
Fターム[3D020BA20]の内容
車両外部の荷台、物品保持装置 (29,633) | 対象物品 (11,222) | 撮影カメラ (1,729)
Fターム[3D020BA20]に分類される特許
41 - 60 / 1,729
居眠り抑制システム及びダンプトラック
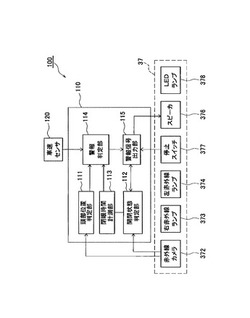
【課題】居眠りの誤検知を抑制可能な居眠り抑制システム及び居眠り抑制システムを備えるダンプトラックを提供する。
【解決手段】居眠り抑制システム100は、制御部110を備える。制御部110は、閉眼継続時間が第1閾値以上第2閾値未満の場合に予備警報信号を出力し、予備警報信号の出力中に運転者の眼が開いていると判断された場合に、予備警報信号の出力を停止する。
(もっと読む)
車両用補機の取付け構造

【課題】フロントガラスに複数の車両用補機が取り付けられる場合において、これらの補機による前方視界の悪化を抑制することができる車両用補機の取付け構造を提供する。
【解決手段】車両1のフロントガラス4の車幅方向中央部の上部に取り付けられた複数の車両用補機30,40,50と、該複数の車両用補機を一括して車室内側から覆うカバー60と、を設けて、前記複数の車両用補機のうち上下方向の寸法が最も小さい車両用補機40を、残りの車両用補機30,50に比べて車幅方向運転席側に配設し、前記カバー60について、前記車幅方向運転席側に配設された車両用補機40を覆う部分の上下方向の寸法Laを前記残りの車両用補機30,50を覆う部分の上下方向の寸法Lb,Lcよりも小さくする。
(もっと読む)
カメラ付スキーロボット
【課題】
赤外線対人検知式自動追尾型カメラを支持し、ラジオコントロール操作により、被写体スキーヤーと共に滑りながら、優れた映像を撮影することを可能とした、スキーロボットを提供する。
【解決手段】
駆動装置を内蔵する箱型のケース本体の底部には、先端が筒体となっている左右それぞれ2本の足を設け、スキー板の上面に固定されている棒状の門型支持具の水平部の棒体が前記筒体に回転自在に貫通し、該水平部の棒体の中央部から、頂部に筒部を形成する垂直支持体を垂設し、前記ケース本体の上方側面を貫通する貫通孔に貫通するコの字状の棒体が前記筒部に回転自在に嵌合し、前記ケース本体の上部に、赤外線対人検知式自動追尾型カメラを設けるとともに該ケース本体の後方部に先端が鋸刃状の鍬状体を設けてなるカメラ付スキーロボットとして課題を解決している。
(もっと読む)
視線方向検出装置
【課題】輻輳が発生しないときの範囲にまでキャリブレーション用の情報を収集する範囲を広げ、より正確なキャリブレーションを、運転者に負担なく行わせることができる視線方向検出装置を提供する。
【解決手段】ODOメータリセットボタンの操作や、ガソリン残量が減少の警報があるとき、運転者はODOメータやガソリン表示を見ており、このとき輻輳が発生している。また、一定速度以上、かつ、前方車両と一定距離離れて走行しているときに最初にブレーキが操作されとき他車両を見ており、このとき輻輳は発生していない。この視線方向検出装置では、輻輳が発生しているときも(S322,S342,S362)輻輳が発生していないときも(S384)、自動的にキャリブレーション情報を取得してキャリブレーションを行っているので、正確な視線方向の検出ができる。
(もっと読む)
車載表示装置
【課題】小型で簡素な駆動機構により、プロジェクタによる画像の投影箇所を広い範囲に変更することができる車載表示装置を提供する。
【解決手段】異なる色のビーム光を発する複数の半導体レーザを有し、該半導体レーザからのビーム光を走査して画像を投影するプロジェクタ5を備え、複数の半導体レーザは夫々3色のビーム光の1つを発するものであり、プロジェクタ5の姿勢を変更する姿勢変更機構4と、姿勢変更機構4を駆動制御する姿勢制御手段とを備えている。姿勢変更機構4はプロジェクタ5を保持するための保持部として止めネジ7と止めネジ7を挿通させる貫通孔4B1aとを有し、プロジェクタ5は保持部4B1a,止めネジ7に脱着自在な被保持部としてネジ穴5aを備えている。
(もっと読む)
被害軽減制動装置及び方法
【課題】自車両が相手車両の側面に衝突するときの角度に応じて、衝突回避システムが衝突回避動作時に行う制御内容を異ならせる被害軽減制動装置を提供する。
【解決手段】ステップS103及びS104において自車両が相手車両の側面に衝突すると予測される場合、自車両の進行方向軸と相手車両の側面とのなす角である衝突面角度が算出される(ステップS105)。予め保持されている制限係数マップから、算出された衝突面角度に予め割り当てられている制限係数を読み出して、読み出された制限係数が衝突回避の制動制御時に使用される制限係数に決定される(ステップS106)。衝突回避システムが衝突回避動作時に本来適用している減速Gに、この決定された制限係数が乗算されて新たな減速Gが求められる(ステップS108)。求められた新たな減速Gに従って、ブレーキの制動力等が制御される(ステップS109)。
