
Fターム[3D041AA66]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 制御の安定性、応答性の向上 (443)
Fターム[3D041AA66]の下位に属するFターム
Fターム[3D041AA66]に分類される特許
1 - 20 / 370
車両の制御装置
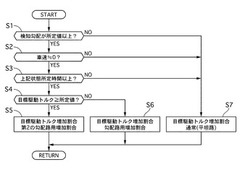
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
車両制御装置

【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
走行支援装置及び方法
【課題】車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速との調和を図り、車輌を安定的に走行させる技術を提供する。
【解決手段】車線境界を示す道路標示又は走行不可域を基準にして車輌の走行可能な走路を設定し、当該走路からの車輌逸脱時に、車輌を走路内で走行させるように補助を行う走行支援装置であって、車輌が走路を超えないための目標ヨーレートYtrgよりも実際のヨーレートYreaが小さい場合にその差△Yに応じて、車輌を走路内で走行させるように補助を行う際の車輌の操舵と車速の減速とを個別に制御する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び車両運動制御の両方について実行の要否を判定し優先順位の高い方の制御を選択する必要性や頻度を低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の前後力を制御することにより車両の旋回運動を安定化させる車両運動制御とを行う車両の走行制御装置。旋回補助制御の許可車速域は車両運動制御の許可車速域よりも低く設定されている。特に旋回補助制御の許可車速域の下限値は車両運動制御の許可車速域の下限値Vvscよりも低い。或いは旋回補助制御の許可車速域の上限値Vtaはオーバーステア抑制制御の許可車速域の下限値Vspよりも高いが、旋回補助制御の許可車速域の下限値はオーバーステア抑制制御の許可車速域の下限値Vspよりも低い。
(もっと読む)
コーストストップ車両及びコーストストップ方法
【課題】ベルト式無段変速機構(バリエータ)を備えた車両において、コーストストップ実行時のベルト滑りを抑制する。
【解決手段】
コントローラ12は、コーストストップ条件の成否を判断し、コーストストップ条件が成立したと判断された場合に、Lowブレーキ32への供給油圧を低下させ、Lowブレーキ32に供給される油圧を低下させた後にエンジン1及びメカオイルポンプ10mを停止させ、これによってLowブレーキ32への供給油圧をさらに低下させてLowブレーキ32を解放する。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、クラッチを用いた動力伝達モードの切替えを好適に行う。
【解決手段】ハイブリッド車両の制御装置(100)は、第1電動機(MG1)、第2電動機(MG2)及び内燃機関(200)を含む動力要素と、駆動軸(500)と、第1回転要素(S1)、第2回転要素(R1)、第3回転要素(C1)を有する動力伝達機構(300)と、第1クラッチ(710)と、第2クラッチ(720)とを備えたハイブリッド車両を制御する。ハイブリッド車両の制御装置は、第1クラッチ及び第2クラッチを制御する切替手段(160)と、第2クラッチを結合させる第1制御手段(120)と、内燃機関の回転数を推定する回転数推定手段(130)と、推定された回転数が所定の閾値未満である場合に、内燃機関が起動していない状態で第1クラッチを結合させる第2制御手段(140)とを備える。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
制駆動力制御装置
【課題】車両がコーナを脱出する際のエンジンブレーキや回生ブレーキ等による無駄な減速を抑制し、なおかつ想定以上に下がってしまった車速を回復する際の無駄なエネルギー消費を抑制するために、車両の減速度を徐減することができる制駆動力制御装置を提供することを課題とする。
【解決手段】ECUは、車両のカーブ脱出時に、車両の非旋回時用に設定された減速度である非旋回減速度より小さくなるまで、車両の減速度を減少させる。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両の制振制御装置
【課題】 駆動出力制御による制振制御に於いて、エンジンのスロットル弁の可動部の摩耗などの特性の変化を管理し、その過度な進行を回避すること。
【解決手段】 本発明の車両の駆動出力を制御してピッチ又はバウンス振動を抑制する制振制御装置であって、車両の車輪と路面との接地個所に於いて発生する車輪トルクに基づいてピッチ又はバウンス振動振幅を抑制するようエンジンの駆動トルクを制御する制振制御部と、エンジンのスロットル弁の可動部の摩耗状態量などの特性の変化に基づいて、制振制御部により算出される制振制御のための車輪トルクを補償する補償成分の大きさを変更する補償成分調節部とを含み、スロットル弁可動部の特性の変化の過度な進行を抑制する機能を有する。また、車両の走行中に、スロットル弁可動部の特性の変化状態を推定する新規な構成が提供される。
(もっと読む)
走行制御装置および走行制御方法
【課題】車両を自律走行させる場合に車両の搭乗者に与える不快感を軽減できる走行制御装置および走行制御方法を提供すること。
【解決手段】車両1を自律走行させると、運転者を含む搭乗者に前触れもなく、突然切り返しが行われる場合があり、予測の困難な前後Gが車両1の搭乗者に加わることがある。本実施形態の走行制御装置100は、車両1の前進および後退を切り換える切り返し地点に車両1が到着する場合に、車両1の車両速度Vに基づいてクッションタイムを設定する。クッションタイムが設定されると、切り返し地点において車両1が所定時間停車させられるので、車両1が停車している間に、車両1の搭乗者に加わっている前後Gを緩和させることができる。よって、車両1の搭乗者に与える不快感を軽減できる。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
変速制御装置
【課題】この発明は、エンジンと自動変速機の同調性を確保すること、通信する他の制御装置との通信を不都合なく両立することを目的とする。
【解決手段】この発明は、変速制御装置において、エンジン水温検出手段によって検出されたエンジン水温と変速機油温検出手段によって検出された変速機油温とを入力可能に設け、エンジン水温−変速機油温に基づく遅延時間のマップを、セレクタ装置で人為的に選択されたシフトポジションの変更パターンのうちニュートラルレンジ−前進レンジとニュートラルレンジ−後退レンジとにそれぞれ予め設定し、セレクタ装置で実際に人為的に選択されたシフトポジションの変更パターンと検出されたエンジン水温と変速機油温とから遅延時間をマップで設定した際には、セレクタ装置からの出力信号の情報を設定された遅延時間だけ遅延して他の制御装置のうちのエンジン制御装置に通信するよう制御することを特徴とする。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
1 - 20 / 370
[ Back to top ]