
Fターム[3D041AD02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | 機関軸回転数、出力 (992)
Fターム[3D041AD02]の下位に属するFターム
加減速度、変化割合 (37)
Fターム[3D041AD02]に分類される特許
141 - 160 / 955
作業車の走行制御装置
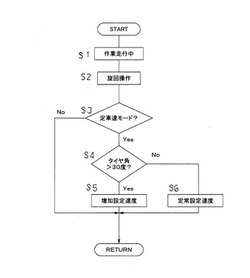
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
ハイブリッド車両の制御装置

【課題】ハイブリッド車両において、ロック機構の誤解放状態に起因するモータジェネレータの過回転の発生を防止する。
【解決手段】ハイブリッド車両(10)の制御装置(100)は、走行モードとして無段変速モードが選択される場合には、ロック機構(400)が解放状態となるように、且つ、走行モードとして固定変速モードが選択される場合には、ロック機構が係合状態となるように、ロック機構を制御するロック制御手段(110)と、走行モードとして固定変速モードが選択されている場合において、モータジェネレータの回転速度が所定回転速度以上変化したときには、内燃機関(200)の機関回転速度を抑制する回転速度抑制制御を行う回転速度抑制手段(130)とを備える。
(もっと読む)
車両制御装置
【課題】車両の停車時において、エンジンから発生する熱量を増大させることが可能な車両制御装置を提供する。
【解決手段】エンジンと、エンジンから入力された駆動力を変速して出力可能な変速機と、エンジンの出力軸と変速機の入力軸とを係合可能なクラッチと、を備えた車両を制御可能な車両制御装置において、エンジン負荷を検出可能なエンジン負荷検出手段と、車両の停車時において、検出されたエンジン負荷が目標エンジン負荷となるように、クラッチの係合状態を制御可能なクラッチ制御部と、を備えた。
(もっと読む)
燃費走行制御時の補助制御装置
【課題】惰行制御時のエンジン回転数の低下に伴うエンジン騒音の変化を低減し、惰行制御時にドライバーが感じる違和感の低減を図った燃費走行制御時の補助制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落として惰行制御する燃費走行制御を行う走行体に搭載される燃費走行制御時の補助制御装置であって、前記惰行制御でエンジン回転数をアイドル回転数に落としたときに、その惰行制御前のエンジン騒音を発生させるエンジン騒音発生手段13を備えたものである。
(もっと読む)
車速制御装置
【課題】信号機をなるべく停止せずに通過し、燃費の向上や交通渋滞などの緩和をはかる車速制御装置を提供する。
【解決手段】車両の前方の交通信号の表示が切り替わるタイミングに応じて車速を制御する車速制御装置23において、前記交通信号が通行許可表示に切り替わるまでの時間を検出する検出手段43と、その検出手段43で検出された前記時間に、前記交通信号が停止表示である場合に車両が停止すべき位置を表示している停止位置から所定距離手前の位置を通過する際に前記交通信号の停止表示が通行許可表示となる最大車速Vfを求める車速算出手段23と、前記車速算出手段23で算出された車速を指示する車速指示手段51とを備えている。
(もっと読む)
車両の運転支援装置
【課題】道路の状況に応じて適切にオートクルーズコントロールを実施することができる運転支援装置を提供する。
【解決手段】少なくとも1つの駆動源により走行可能な車両の運転支援装置は、自車両の現在位置に基づく走行区間情報を取得する走行区間情報取得部と、前記走行区間情報に対応する他車両の走行情報を取得する他車両情報取得部と、前記他車両の走行情報に基づいて判定値を設定する判定値設定部と、前記判定値に基づいてオートクルーズコントロールの実施を判定するオートクルーズコントロール実施判定部と、を備える。
(もっと読む)
車両の制御装置および制御方法
【課題】補機の作動開始時の車両の加速および燃費の悪化を抑制する。
【解決手段】ECUは、定常走行中であって(S100にてYES)、補機作動中に(S102にてYES)、ガード値Eを設定するステップ(S104)と、今回のスイープアップ量SWP(I)を算出するステップ(S106)と、SWP(I)がガード値Eよりも小さい場合に(S108にてNO)、SWP(I)を最終的なスイープアップ量SWPとして更新するステップ(S110)と、SWP(I)がガード値以上である場合(S108にてYES)、ガード値Eを最終的なスイープアップ量SWPとして更新するステップ(S112)と、第3の要求量を算出するステップ(S114)と、算出された第3の要求量に基づいてCVTを制御するステップ(S116)とを含む、プログラムを実行する。
(もっと読む)
惰行制御装置
【課題】惰行制御状態のまま車速が増加又は減少し一定以上に達して、車両の減速・加速が遅れてしまう状況の発生を防止する。
