
Fターム[3C269QC01]の内容
Fターム[3C269QC01]に分類される特許
41 - 60 / 335
工作機械の工具軌跡表示装置
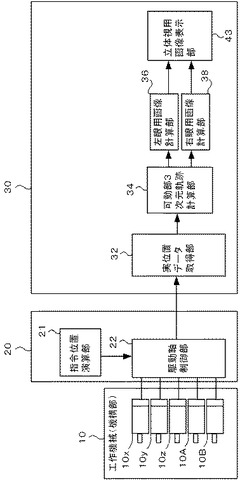
【課題】3次元形状を直感的に認識可能な工作機械の軌跡表示装置を提供する。
【解決手段】数値制御装置20は、指令位置演算部21により求められた指令位置に基づいて、各軸モータを制御する駆動軸制御部22とを備え、位置検出装置によって検出された各軸の実位置情報がフィードバックされる。軌跡表示装置30は、駆動軸制御部22から離散的な時刻における実位置データを同時に時系列データとして取得する実位置データ取得部32、可動部3次元軌跡計算部34、可動部3次元軌跡計算部34で求めた可動部の3次元軌跡から、立体視用左眼画像データを計算する左眼用画像計算部36,立体視用左眼画像データを計算する右眼用画像計算部38、左眼用画像計算部36からの立体視用左眼画像データ,右眼用画像計算部38からの立体視用左眼画像データを用いて、画像を対応する左右のそれぞれの眼から見えるように表示する立体視用画像表示部43を備える。
(もっと読む)
最適環境設定システム

【課題】複数の作業者にとって最適な環境に設定する最適環境設定システムを提供する。
【解決手段】複数人の作業者が使用する加工機械2を各作業者Pにとって最適な環境に設定する最適環境設定システムであって、作業者Pの個人情報が予め記憶された個人情報記憶部と作業者Pにとって加工機械2の最適環境設定情報が予め記憶された設定個人情報記憶部とを有するカード3と、加工機械2に設けられてカード3に記憶された個人情報と最適環境設定情報とを読み取ると共に加工機械2での作業実績をカード3に書き込み可能なデータ読み取り書き込み部と、加工機械2に設けられてこのデータ読み取り書き込み部で読み取られた個人情報と最適環境設定情報とに基づいて加工機械2の環境を設定する環境設定部とを備えていることを特徴とする。
(もっと読む)
工作機械
【課題】長期間の放置に伴う主軸の焼き付を含めた破損要因をユーザ側で回避する。
【解決手段】マシニングセンタ1は、装置本体への電源供給をON/OFFする電源スイッチ56と、被加工物を加工する工具を備えた主軸9を回転駆動する主軸モータ74と、電源スイッチ56をOFFしている期間又は主軸モータ74が駆動していない期間の少なくとも何れか一方の期間を放置期間としてカウントするカウンタ55と、放置期間が予め規定した期間を超えているか否かを判定する数値制御装置50と、数値制御装置50が規定期間を超えていると判定した場合にその旨をユーザに報知するディスプレイ82と、を有し、数値制御装置50は、規定期間を超えていると判定した場合に主軸モータ74の駆動を制限する。
(もっと読む)
自動プログラミング装置および方法
【課題】加工形状の位置入力の手間が省け、さらに素材形状や加工形状間の関連した寸法・位置調整を容易にするための素材形状と加工形状又は加工形状間への依存関係を与える手間も省ける自動プログラミング装置を提供する。
【解決手段】加工形状入力手段が、素材形状から定義済みの加工形状を除去した加工素材形状を生成・記憶する加工素材形状生成手段と、加工形状の寸法・位置情報を入力する加工形状入力手段と、加工形状の種類に応じたその特定方向の位置を寸法・位置情報と加工素材形状から決定し位置を決定するための基準となった加工素材形状上の部位に対応する素材形状または定義済みの加工形状の部位と加工形状とに依存関係を設定する加工形状配置決定手段と、寸法・位置情報を修正した際に修正した加工形状に依存する加工形状も配置修正しさらに配置修正した加工形状に依存する加工形状も同様に配置修正することを繰り返す加工形状連動修正手段を含む。
(もっと読む)
加工データ生成システム、ソルバプログラム
【課題】加工工程決定、ツーリング決定、切削条件決定の各機能を有機的に結合し、CADデータを入力として穴加工のNCデータを一貫生成する。
