
Fターム[3D041AD02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | 機関軸回転数、出力 (992)
Fターム[3D041AD02]の下位に属するFターム
加減速度、変化割合 (37)
Fターム[3D041AD02]に分類される特許
81 - 100 / 955
車両走行制御システム
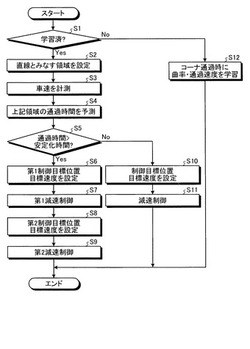
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
無段変速機及びその制御方法

【課題】バリエータと副変速機構を有し、副変速機構の変速に合わせてバリエータの変速比を副変速機構の変速比の変化方向と逆に変化させる協調変速を行う無段変速機において、協調変速中にプーリへの供給圧が不足してもベルト滑りを抑制できるようにする。
【解決手段】変速機コントローラ12は、協調変速中、プーリへの供給圧が不足していると判断された場合、バリエータ20の伝達可能なトルクであるバリエータ伝達可能トルクをプーリへの供給圧とバリエータ20の変速比とに基づき演算し、バリエータ20の出力側から入力されるイナーシャトルクをバリエータ20の出力軸の回転速度変化に基づき演算する。そして、変速機コントローラ12は、バリエータ伝達可能トルクとイナーシャトルクとに基づきエンジン1の上限トルクを演算し、演算した上限トルクをエンジンコントローラに出力してエンジン1のトルクを規制する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】特に新たな機構等を設けることなく、不要な減速感による走行フィーリングの悪化を招くことがなく、路外逸脱防止のためのヨーモーメントを適切に発生する。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、交差角αと第1の逸脱量yLと第2の逸脱量ySに応じて障害物や白線に対する車両の逸脱を防止するのに必要な必要モーメントMを算出し、この必要モーメントMに応じてトルクアップ基準値Tsを設定し、車速V0に応じて設定するトルクアップ補正ゲインGtで補正してトルクアップ量ΔTを求め、エンジン制御装置11に出力する。
(もっと読む)
車両の制御装置
【課題】燃費を向上させると共に、ロックアップクラッチの係合時のショックの発生を抑制することが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、トルクコンバータと、エンジンと、電動機と、ロックアップクラッチ係合手段と、エンジン回転数調整手段と、燃料噴射制御手段と、を備える。トルクコンバータはロックアップクラッチを有する。ロックアップクラッチ係合手段は、アクセル開度の低下に応じてロックアップクラッチの係合を行う。エンジン回転数調整手段は、アクセル開度の低下に基づくエンジン回転数の低下勾配を、電動機によりトルクをエンジンへ付与することにより緩やかにする。燃料噴射制御手段は、係合の開始から係合の完了までの間、フューエルカットを行う。
(もっと読む)
車両制御システム
【課題】燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】エンジンと、エンジンの出力する動力を車両の駆動輪に伝達する自動変速機とを備え、エンジンの出力トルクと回転数との関係を示す予め定められた所定動作線と、車両の加速度に関する目標値とに基づいてエンジンの目標トルクおよび自動変速機の目標変速比を決定し(54)、かつエンジンに目標トルクを実現させる指令であるトルク指令、あるいは自動変速機に目標変速比を実現させる指令である変速指令の少なくともいずれか一方に遅れ補償を施して出力する(54−56−58A,54−57−58B)ことが可能である。遅れ補償は、出力トルクおよび回転数を示す動作点が目標トルクおよび目標変速比に対応する目標動作点まで変化する過程において、遅れ補償が施されない場合よりも、動作点が所定動作線から離れることを抑制するものである。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、車両の走行状態に拘らず燃料カット制御を適正に実行することで燃費の向上を可能とする。
【解決手段】エンジン11と自動変速機32を搭載し、ECU41として、エンジン11の回転数が予め設定された所定の燃料カット復帰回転数以上で且つアクセル開度が0のときに燃料供給を停止する燃料カット制御部51と、アクセルペダルが継続して踏込まれているアイドルオフ時間が予め設定された閾値より短いかどうかを判定するアイドルオフ時間判定部52と、エンジン11により駆動するエアコン38の作動を検出する補機作動検出部53と、車両の運転状態に応じて自動変速機32の変速段を設定すると共にアイドルオフ時間が閾値より短く且つエアコン38が作動するときに変速点を高回転側に変更する変速制御部54とを設ける。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