【解決手段】車両に搭載されるエンジンが車両の走行に寄与する仕事をしないときに、エンジンと車両の駆動輪との間に介設されるクラッチ51を断にすると共に、エンジンをアイドル状態にして車両を惰性走行させる惰行制御を行う惰行制御装置であって、アクセル開度及びクラッチのドリブン側回転数に基づく惰行制御開始条件が成立したときに、惰行制御を開始し、その惰行制御中にアクセル開度及びクラッチのドリブン側回転数に基づく惰行制御終了条件が成立したときに、惰行制御を終了する制御手段11、12を備え、制御手段11、12は、惰行制御中に惰行制御開始時の車速と現在の車速との差を求め、その差が所定のしきい値以上であるときに、惰行制御終了条件に拘らず惰行制御を終了する。
(もっと読む)
車両用駆動装置の制御装置
【課題】運転者に違和感を与えないようにしてベルト式無段変速機の可変プーリの偏磨耗を防止することができる車両用駆動装置の制御装置を提供する。
【解決手段】安定走行時制御手段162は、安定判定条件判断手段160により無段変速機18の変速比γ1が予め定められた安定判定条件を満足すると判断された場合には、その判断時を基準にエンジン回転速度NEに対する駆動輪回転速度NWHの比率を保つように前進用クラッチC1をスリップさせると共に変速比γ1を上記判断時よりも高車速側に変化させる変速比変更制御を実行し、更に、その変速比変更制御の実行による駆動力変化を打ち消すようにエンジン12の出力を制御する駆動力安定制御を実行する。従って、入力側可変プーリ42及び出力側可変プーリ46の偏磨耗を防止し、変速比γ1の変化が運転者に違和感を与えないようにすることができる。
(もっと読む)
車載無段変速機の制御装置
【課題】無段変速機を搭載した車両にあって、内燃機関の最大吸気量が減少した状態においても車両走行性能の低下を抑制することのできる車載無段変速機の制御装置を提供する。
【解決手段】ECU31は、吸気量を調量するリフト量可変機構19の吸気バルブの最大リフト量が所定リフト量(異常時最大リフト量)以上とならない異常が生じたとき、その異常に起因する機関トルクの低下を抑制すべく、異常時最大リフト量が小さいときほど低い値に設定される上限回転速度にてCVT23の入力軸回転速度Ninが制限されるようにその変速比を制御するようにした。
(もっと読む)
車両の制御装置
【課題】実際のエンジントルクに応じた態様でオートマチックトランスミッションなどを制御する。
【解決手段】ピッチングおよびバウンシングなどの車両の上下方向の振動を低減するトルクを出力するようにエンジンを制御する制振制御が実行される。制振制御を中断した場合、制振制御を中断した後のエンジントルクの挙動が予測される。予測されたエンジントルクの挙動に応じて、オートマチックトランスミッションの変速が制御される。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置であって、電動機接続状態の切り替えに係わる切り替え調整期間において、内燃機関の出力軸のトルク及び電動機の出力軸のトルクを適切に調整し得るものを提供すること。
【解決手段】この装置は、電動機出力軸の接続状態を、変速機の入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の3つの状態の何れかに選択可能な切替機構を備える。切り替え条件が成立すると、切り替え作動に関連する切り替え調整期間(t1〜t6)に亘って内燃機関側出力トルクTeと電動機側出力トルクTmとの和Tsが要求駆動トルクTrに一致するように且つ電動機トルクがゼロで推移する期間(t2〜t5)が設けられる。
(もっと読む)
車両用駆動力制御装置
【課題】フューエルカット制御の終了時におけるロックアップクラッチの解放前後の加速度の変動を抑制できる車両用駆動力制御装置を提供すること。
【解決手段】内燃機関と、補機と、スロットルバルブと、ロックアップクラッチ付きの流体伝達装置を有する自動変速機とを備えた車両の駆動力を制御する車両用駆動力制御装置であって、補機の駆動負荷は可変に設定可能であり、減速時に、スロットルバルブの開度を所定開度として燃料の供給を停止するフューエルカット制御、および、係合状態とされていたロックアップクラッチをフューエルカット制御の終了時に解放状態とするクラッチ制御(S40)を実行し、更に、フューエルカット制御の終了前にスロットルバルブの開度を所定開度よりも大きな開度とするポンピングロス低減制御(S20)と、フューエルカット制御の終了後に、終了前と比較して駆動負荷を増加させる駆動負荷制御(S90)とを実行する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、EV走行状態において回転中の変速機の入力軸の動力を利用して内燃機関を始動する場合においてドライバビリティの悪化を抑制できるものを提供すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びに、いずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。電動機駆動トルクTmのみで走行するEV走行状態にて内燃機関を始動する場合、クラッチを遮断状態から半接合状態に移行して変速機入力軸の動力により内燃機関の回転速度Neをゼロから増大させる。変速機出力軸が受ける車両減速方向の反トルク(−Te)を考慮して電動機駆動トルクTmを大きくする。
(もっと読む)
作業車の走行操作装置
