
Fターム[3C269QC01]の内容
Fターム[3C269QC01]に分類される特許
101 - 120 / 335
作業マニピュレータのセンシング動作生成方法、センシング動作生成装置及びセンシング動作生成プログラム
【課題】実際の作業ワーク情報と教示データとの誤差が大きい場合でも、適切なセンシング動作の自動生成をして、センシング動作データの修正、再設定作業の負荷を軽減する。
【解決手段】作業ワークWに接触可能な接触式センサ3を備えた作業マニピュレータ2がセンシング動作を行う際に用いられるセンシング動作データを生成する。作業マニピュレータ2の接触式センサ3が作業ワークWに接触するセンシング姿勢Sにおいて、接触式センサ3が接触する作業ワークWの接触面Tを抽出すると共に、この接触面Tを構成する一つのエッジEを選択し、選択された一つのエッジEの位置と、接触式センサ3の基端3b側に設定した設定位置6を接触面Tに射影した位置WPとが一致するように、作業マニピュレータ2のセンシング姿勢Sを再設定し、再設定されたセンシング姿勢Sを含むように作業マニピュレータ2のセンシング動作データを生成する。
(もっと読む)
数値制御装置、数値制御装置用制御プログラム及び数値制御装置用記録媒体

【課題】熟練度の低い作業者でも再起動する際の作業を簡単に行う。また、再起動までの時間を短縮する。
【解決手段】数値制御装置は、工作機械の数値制御時において、加工プログラム中に予め記述したMコード「M330」を検出したときに禁止モードを設定する。ワーク加工中に停電又はエラー等が発生した場合は、加工は中断する。作業者は、加工を再開するためにキーボードの起動キーによって加工プログラムの先頭からの再起動を指令する。該再起動の指令によってCPUは、起動許可信号が入力されたか否かを判定する(S1)。起動許可信号が入力されていない場合(S1;No)、CPUは、バックアップRAMを参照して起動禁止フラグFが1であるか否かを判定する(S2)。起動禁止フラグFが1である場合(S2;Yes)、加工プログラムの先頭からの再起動を禁止し、ディスプレイにアラームを表示した後(S10)、処理を終了する。
(もっと読む)
ロボットの姿勢判定方法
【課題】簡易な演算により、ロボットの姿勢を判定するロボットの姿勢判定方法を提供する。
【解決手段】ワークに想定される誤差Δpにともなうエンドエフェクタの位置の変化を位置変化量Δr、誤差Δpにともなうマニピュレータにおける各軸の変化量を姿勢変化量Δq、誤差Δpが存在しないときのマニピュレータの各軸の値をqiとし、このqiにおけるヤコビアンをJv(qi)とすると、姿勢変化量Δqを、Δqi=Jv(qi)-1Δrにより算出する。そして、誤差Δpが最大となるときのマニピュレータの各軸の変化量を変化量Δqimaxとし、関節の回転角度限界をqmaxとすると、qi+Δqimax≦qmaxを満たすマニピュレータの各軸の値qiを誤差Δpを有するワークに対し当該作業点iにおける作業が可能な姿勢であると判定する。
(もっと読む)
誤動作を防止する機能を備えた数値制御装置
【課題】工作機械において、座標系の変更による、加工不良、機械干渉を防止し、および加工不良、機械干渉の発生時の原因究明に要する時間を短縮することが可能な誤動作を防止する機能を備えた数値制御装置を提供すること。
【解決手段】機械の基準となる第一の座標系と所定の位置関係に設定された第二の座標系でプログラムする機械を制御する数値制御装置10において、前記第一の座標系と第二の座標系の位置関係を確立した後に座標系が変更されたか否かを監視する座標系変更監視手段16と、座標系変更監視手段16によって座標系の変更が行われたと判断された場合に、前記機械の運転の停止(アラーム発生手段19)あるいは警告表示(ワーニング表示手段20)の少なくともいずれか一つの処理を実行する手段と、を有することを特徴とする誤動作防止機能を備えた数値制御装置。
(もっと読む)
工作機械
【課題】不正移設を検知し、不正移設後の工作機械の起動を禁止する。