【解決手段】加工データ生成システムは、加工データ生成手段21を中核とし、加工工程決定手段22、ツーリング決定手段23、切削条件決定手段24、統合データベース25等から構成される。加工データ生成手段21は、製品形状の中から個々の穴の形状を抽出する。加工工程決定手段22は、統合データベース25を参照して要求面粗度や要求精度を満足する個々の穴の加工工程を決定する。ツーリング決定手段23は、加工シミュレーションを行い、個々の穴加工の最適ツーリング形態を決定する。そして、加工データ生成手段21は、アプローチ経路とリトラクト経路を順次決定し、個々の穴加工の部分NCデータに切削条件決定手段24によって決定される最適切削条件を付与し、統合NCデータを生成する。
(もっと読む)
干渉チェック装置及びプログラム
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
砥石摩耗補正機能を備えるマシニングセンタ
【課題】耐熱合金などの難削材を研削した際の砥石磨耗量の補正手段を提供する。
【解決手段】砥石の外周及び端面をドレスするユニットと、砥石を含む工具の直径を測定するユニットと、砥石を含む工具の突き出し長さを測定するユニットと、研削条件値に対応する砥石半径減少量を、砥石の仕様と被削材の組み合わせに対応させて格納している砥石半径減少量データベースユニットと、工具の仕様と形状情報を格納している工具形状情報データベースユニットと、工具と被削材および仕上げ精度の組み合わせで加工条件を格納しているデータベースユニットと、被削材の素材形状と加工後形状を入力する被削材形状入力ユニットと、工具経路・加工条件決定ユニットと使用工具決定ユニットと砥石半径減少量決定ユニットと、加工シミュレーションユニットとNCデータ出力ユニットを具備し、砥石の半径減少量をNCデータに補正して、加工する。
(もっと読む)
衝突監視装置を備えた工作機械
【課題】衝突監視装置を備えた、工作物を機械加工する数値制御工作機械。
【解決手段】衝突監視装置200は、工作機械の機械部品に搭載される衝突センサ210、衝突センサ210に検出される計測値が衝突制限値を超えると工作機械の機械部品の衝突を検知する衝突検知手段220、および衝突検知手段220が衝突を検知すると工作機械の少なくとも1つの加工スピンドルおよび送り軸X,Y,Zを停止する停止信号を出力する信号出力手段230を備える。発明に係る工作機械は工作機械における衝突制限値を決定する装置240を備える。
(もっと読む)
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
力センサの出力に基づいてロボットのダイレクトティーチをおこなうロボット教示装置
【課題】スイッチなどを用いることなしに、操作感を簡易に変更する。
【解決手段】ロボット教示装置(10)は、少なくとも1軸方向の力と、該1軸に直交、かつ、互いに直交する2軸方向の夫々の軸回りのモーメントを検出する力検出部3と、ロボット1を移動させるときに基準とする移動基準座標系を設定する移動基準座標系設定部21と、ロボットを移動基準座標系の原点回りに回転移動させるか、前記移動基準座標系を基準にして並進移動させるかのいずれかの移動方法を設定する移動方法設定部22と、1軸方向の力と、2軸方向の夫々の軸回りのモーメントと、所定の作用基準点の位置とに基づいて、作用基準点における仮想力を算出する仮想力算出部23と、移動基準座標系と移動方法と仮想力とに基づいて、ロボットに対する力制御作用力を算出する力制御作用力算出部24と、力制御作用力に基づいて力制御をおこなう力制御部25とを含む。
(もっと読む)
3軸加工機用ワーク設置誤差補正部を有する数値制御装置
【課題】少なくとも直線軸3軸を有する3軸加工機において、ワークの設置誤差がある場合に加工点である工具先端点位置が正しくなるように補正する数値制御装置を提供すること。
【解決手段】テーブルに取付られたワーク(加工物)に対し少なくとも直線軸3軸によって加工する3軸加工機を制御する数値制御装置はワークを設置した時の設置誤差を補正するワーク設置誤差補正部92を備える。ワーク設置誤差補正部92には並進誤差・回転誤差指定部96から並進誤差・回転誤差が補正量として入力される。補正されたプログラム指令は補間部94により補間され、98X,98Y,98Zの各軸モータは、誤差補正された補間データによって駆動制御される。
(もっと読む)
歯車形状修整入力描画装置及び歯車形状修整入力描画方法