(もっと読む)
接近車両検出装置
【課題】走行音に基づく接近車両検出が適切な状況でのみ作動する接近車両検出装置を提供することを課題とする。
【解決手段】走行音に基づいて接近する車両を検出する接近車両検出装置1Aであって、照度情報を取得する照度情報取得手段10と、照度情報に基づいて接近車両検出を作動させるか否かを判定する判定手段21Aとを備えることを特徴とし、更に、運転者の視線情報及び姿勢情報の少なくとも一つの情報を検出する検出手段を備え、運転者の視線情報及び姿勢情報の少なくとも一つの情報に基づいて接近車両検出を作動させるか否かを判定する構成としてもよい。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】バンクの競合を回避しながらメモリを検査する。
【解決手段】画像表示システムでは、表示装置の表示モードに、撮影画像を表示するバックモニタモードと、撮影画像以外の非撮影画像であるナビ画像を表示するナビゲーションモードとがある。画像書込部61は、バックモニタモードとナビゲーションモードとの双方において書込バンクに撮影画像を周期的に書き込む。また、画像読出部62は、バックモニタモードのみにおいて、書込バンクとは異なる読出バンクから撮影画像を周期的に読み出す。一方、メモリ検査部63は、ナビゲーションモードのみにおいて、書込バンクとは異なる被検査バンクを検査する。したがって、メモリ検査部63は、読出バンクを考慮せずに被検査バンクを選択できるため、バンクの競合を回避しながらフレームメモリ45を検査することができる。
(もっと読む)
カメラユニットおよびドライブレコーダ
【課題】本体部との配線を車輌内で目立たせずに車輌へ取付けることが容易なカメラユニットを提供することを目的とする。
【解決手段】本発明のカメラユニット10は、GPS情報を受信するGPSアンテナ11と、このGPSアンテナ11と接続した同軸ケーブル13と、この同軸ケーブル13と接続し、GPSアンテナ11から得たGPS情報を本体部1に送信するGPSモジュール12とを備え、GPSアンテナ11とGPSモジュール12とを一体に設けたことを特徴とする。
(もっと読む)
駐車支援装置
【課題】駐車時の進行経路を予測する上で操舵角を検出するセンサを不要とし、センサ接続によるハーネス及び配線作業のコストを削減する。
【解決手段】カメラより画像を取得して2値化等の前処理を行い(S1,S2)、2値化した画像より前輪を検出する(S3)。そして、画像中の前輪の形状或いは輪郭と予めシステム内に記憶されている前輪のパターンとを照合し(S4)、パターン照合結果に基づいて操舵角を算出する(S5)。次に、操舵角に基づいて自車両の進行経路を推定し(S6)、予測進路軌跡のガイドラインを生成してディスプレイに表示する(S7)。これにより、舵角センサからの信号を用いることなく操舵角を認識して自車両の進行経路を推定することができ、舵角センサを接続するためのハーネスと配線作業に要するコストを削減しつつ、駐車時のドライバの運転操作を支援することができる。
(もっと読む)
走行経路生成装置、及び走行経路生成方法
【課題】走行履歴を構成する場合と走行経路を生成する場合とで車両MMの進行方向に大きな変化があっても、より確実に自己位置を推定して経路生成を可能とすることを目的としている。
【解決部】少なくとも車両前方及び車両前方をそれぞれ個別に撮像可能な2以上のカメラ2で、少なくとも車両前方及び車両前方を個別に撮像すると共に、その各撮像画像を撮像したときのカメラ位置及び撮像方向角を関連付けて蓄積画像として蓄積しておく。そして、本発明は、撮像方向角及びカメラ位置に基づき上記蓄積画像を照合して、カメラ2が撮像する撮像画像と画像の重なりが相対的に大きいと推定される蓄積画像を選択し、上記選択された蓄積画像と上記カメラ2が撮像する撮像画像とに基づき自車位置を推定し経路を生成する。
(もっと読む)
車両の運転支援装置
【課題】自車周辺の俯瞰画像と、自車前方走行路の鳥瞰画像とを、モニタ画面に表示して、運転者が狭小路であっても容易にこれを通過し得るよう支援する装置を提供する。
【解決手段】(a)は、狭小路における自車10と、道路境界21,22と、電柱23,24との位置関係を上方から見て示し、(b)は、自車10が狭小路内で (a)のような道路幅方向右寄り位置に居る時のモニタ画面5を示す。モニタ画面5には、下半分に自車周辺の俯瞰画像を、また上半分に自車前方走行路の鳥瞰画像を表示し、更に、左右ドアミラーの外端を通って画面に沿って上下方向へ垂直な自車通過幅表示線54,55を表示する。自車が(a)のような右寄り位置に居る場合、直進時に、最幅狭部を構成する電柱24と接触して通過不能であることが、(b)のモニタ画面5上における自車通過可能幅表示線55と電柱24の画像との相対位置から容易に把握することができる。
(もっと読む)
映像処理回路および映像表示装置