【解決手段】工作機械の本体フレームの底部の溝部2c内に、フォークリフトのフォークからの外力で残留応力が残る銅板製の被測定部材28を設け、被測定部材28の一端に加振器29を他端に振動検出器30を設置し、工作機械の設置後の初期に加振器29と振動検出器30を介して振動を付加して振動データを取得し、基準波形パターンである第1振動特性を演算し記憶しておく。工作機械の電源投入時に、前記同様に今回の振動データを取得し、今回の波形パターンである第2振動特性を演算し記憶しておく。工作機械の移設がない場合には、第1,第2振動特性が一致するが、フォークリフトによる搬送を介して工作機械を移設した場合、被測定部材28の内部に残留応力が残るため、第1,第2振動特性が一致しなくなるため、その場合は工作機械の起動を禁止する。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
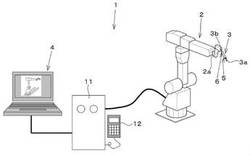
ロボットコントロール装置、ロボットコントロール方法
【課題】CPUが動作制御装置を単独で制御する用途、および、CPUを備えず動作指示装置からの指示に基づきロボットの動作制御する用途の両方の使い方を可能にするロボットコントロール装置、ロボットコントロール方法を提供することを課題とする。
【解決手段】ロボットコントロール装置1は、動作指示装置2と動作制御装置3とを備えている。動作制御装置3は、ロボット4が信号線5を介して接続されている。動作制御装置3は、通信ユニット300と動作制御ユニット400を備え、通信ユニット300と動作制御ユニット400とは、BUS端子302とBUS端子401を用いて接続され、通信ユニット300は、通信部301と、BUS端子302とを備え、動作制御ユニット400は、BUS端子401と、拡張ユニット判別部402と、実行部403と、第1記憶部404と、第2記憶部405と、ロボット制御部406とを備えている。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
産業機器、および工作機械
【課題】手動パルス発生器を用いて回転体の回転方向および回転速度を容易に設定、動作可能な工作機械を提供する。
【解決手段】工作機械1の制御装置800は、手動パルス発生器の回転ハンドルの回転によって生じたパルス信号に基づき、回転ハンドルの回転量、回転速度、および回転方向を判断する第1判断部850と、手動パルス発生器を有する操作器の軸選択信号発生部が発生した信号に基づき、軸選択スイッチによる軸の選択によって位置制御および回転速度制御のうちのいずれが選択されたかを判断する第2判断部860とを含む。制御装置800は、位置制御が選択されたと判断した場合、回転ハンドルの回転量と回転方向とに基づき、主軸の移動量と移動方向とを制御する。また、制御装置800は、回転速度制御が選択されたと判断した場合、回転ハンドルの回転速度と回転方向とに基づき、テーブルの回転速度と回転方向とを制御する。
(もっと読む)
工作機械、工作機械の温度測定部の数及び配置の決定方法及びプログラム
【課題】工作機械において熱変位量の推定を、逆解析により求めた熱源の同定方法によって精度良く熱変位の補正が可能である熱変位補正方法を提供する。
【解決手段】複雑な構造の駆動系の熱変位誤差を補正と、熱変位量の推定をする方法にあたって、まず、構造体に設置されている温度センサのうち有用性の高いものを温度測定部として選択し、次に、被測定構造体の熱源領域の設定を行い、被測定構造体の温度上昇量を行い、次いで逆解析により熱源領域の熱流入量を測定し、熱流入量を変数とする熱変位の補正式の確立が行われる。続いて各熱源への熱流入量を考慮した熱変位量の推定を行い、熱流入量に基づく熱変位補正が可能になる。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
数値制御プログラムのコマンド表示装置及びコマンド表示プログラム
【課題】工作機械のための数値制御プログラムに記述されたペアコマンドの相対関係を容易に確認することを課題とする。