【課題】歯形、歯すじデータの簡易入力による歯形、歯すじ形状の表示及びが確認できる歯車形状修整入力描画方法を提供するにある。
【解決手段】ワーク51に砥石31を接触させてワーク51を歯車として研削する歯車加工における歯車の歯形、歯すじ修整を行う際の入力方法として、典型的な3つのパターンであるクラウニング、テーパ及びクラウニングレリービングの各修整データ(Cr,Ctop,Tp,Lu,Ls,Rv1,Rv2,R1,R2及びR3)を入力手段から入力する一方、入力手段から入力された修整データ(Cr〜R3)に基づいて演算手段221によりクラウニング、テーパ及びクラウニングレリービングを組み合わせた修整形状(図8〜図12)を演算し、演算手段221から表示手段400,500に対して出力手段223にて修整形状(図8〜図12)を出力し、表示手段400,500にて修整形状(図8〜図12)を描画することを特徴とする。
(もっと読む)
7軸多関節ロボットの制御装置および教示方法
【課題】 教示作業時においてロボット全体の動作軌跡を容易に把握して適切な教示を行うことができる7軸多関節ロボットの制御装置および教示方法を提供する。
【解決手段】 7軸多関節ロボット1の教示を行う教示モードにおいて、所定の平面Pzを設定する設定器21と、肘部Eの動作軌跡が設定器21により設定された平面Pz内に制限されるように7軸多関節ロボット1を動作制御する制御器23と、手先11の位置が教示された場合に、肘部Eの動作の制限を拘束条件として、手先11の位置変化に基づく各回転軸A1〜A7の回転角度を演算する逆変換演算を行う演算器22とを備えている。
(もっと読む)
数値制御工作機械、制御プログラム及び記憶媒体
【課題】工具交換サイクルを短縮できる数値制御工作機械、制御プログラム及び記憶媒体を提供する。
【解決手段】制御装置のCPUは、加工ブロックの1ブロックを読み込んで解釈する(S1)。このS1の処理では、CPUは、タイミングテーブルを参照して、各指令の内容と、実行タイミングを読み取り、タイミング順に指令の内容を並び替えて、制御装置のRAMに記憶する。CPUは、指令が工具交換指令と判断した場合(S3:YES)、工具交換動作を開始する(S4)。ここで、CPUは、Z軸上昇処理を実行する。Z軸上昇処理は、主軸ヘッドが現在位置から工具交換位置(ATC原点)まで上昇する処理である。主軸ヘッド7がR点まで上昇した場合に(S5:YES)、S1の1ブロック読み取り処理でRAM73に記憶した指令の内容にタイミングAで実行する指令がある場合には(S6:YES)、当該タイミングAで実行する指令の内容を実行する(S7)。
(もっと読む)
複合機械加工の方法および装置
【課題】機械語命令を生成するための迅速な構成を可能にする。
【解決手段】コンピュータで使用可能な方法および装置は、ユーザインターフェース(150)のメニューを介した機械加工パターンの選択あるいは指示と工作機械の軸の向きの選択あるいは指示とによって、機械加工パターンと工作機械の軸の向きの様々な組み合わせを取り扱う。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
ロボット制御装置
【課題】ユーザ座標系を作業領域に応じて自動的に選択する場合、光電センサ等の導入が必要である。またはユーザ座標系の設定に加えて作業領域の複雑な設定が必要である。
【解決手段】アーム先端に取り付けられたツールを操作手段からの操作信号によりジョグ送りする際に、ツールが予め定められた作業領域に侵入したことを検知して、所定の軸方向を有するユーザ座標系を自動的に選択するロボット制御装置である。このロボット制御装置に作業領域自動設定手段を備える。すなわち、ユーザ座標系の原点Orを含んだ所定形状を有する領域を作業領域Qとして自動設定する。所定形状とは、原点Orを中心位置とした予め定めた半径長さDrを有する球体である(c)。または、予め定めた辺長さDx〜Dzを有する直方体である(b)。作業領域Qの中心位置となるユーザ座標系の原点は、シフトできるとさらに良い。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
41 - 60 / 335
[ Back to top ]