
Fターム[3C269SA07]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 制御対象を直接動かして教示するもの (162) | 教示専用作業具を有するもの (20)
Fターム[3C269SA07]に分類される特許
1 - 20 / 20
ロボット制御システム
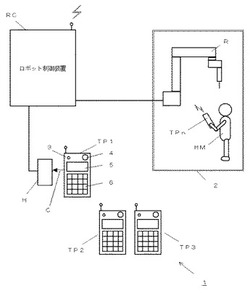
【課題】複数の可搬式操作装置を1台のロボット制御装置に同時接続した場合、教示機能が有効な可搬式操作装置を識別できない。
【解決手段】ロボット制御システム1は、ロボットRと、教示操作信号を送信する可搬式操作装置TPと、教示操作信号を受信してロボットRへの教示作業を行う教示機能を有する制御装置RCにより構成される。制御装置RCは、可搬式操作装置TPとの無線通信を確立する際に、可搬式操作装置TP毎に教示機能を有効化又は無効化する通信確立手段を備える。可搬式操作装置TPは、無線通信の確立状態を示す通信状態表示灯3と、教示機能の有効/無効を示す非常停止スイッチ4とを備える。通信確立の際に、現在の接続数が0の時に前記教示機能を有効化し、1以上の時は無効化したモニタモードを選択する。可搬式操作装置TPの接続形態が表示されるので教示に使用できる装置を容易に判別できる。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法

【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
ロボットのティーチング装置及びティーチング方法
【課題】ロボットを操作するための専門知識を有していなくても作業ノウハウを正確に教示すること。
【解決手段】作業者の手に装着されるモーションキャプチャ2と、モーションキャプチャから送信される3次元座標データに基づき産業用ロボット4を制御する制御部31とを備え、制御部31は、予め定められたサンプリング間隔でモーションキャプチャの位置をサンプリングし、移動距離算出機能31aと、移動速度算出機能31b、および、産業用ロボットの保持部が、ロボットの動作基点設定機能31cで設定された動作基点から移動速度算出機能31bで算出された移動速度で、サンプリングされたすべてのサンプリング点に沿って移動するように、当該産業用ロボットをティーチングする産業用ロボット制御機能31dとを有する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び姿勢のずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置及びロボット装置の制御方法を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、閉じたときに錘形状となる把持ツメを手先に有するマニピュレータ1の手先を作業台上に設けられた位置基準部7に当接させることによって、位置合わせのための教示動作を行う。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
汎用ロボット移動教示装置
【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
姿勢可変型直接教示モジュール
【課題】一つの直接教示モジュールと複数の産業用ロボットとで直接教示システムを構築し、一つの直接教示モジュールで各産業用ロボットごとに教示可能とする。
【解決手段】複数の産業用ロボットには、各産業用ロボットのアーム先端部分に取り付け部2を設け、取り付け部2に固定されたアーチ状で矩形断面のレール1と、アーチ状のレール1に沿ってレール1上をスライドしてロール角を調整するスライダ4と、スライダ4の外円周上をスライドしてピッチ角を調整するスライダ3と、所望の姿勢角になったときスライダ3及びスライダ4の位置を拘束する固定用操作レバー7と、スライダ3に設けられ、教示ハンドル部の連結用板6の被係合部に着脱自在に係合する爪式ロック機構8とからなる姿勢調整機構部を設け、前記一つの直接教示モジュールには、力センサ10及び姿勢角センサ9を有する教示ハンドル部と教示情報生成部とを備えた直接教示システム。
(もっと読む)
ロボットシステム
【課題】操作性に富んだ複数のロボットにたいする教示装置を提供すること。