車両の制御装置
【課題】操舵輪から伝達される操舵反力を迅速且つ正確に推定する。
【解決手段】
前輪及び後輪のうち少なくとも一方の舵角を変化させることが可能な舵角可変手段(200)と、前輪及び後輪のうち少なくとも一方における左右輪の制駆動力差を変化させることが可能な制駆動力可変手段(600)とを備えた車両(10)を制御する装置(100)は、車両の目標運動状態に対応する複数の目標状態量を設定する設定手段と、車両の運動状態が目標運動状態となるように、設定される複数の目標状態量に応じて舵角可変手段及び制駆動力可変手段を制御する運動制御手段と、設定される複数の目標状態量の各々、設定された複数の目標状態量に応じた上記少なくとも一方の舵角及び設定された複数の目標状態量に応じた上記少なくとも一方における左右輪の制駆動力差のうち複数の要素に基づいて、操舵反力を推定する推定手段とを具備する。
(もっと読む)
パワートレイン制御装置
【課題】油圧制御部に異常が発生し、変速比が大きくなって機関回転速度が上昇してしまったときに、変速比を小さくして内燃機関の過回転を抑制することのできるパワートレイン制御装置を提供する。
【解決手段】電子制御装置300は、第1制御バルブ217と、第2制御バルブ218と、フェールセーフバルブ219とを備える油圧制御部200を操作して無段変速機100における変速比を制御するとともに、内燃機関400のトルクを制御する。電子制御装置300は、第1制御バルブ217を通じて第1プーリ130に適切な量の作動油を供給することができなくなったときに、内燃機関400のトルクを低下させつつ、第2プーリ150における油圧を低下させるとともに、フェールセーフバルブ219を操作して第2制御バルブ218を通じて制御された作動油を第1プーリ130にも供給するように作動油の供給経路を切り替える過回転抑制制御を実行する。
(もっと読む)
車両用駆動装置の制御装置
【課題】コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる車両用駆動装置を提供する。
【解決手段】マニュアルパワーオフダウンシフトに際して、エンジン回転速度NEを一時的に上昇させるブリッピング制御手段70と、ブリッピング制御開始後に減少する入出力回転速度差△Nに基づいて、ロックアップクラッチ26を係合または半係合させるロックアップ制御手段72とを含むことから、タービン回転速度NTとエンジン回転速度NEとの差がロックアップ制御またはロックアップスリップ制御を安定に実行することができる値すなわち所定値Aよりも小さくされて上記各制御が安定に実行され、エンジンが非駆動状態となって十分なエンジンブレーキが得られるので、コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる。
(もっと読む)
車両の制御装置
【課題】時系列で設定した目標加速度に対する追従制御を行う際に、ロックアップクラッチ13の作動時とロックアップクラッチ13の作動不可時との間の挙動差を抑制乃至無くす。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、実加速度が目標加速度に追従するようにエンジン出力を制御するエンジン出力制御部21と、変速制御部22と、ロックアップクラッチ13を作動不可状態を検出する作動不可検出部27とを備える。ロックアップクラッチ13の作動が不可能なときのアクセル踏み込み操作時には、目標加速度設定部23は、予め設定されている、ロックアップクラッチの作動状態での時系列の規範加速度を目標加速度にする。
(もっと読む)
車両の駆動制御装置
【課題】例えばハイブリッド車両の駆動制御装置において蓄電装置の充放電の制限されている際に、より適切に変速を行うことを可能とする。
【解決手段】車両の駆動制御装置10は、第1回転電機M1と、相互に差動回転可能な3つの分配要素を持ち一方に内燃機関8が他方に第1回転電機が連結された動力分配機構16と、分配要素に連結された第2回転電機M2と、分配要素に連結された伝達部材18と、第1回転電機若しくは第2回転電機への電力の供給又は充電を行う蓄電装置56と、駆動輪に動力を出力する出力部材22と、伝達部材から出力部材までの動力伝達経路に設けられると共に相互に差動回転可能な複数の要素を有する変速機構20と、電力の供給又充電が制限されるか否か判定する判定手段98と、電力の供給又は充電が制限されると判定される場合、パワー変速状態から非パワー変速状態に切り替えるように内燃機関の駆動状態を制御する制御手段とを備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