【課題】エンジンと無段変速装置を連係させて調速操作できながら、発進を円滑に行え、エンジンストップを回避できる作業車の走行操作装置を提供する。
【解決手段】エンジンの調速装置50とアクセルペダル55とを駆動アーム23を介して連係する。駆動アーム23と無段変速装置30とを被動アーム24で連係する。アクセルペダル55の待機位置から高速側への始動操作時には、駆動アーム23と被動アーム24とは被連動状態に維持し、先行して調速装置50のみを高速側に操作してエンジン回転数をアイドリング回転数から所定回転数まで上昇させる。エンジン回転数が所定回転数に上昇した状態で、更に、アクセルペダル55への操作によって、調速装置50と共に無段変速装置30を停止位置から高速側に操作すべく構成してある。
(もっと読む)
車両の出力制御装置
【課題】潤滑通路の制御圧力の切り替えを行う内燃機関について、その燃料消費率の向上を図ることのできる車両の出力制御装置を提供する。
【解決手段】車両の出力制御装置は、機関潤滑部位に潤滑油を供給する潤滑通路に対するリリーフ圧力を機関回転速度及び軸トルクにより定められる機関運転状態に基づいて低圧側の第1リリーフ圧力と高圧側の第2リリーフ圧力との間で切り替えるエンジン10と、エンジン10の回転を変速する自動変速機30とを備える車両について、その出力を制御する。そして、要求出力が機関出力の増加方向の変化が生じたときに低圧時最小消費率及び高圧時最小消費率を比較し、低圧時最小消費率が高圧時最小消費率よりも小さいときにはリリーフ圧力を第1リリーフ圧力に設定するとともに自動変速機30及びエンジン10の制御により機関回転速度及び軸トルクを低圧時最小燃費率に対応するものに設定している。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】内燃機関の始動や運転停止が頻繁に行なわれるのを抑制する。
【解決手段】車速変化率ΔVが閾値ΔVref未満でアクセル変化率ΔAccが閾値ΔAref1より大きくなったときや車速変化率ΔVが閾値ΔVref以上でアクセル変化率ΔAccが閾値ΔAref2より小さくなったときには(S140〜S160)、それから所定時間tjrefが経過するまでは運転中のエンジンの運転停止や運転停止中のエンジンの始動は行なわずに走行し(S190,S320〜S400,S250,S260)、所定時間tjrefが経過した以降はアクセル開度Accに応じてエンジンを間欠運転しながら走行する(S210〜S310,S380〜S400)。これにより、エンジンの始動や運転停止が頻繁に行なわれるのを抑制することができる。
(もっと読む)
電動車両の制御装置
【課題】摩擦締結要素のスリップ締結を抑制しつつ摩擦締結要素の耐久性低下を抑えると共に、ライン圧の補正精度を高めて過剰なライン圧設定を防止する。
【解決手段】走行駆動源の電動機と、電動機と駆動輪との間の動力伝達経路上に設けられた摩擦締結要素とを有し運転状態に応じて、ライン圧を必要最小限の値に設定する電動車両制御装置において、最小ライン圧設定手段は、摩擦締結要素のスリップ締結状態を検出するスリップ検出手段(ステップS1)と、摩擦締結要素のスリップ締結状態が検出されたときに、電動機の回転数制御を実行して前記スリップ締結状態を抑制するスリップ抑制手段(ステップS2)と、スリップ抑制手段(ステップS2)による電動機の回転数制御に伴って生じる摩擦締結要素への入力トルク変化量(クラッチ入力トルク補正量)ΔTinに基づき、ライン圧を学習補正するライン圧学習補正手段(ステップS5〜ステップS7)と、を備えた。
(もっと読む)
車両制御装置
【課題】 坂路における車速制御の応答性を高めることができる車両制御装置を提供する。
【解決手段】 各車輪FL,FR,RL,RRに制動力を発生させるホイルシリンダW/Cと、路面の勾配を検出するコンバインセンサ33と、路面勾配に応じた駆動力を演算し、設定された制御目標速度になるように前輪FL,FRに対して駆動力を作用させる速度制御中であって、路面勾配とは別の路面状態(路面μ)に応じて演算された制動力を発生させ、車輪の回転速度を制御する液圧ユニット31と、液圧ユニット31をコントロールするブレーキCU32と、を備えた。
(もっと読む)
車両用駆動装置
【課題】駆動力源の切換制御と変速制御とが重複する同時切換が生じる場合に、運転者の出力要求量の変化に対する駆動力変化の応答性の悪化を抑制しつつ、同時切換に起因してショックが発生することを防止する。
【解決手段】アクセル操作変化率Δθacc が正の所定値A以上の加速要求時に、駆動力源切換制御と変速制御とが重複する同時切換になるか否かを予測し(S1〜S3)、同時切換になることが予測されると、駆動力源切換マップのM→E切換線に従う本来の駆動力源切換に先立って、モータ走行からエンジン走行に切り換えるためにエンジン10の始動制御を開始する(S4)。このため、駆動力源の切換制御と変速制御とがずれて実施されるようになり、同時切換に起因するショックの発生が抑制されるとともに、エンジン走行への切換制御を本来の制御開始よりも先行して実施するため、運転者の加速要求に対する駆動力変化の応答性が向上する。
(もっと読む)
141 - 160 / 955
[ Back to top ]