【解決手段】ポータブル・プログラミング・ターミナル20は、上記制御ユニット14とデータ接続されている。手動ガイド・デバイス30は、ロボット1の可動構造部2およびエンド・エフェクタ13の少なくとも一方に対して、自身を連結する連結手段を備える。手動ガイド・デバイス30は、ポータブル・プログラミング・ターミナル20とのワイヤレス通信チャンネルをセットアップするワイヤレス通信手段を有し、当該ワイヤレス通信手段は、手動ガイド・デバイス30上の第1トランシーバー・モジュールと、ポータブル・プログラミング・ターミナル20上の第2トランシーバー・モジュールと、を備える。
(もっと読む)
ロボット教示用治具
【課題】ボルトねじ込み前にねじ穴とナットランナーの位置合わせを迅速に実施することができるロボット教示技術を提供することを課題とする。
【解決手段】ロボット教示用治具10は、雄ねじ部20と軸部30と筒部40とからなる。また、筒部40にはナットランナー13のソケット部41を挿入することができる挿入部50が設けられている。加えて、挿入部50の中心は、雄ねじ部20の中心線51に合致するように配置されている。
【効果】挿入部50にナットランナー13のソケット部41を挿入するだけでナット14とナットランナー13の位置合わせを実施することができる。よって、ボルトねじ込み前にナット14とナットランナー13の位置合わせを迅速に実施することができるロボット教示用治具10を提供することができる。
(もっと読む)
作業ロボットと、ティーチング方法
【課題】作業ロボットを設置する作業の効率の低下を抑制し、効率よくティーチングできる、作業ロボット及びティーチング方法を提供することを課題とする。
【解決手段】ロボットアーム10に装着される溶接機20aを、ワークWkに対して作業可能な位置に配置したときの溶接トーチ24のヘッド位置情報をコントローラ30に教示する。そして、コントローラ30は、教示されたヘッド位置情報を、ワークWkの作業部位を示す作業位置情報として、ティーチングデータを作成することを特徴とする作業ロボットとした。
(もっと読む)
ロボット装置の教示方法及びロボット装置の教示用治具
【課題】ロボット装置の構成の複雑化や大型化を招来することがなく、また、教示動作のための専用のキャリブレーションツールが不要であって、教示動作のたびに微小な位置及び傾きのずれが生ずることがなく、かつ、迅速な教示動作を可能とするロボット装置の教示方法及びロボット装置の教示用治具を提供する。
【解決手段】把持部材9をマニピュレータ1によって把持して平面部11を基準平面10に倣わせて基準平面10の位置を検出し、円筒部12を基準円筒体6に嵌合させて基準円筒体6の位置及び傾きを検出し、把持部材9を回転止め部材7により阻止されるまで軸回りに回転させて基準円筒体6回りの回転角を検出し、これらに基づいて、基準平面10、基準円筒体6及び回転止め部材7との相対位置及び傾きが既知である対象ワークの位置及び傾きとマニピュレータ1との相対位置及び傾きを求める。
(もっと読む)
ロボットのダイレクトティーチ制御装置
【課題】作業者がロボットと直動外部軸との間で制御対象を簡単且つ迅速に切換えれるようにする。
【解決手段】マスターコントローラ16は、第1の閾値以上の大きさを持つ外力が第1の規定時間以内で消滅する信号波形を一定時間以内に2回にわたって判定すると、ロボット1及び直動外部軸11のうち現在の制御対象としている一方を制御対象外とすると共に現在の制御対象外としている他方を制御対象として切換え、第2の閾値以上の大きさを持つ外力が第2の規定時間以上にわたって継続する信号波形を判定すると、その第2の閾値以上の大きさを持つ外力が力学センサ10に付与されている期間において現在の制御対象に対してダイレクトティーチ制御を行う。
(もっと読む)
レーザ溶接方法、この溶接方法によって形成された溶接物、およびレーザ溶接システム
【課題】レーザ溶接の工程時間を短縮する。
【解決手段】レーザ照射装置を停止させる際に、移動途中の減速域A2−A3で溶接点へ向けてレーザ照射を開始し、レーザ照射を継続させつつレーザ照射手段を停止させ、停止後の区間A3−A4で所定の加工パターンの溶接を行い、さらに増速区間A4−A5でもレーザ照射を継続する。
(もっと読む)
教示装置
【課題】部品と治具間の取付け上の互いの寸法公差が厳密に規定されていても目視で教示作業を行うために生じる教示位置の公差外れや部品や治具の破損を防止すると共に、部品を所定の力で押し付けながら組立作業を行う場合の力パラメータを数値で手入力する必要がない教示装置を提供する。