動力伝達制御装置
【課題】エンジン始動時間のばらつきを抑えること。
【解決手段】エンジン10及びモータ/ジェネレータ20の内の少なくとも一方の動力を駆動輪WL,WR側へと伝達可能な動力伝達経路上に、エンジン10とモータ/ジェネレータ20との間の動力伝達を断接可能な係合部を有するクラッチ30を備え、且つ、モータ/ジェネレータ20の回転軸22の回転中にその動力でエンジン10を始動させる際、クラッチ30を当該始動時の目標係合制御量に応じて係合すると共に、その係合に伴う動力伝達経路上でのトルク変動が抑制されるようモータ/ジェネレータ20の動力を制御する車両の動力伝達制御装置において、前記始動時のクラッチ30の係合に伴うエンジン10の目標クランキング期間経過時の回転数に応じて前記始動時の目標係合制御量又は当該目標係合制御量の補正値を求めること。
(もっと読む)
車両制御システム
【課題】自動的に動力源の運転を停止および再開させる場合の燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】車両の動力源が車両の駆動輪によって回転駆動されるときの駆動輪に作用する動力源による負荷の大きさを変更可能な負荷変更手段と、負荷変更手段を制御する制御装置とを備え、制御装置は、車両の走行時に動力源による動力の発生を停止させる動力源停止制御を実行可能であり、制御装置は、動力源停止制御が実行され、かつ動力源が駆動輪によって回転駆動されている間に、運転者による制動操作の終了が検出され、制動操作の終了の検出後に運転者による加速操作の開始が検出された(S1−Y)ときに、制動操作の終了から加速操作の開始までの経過時間が予め定められた所定時間以上である(S2−Y)と、動力源による動力の発生を再開させることなく、負荷変更手段によって負荷の大きさを減少させる(S3)。
(もっと読む)
車両制御装置
【課題】アクセルオンからアクセルオフに移行したときの消費エネルギーを小さくし、エネルギー効率を高くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立した場合に車輪にキャンバを付与するキャンバ付与処理手段と、ニュートラル走行設定条件が成立したかどうかを判断するニュートラル走行設定条件成立判断処理手段と、ニュートラル走行設定条件が成立した場合に、駆動源と駆動輪との間のトルクの伝達を遮断するニュートラル走行設定処理手段とを有する。駆動源における摩擦、イナーシャ等が抵抗になって消費エネルギーが大きくなることがない。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 駆動力配分装置および横滑り防止装置を備えた車両において、両者の協調制御を的確に行って車両の安定性能の向上および制御応答性の向上を図る。
【解決手段】 駆動ヨーモーメントm8が最大駆動ヨーモーメントm10以下の場合には、協調制御部M11が駆動力配分装置Drに駆動ヨーモーメントm8を発生させるので、車両減速度を発生する横滑り防止装置VSAの作動を最小限に抑えて運転者の違和感を小さくすることができ、しかも駆動ヨーモーメントm8は立ち上がりが早いために、利き出しが滑らかであるだけでなく制御応答性が高められる。駆動ヨーモーメントm8が最大駆動ヨーモーメントm10を超えた場合には、協調制御部M11が駆動力配分装置Drに最大駆動ヨーモーメントm10を発生させるとともに、駆動ヨーモーメントm8に対する不足分を横滑り防止装置VSAに発生させるので、駆動力配分装置Drでは賄いきれない駆動モーメントm8を横滑り防止装置VSAで補って車両を安定化することができる。
(もっと読む)
車両の制御装置
【課題】故障時の車両加速を確実に防止し、且つ、故障検出信頼性向上、開発コスト削減の要求も満たす。
【解決手段】車両暴走に至る可能性のある故障が検出されたときに、エンジン11から車軸へのトルク伝達をカットして、故障時の車両加速を防止しながら車両を惰性走行させる。トルク伝達がカットされている期間にフェイルセーフ処理に移行すべき故障が発生しているか否かを判定し、当該故障が発生していると判定されれば、フェイルセーフ処理に移行してエンジン11の出力トルクを抑制した後にトルク伝達手段をトルク伝達可能な状態に戻してエンジン11の出力トルクを抑制して退避走行を可能とする。
(もっと読む)
81 - 100 / 955
[ Back to top ]