作成された加工工程、計算手段によって計算された加工時間、系統入力手段によって入力された実行可能な系統、加工順序入力手段によって入力された実行可能な加工順序、および、同時実行加工工程入力手段によって入力された同時に実行可能な加工工程に基づいて、加工時間が最短となる加工プログラムを選出する選出手段と、を備える。
(もっと読む)
ロボット制御システム
【課題】
1台の可搬式操作部を、複数のコントローラにつなぎ換えて使用する場合、操作者のミスにより意図せぬロボットと接続してしまい、意図せぬロボットを操作してしまうことを防止する。
【解決手段】
ロボット制御システムは、ティーチペンダント10と無線通信で情報を送受信する複数のコントローラ20Aと、コントローラ20A毎に接続されるとともに該コントローラ20Aにより制御可能なロボットを備える。コントローラ20Aは、ティーチペンダント10と接続関係が構築された際、ロボットモータを制御するサーボドライバ27に電力供給遮断を行うマグネットスイッチMSに対して電力遮断指令を付与するマグネットスイッチ制ラダー部60を備える。マグネットスイッチMSは、電力遮断指令に基づいてサーボドライバ27への電力を遮断する。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
切削装置、切削方法、プログラムおよびコンピューター読み取り可能な記録媒体
【課題】簡単な切削を手軽に行うことができるようにした。
【解決手段】ツールと被加工物との相対的な位置関係を3次元で変化するとともにツールにより被加工物に対して切削加工を行う切削装置において、予め定められた複数の切削加工から所定の切削加工を設定する第1設定手段と、予め定められた複数の切削加工領域の形状から所定の設定する第2設定手段と、第2設定手段により設定された切削加工領域の形状の切削加工位置を設定する第3設定手段と、切削加工に使用するツールを設定する第4設定手段と、切削加工によって切削処理される被加工物の材料を設定する第5設定手段と、第1設定手段と第4設定手段と第5設定手段とによる設定に基づいて切削条件を算出して設定する第6設定手段と、第1乃至第6設定手段よる設定に基づいて切削データを生成する生成手段とを有し、生成手段により生成された切削データに基づいて切削加工を行うようにしたものである。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
数値制御装置
【課題】ショートカット機能の使い勝手を向上させて、パラメータの閲覧又は編集を能率的に行う。
【解決手段】登録ショートカット情報に動作情報が設定されている場合(S12;Yes)、CPUは工作機械の動作情報を取得し、取得した動作情報に基づいて登録ショートカット情報を書き換える(S13)。登録ショートカット情報に直前操作画面情報が設定されている場合(S14;Yes)、CPUは、直前操作画面情報を取得し、取得した直前操作画面情報に基づき登録ショートカット情報を書き換える(S15)。S16においてCPUは、ショートカット先の画面の付属情報を取得し、取得した付属情報に基づき登録ショートカット情報を書き換える。S19においてCPUは、ショートカット先の画面の画面遷移情報を登録ショートカット情報に置き換え、置き換えられた画面遷移情報に基づいて画面を表示すると共に、ショートカット画面を消去する。
(もっと読む)
ロボットのティーチング装置及びティーチング方法
【課題】ロボットを操作するための専門知識を有していなくても作業ノウハウを正確に教示すること。
【解決手段】作業者の手に装着されるモーションキャプチャ2と、モーションキャプチャから送信される3次元座標データに基づき産業用ロボット4を制御する制御部31とを備え、制御部31は、予め定められたサンプリング間隔でモーションキャプチャの位置をサンプリングし、移動距離算出機能31aと、移動速度算出機能31b、および、産業用ロボットの保持部が、ロボットの動作基点設定機能31cで設定された動作基点から移動速度算出機能31bで算出された移動速度で、サンプリングされたすべてのサンプリング点に沿って移動するように、当該産業用ロボットをティーチングする産業用ロボット制御機能31dとを有する。
(もっと読む)
数値制御装置
【課題】制御位置座標を表す複数の指令点の指令点座標データから移動平均値を演算可能な数値制御装置を提供し、CPUの処理負荷を軽減させて処理時間を短縮可能な数値制御装置を提供する。
【解決手段】数値制御装置は、工作機械の制御位置座標を表す複数の指令点の指令点座標データを平滑化処理する平滑化処理手段を有し、この平滑化処理手段は、複数の指令点の各々について、各指令点を含む前後の複数の指令点の指令点座標データの移動平均値を演算する移動平均値演算手段と、前記移動平均値演算手段が演算した移動平均値からなる平均化指令点座標データを各指令点の指令点座標データに置換するデータ置換手段とを有している。
(もっと読む)
ロボットの制御装置及びロボットの位置修正制御方法
【課題】ロボット本体の手先の教示点の修正が、アーム全体について意図しない動作を生じさせることを回避できるロボットの制御装置を提供する。
【解決手段】制御装置は、ティーチチェックモードの実行停止時点に実行中であった制御プログラム中の命令を判定し、当該命令が動作命令MOVEであれば当該動作命令を、動作命令MOVEでなければ直近に実行された動作命令MOVEを対象として、その時点の手先位置が動作命令MOVEの目標位置に一致しているか否かを判定する(S8,S9)。手先位置と目標位置とが一致していない場合は(S9:NO)、以降に行われるユーザの修正操作に応じた手先位置の修正制御を行い(S16)、手先位置と目標位置とが一致している場合は(S9:YES)、以降に行われる手先位置の修正制御に制限を付与する制限付き修正制御を行う(S10〜S12)。
(もっと読む)
81 - 100 / 335
[ Back to top ]