【解決手段】回転体の回転量を被操作対象の移動量とする操作部と、回転体の回転量及び回転方向を検出するセンサ120と、センサの検出値に基づいた被操作対象の移動量を指示する操作量指示部151と、被操作対象の特定方向の移動を規定する移動軸を選択する操作軸選択スイッチ140と、当該被操作対象が移動した位置を保存することを指示する教示ボタン130と、被操作対象が受ける反力を操作者に力覚提示するためのアクチュエータ110とを備えた教示装置である。
(もっと読む)
制御装置及び制御方法
【課題】教示作業時における作業者の負担を軽減し、作業者の安全性を確保することができるロボットの制御装置を提供すること。
【解決手段】本発明の一態様に係る制御装置1は、ロボットアーム30に対する命令を入力する操作ペンダント10と、操作ペンダント10に内蔵され、操作ペンダント10の加速度を検出する加速度センサ11と、加速度センサ11から所定値以上の加速度が入力された場合に、ロボットアーム30の動作を停止させる。
(もっと読む)
情報処理装置、情報処理方法
【課題】 ロボットの動作教示において、操作者にとって直感的に指示が行える技術を提供すること。
【解決手段】 操作入力部200は、ロボット500における可動部分の移動方向を制御するためにユーザが操作する操作盤から、制御対象の可動部分を移動させる方向を示す方向指示を取得する。操作者位置取得部300は、ユーザの視点の位置を取得する。操作座標変換部400は、視点の位置から方向指示による方向への移動ベクトルを、ロボット500を基準として定義される座標系における移動ベクトルに変換する。そして、操作座標変換部400は、変換後の移動ベクトルに従って、制御対象の可動部分を移動させる為の指示を、ロボット500に対して出力する。
(もっと読む)
ロボットの直接教示装置
【課題】御点位置を誘導操作中に容易に変更することを可能とし、教示作業の操作性を各段に向上させるとともに、教示作業に要する時間を短縮できる実用的な直接教示装置を提供する。
【解決手段】多関節ロボット1の先端部に力センサ3を介して設けられた操作ハンドル4と、操作ハンドル4に加わる教示作業者の操作力を力センサ3によって検出し、操作力に応じて力制御によりロボット1を移動させる指令を出力する力制御部61を備えた制御装置60からなるロボットの直接教示装置であって、操作ハンドル4は、教示中に教示作業者がロボット1の制御点の変更量および方向を入力する制御点入力手段5を備え、制御装置60は、制御点入力手段5にて入力された変更量および方向に応じてロボット1の制御点設定を更新し力制御部61へ出力する制御点演算部64を備える。
(もっと読む)
基板処理装置に対する各種設定値の教示方法、教示用装置及びその校正治具
【課題】良好なティーチング精度を得ることのできるティーチング装置及びこれを用いたティーチング方法の提供。
【解決手段】まず、キャリアステージ6に、ウェハ撓み量チェックキャリア15と、校正用基板5の複数の反射板との距離Lを測定する複数個の変位センサ10a〜10eを備えるティーチング治具11と、をセットする。ロボットハンド3によって校正用基板5をウェハ撓み量チェックキャリア15内の所定の校正開始位置に収容し、ティーチング治具11の変位センサ10a〜10eから読み出される距離を合わせることによって、キャリアステージ6の水平出し及び基板収容高さ位置の教示を実行する。最後に、ロボットハンド3をθ軸、X軸に移動させ、変位センサ10a〜10dによるウェハエッジ検出を行い基板収容位置の校正と、変位センサ10eによる撓み測定を行いロボットハンドの挿入高さ位置の教示を実行する。
(もっと読む)
作業用ロボットの教示データ作成装置
【課題】ロボットに搭載した三次元スキャナのデータに基づいて教示データを短時間かつ高精度に自動的に作成し得る作業用ロボットの教示データ作成装置を提供する。
【解決手段】作業用ロボットに付帯して設置された三次元スキャナと、該三次元スキャナで読み取ったデータを処理する演算装置を備え、演算装置は、三次元スキャナのスキャンにより得られるワーク平面の点群データと、該スキャン時の作業用ロボットのアームの位置情報とを取得し、これら両情報を演算処理して教示データを作成することを特徴とする。前記制御装置は、ワークが所定の大きさの場合にワーク平面の点群データを複数回取得しこれら複数の点群データを合成処理して1つの点群データとしたり、前記点群データに重複部分がある場合に予め設定した条件により間引き合成処理する。
(もっと読む)
1 - 20 / 20
[ Back to top ]