【解決手段】対で使用されるペアコマンドA2を一組以上含む複数のコマンドA1の中から選ばれるコマンドA1で記述され記憶部(数値制御プログラム保存領域31)に記憶されている数値制御プログラムP1に記述されたペアコマンドA2を抽出し、前記ペアコマンドA2の組PA1毎に前記抽出されたペアコマンドA2を分けて前記数値制御プログラムP1に記載された順に並べて表示する。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
N個のロボットを同時に制御するロボット制御装置
【課題】ロボットを容易に追加および削除できると共に低コストで小型にする。
【解決手段】N個(N≧2)のロボット(R1〜Rn)を同時に制御するロボット制御装置は、メイン制御ユニット(MCU)を具備し、メイン制御ユニットは、N個のロボットのそれぞれの動作指令を作成するメインプロセッサ(MP)と、メインプロセッサにより作成された動作指令に基づいてロボットのそれぞれを駆動するサーボモータの動作量を算出するサーボプロセッサ(SP)と、を含んでおり、さらに、メイン制御ユニットに接続された、N個のアンプユニット(AU1〜AUn)を具備し、サーボプロセッサにより算出されたサーボモータの動作量に基づいてN個のロボットのうちの1個のロボットのサーボモータを駆動するサーボアンプ(SA1〜SAn)、を含む。
(もっと読む)
材料取り合わせシステム
【課題】組み合わせの良い割り付けを先取りする割り付け計算法で後半の割付け結果を改善する。
【解決手段】割り付け対象製品を2以上のグループに分割するグループ分け手段21と、各グループに属する製品について、材料に対する製品の組み合わせの良い割り付けを先取りする割り付けを実行する第一仮割り付け手段22と、仮割り付けが終了したグループについて、各グループの後半の割り付け結果を解体する部分解体手段23と、解体されて未割り付けとなった製品を集めて新たなグループを作り、この新たなグループに属する製品について、任意の割り付け方法を使用して割り付けを行う第二仮割り付け手段24と、全てのグループの割り付け済みの製品とそれを割り付けた材料とを示す割り付け結果を出力する割り付け結果出力手段25とを備えた。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
加工シミュレーション装置、加工シミュレーション方法、プログラム、記録媒体
【課題】高速に計算を行うことができ、十分な精度が得られる加工シミュレーション装置等を提供する。
【解決手段】加工シミュレーション装置1は、工具形状データ、加工シミュレーション前のワーク形状データ、仕上がり形状データ、ホルダ形状データを記憶する記憶部9と、工具形状データと仕上がり形状データを用いて工具経路データを生成する工具経路生成部19と、ホルダ形状データと仕上がり形状データを用いてホルダが上記の仕上がり形状に干渉しないホルダ経路データを生成するホルダ経路生成部21と、工具経路データとホルダ経路データを用いてホルダが上記の仕上がり形状に干渉しないホルダ干渉回避工具経路データを生成するホルダ干渉回避工具経路生成部23と、工具形状データとホルダ干渉回避工具経路データを用いて加工シミュレーションを行い加工シミュレーション後のワーク形状データを生成する加工シミュレーション部25とを具備する。
(もっと読む)
研削加工ワークの補正研削加工方法
【課題】被研削加工ワークの補正研削加工時間を短縮でき、かつ、寸法精度の優れる加工ワークを与える。
【解決手段】機上画像計測システムおよびエアブローを備えたNC研削装置を用いて、ワークの測定基準位置と公差を数値制御装置に入力した後に砥石によるワークの研削加工を開始し、ついで、研削加工を終了させて得られた研削加工ワークにエアブローしながら公差を測定し、補正研削加工プログラムを作成した後、補正研削加工を行う。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
101 - 120 / 335
[ Back to top ]