【課題】直射日光を受けつつも表示映像の視認性を確保する必要性の高い場面において、確実に視認性を確保すること。
【解決手段】パラメータ取得部が、補正前映像の映像種別に応じた直射補正情報を取得したうえで、直射補正部およびブレンド部に対してパラメータとして通知し、直射補正部が、かかるパラメータを用いて補正前映像を補正し、ブレンド部が、かかるパラメータを用いて補正後映像と補正前映像とを合成するように映像処理回路を構成する。
(もっと読む)
運転支援装置および車両
【課題】Uターン開始後にも運転者の心理負担の増大を抑制する運転支援装置および車両を提供することを目的とする。
【解決手段】運転支援装置1は、入力された自車両周辺の撮像画像を記憶する第1記憶手段9と、この第1記憶手段9に記憶した撮像画像に基づいて自車両が切り返しをせずにUターン可能であるか否かを示すガイド画像を表示手段8に出力する画像処理手段11とを備え、画像処理手段11は、自車両がUターン動作開始前に、前方とUターン方向の側方を含む第1のガイド画像を表示手段8に出力し、自車両がUターン動作開始後に、前方とUターン方向と逆の側方を含む第2のガイド画像を表示手段8に出力することを特徴とする。
(もっと読む)
物体検出装置、および、物体検出方法
【課題】撮影画像中の物体の物体像を確実に検出することを目的とする技術に関する。
【解決手段】
撮影画像に基づいて、カメラの光軸の実際の方向を示す情報を導出し、カメラの光軸の基準の方向を示す情報とカメラの光軸の実際の方向を示す情報との差に応じて、撮影画像中において検出領域とする範囲を変更する。これにより、物体の物体像の検出領域を撮影画像中の適正な範囲に設定でき、検出対象とすべき物体の物体像を確実に検出できる。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
車載カメラ
【課題】フロントガラスの傾斜角度が変化しても映りこみが生じにくい車載カメラを提供すること。
【解決手段】筐体3の上面5にレンズ15が露出し、前記上面5がフロントガラス101に対向するように車室内に取り付けられる車載カメラ1であって、前記上面5は、前記上面5を通る稜線7において山状に屈曲した形状を有し、前記レンズ15は、前記稜線7付近に位置することを特徴とする車載カメラ1。前記レンズ15の光軸が前方を向き、前記上面5が前記フロントガラス101に対向するように前記車載カメラ1を取り付けたとき、前記稜線7は、前記フロントガラス101の傾斜方向と直交する直線である。
(もっと読む)
視線検出装置および視線検出方法
【課題】視線検出装置の検出精度を容易に確認することができる技術を提供
【解決手段】まず運転者の視線を検出し(S20)、その後に、視線検出結果に基づいて、運転者の視線上にナビ表示画面が位置しているか否かを判断する(S60)。そして、運転者の視線上にナビ表示画面が位置している場合に(S60:YES)、ナビ表示画面上において運転者の視線とナビ表示画面とが交差する位置に、運転者の視線検出結果であることを示す視線位置指示画像を表示する(S70)。したがって、運転者がナビ表示画面を見ているときに、運転者の視線検出結果がナビ表示画面に表示される可能性が高い。そして、運転者がナビ表示画面を見ているときに視線位置指示画像が表示されると、運転者は、自身が現時点で実際に見ている表示画面上の位置と、視線位置指示画像が表示されている表示画面上の位置とを比較することができる。
(もっと読む)
ルームミラー型撮像装置
【課題】複数のカメラを装備することなく、1台のカメラで車室内外を同時に撮像することが可能なルームミラー型撮像装置を提供する。
【解決手段】車両V室内に設けられるミラー本体2に、ミラー本体2の車両Vを運転する運転者に対向する面に光線を透過及び反射するハーフミラー3と、ミラー本体2のハーフミラー3を設けた面とは反対側の面に光線を透過する透過部材4と、ミラー本体2にハーフミラー3と透過部材4を透過した光線を撮像する撮像手段5とを設けたものである。
(もっと読む)
顔撮影システム
【課題】光を照射する投光器にユーザが接近した場合にユーザの目に対する負担を軽減できる顔撮影システムを提供すること。
【解決手段】ユーザの顔を撮影するカメラは投光器に物体が接近した場合にボケが生じるレンズ構造を備えている。顔撮影システムは、投光条件、露光条件を設定し(S11、S12)、カメラが撮影した撮影画像を取得し(S13)、その撮影画像から顔領域の認識を試みる(S14)。認識できた場合には(S15:Yes)、撮影画像中の顔領域や構造物の構造物領域のエッジ情報を抽出する(S16〜S18)。顔領域のエッジ情報を構造物領域のエッジ情報で正規化する(S19)。正規化後のエッジ情報が所定の閾値未満か否かを判断する(S20)。エッジ情報が閾値未満の場合には(S20:Yes)、顔領域にボケが生じているとして、投光器からの光の照射を停止させ又は減光させる(S21)。
(もっと読む)
41 - 60 / 1,729
[ Back to top ]