
Fターム[3D041AD02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | 機関軸回転数、出力 (992)
Fターム[3D041AD02]の下位に属するFターム
加減速度、変化割合 (37)
Fターム[3D041AD02]に分類される特許
61 - 80 / 955
車両用動力伝達装置の制御装置
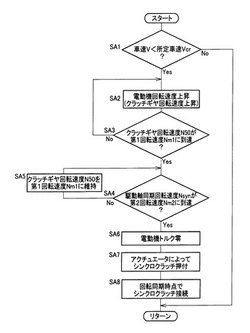
【課題】噛合クラッチ接続時に発生するショックを抑制することができると共に、噛合クラッチにかかる負荷を低減することができる車両用動力伝達装置の制御装置を提供する。
【解決手段】車両走行中のシンクロクラッチ42の接続が、電動機30のトルクTmが略零の状態で実施されるため、クラッチ接続時において前輪車軸26への電動機30のトルク伝達が発生しないに従い、接続時に発生するショックを抑制することができる。また、シンクロクラッチ接続時において電動機30のトルクTmが零であるため、シンクロクラッチ42の前後の回転速度が同期されると、シンクロクラッチ42がスムーズに接続されるに従い、シンクロクラッチ42にかかる負荷が低減され、シンクロクラッチ42の耐久性低下が抑制される。
(もっと読む)
惰行制御装置

【課題】乗り心地を向上させ、ドライバーの不快感を低減することが可能な惰行制御装置を提供する。
【解決手段】惰行制御中は惰行許可フラグをオフにし、惰行制御中でなく、かつ惰行制御終了条件が成立したときに惰行許可フラグをオンにする惰行許可フラグ制御部6を備え、惰行制御実行判定部5は、惰行許可フラグがオンであるときのみ惰行制御を開始するようにされる。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
惰行制御装置
【課題】惰行制御中のアクセル開度の変化幅が大きい運転者に対してもアクセル開度の変化幅が小さい運転者と同等に惰行制御が実施できる惰行制御装置を提供する。
【解決手段】アクセル開度の変化幅を学習し、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が大きいときには惰行制御可能領域CAを拡大させ、惰行制御可能領域CAの領域幅よりアクセル開度の変化幅が小さいときには惰行制御可能領域CAを縮小させる惰行制御可能領域調節部4を備える。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
惰行制御装置
【課題】ドライバーのアクセル操作に応じた惰行制御を行うことができ、ドライバーの不快感を低減可能な惰行制御装置を提供する。
【解決手段】所定の学習開始条件を満たし、かつ、アクセル開度速度が、惰行制御開始条件、あるいは惰行制御終了条件で設定されているしきい値範囲外となったとき、当該アクセル開度速度の大きさに応じて、前記しきい値範囲を拡大するアクセル開度速度学習手段6を備えた。
(もっと読む)
ブレーキ制御装置
【課題】クルーズシステムにより走行停止させることに伴いアイドルストップシステムによりエンジンを自動停止させた場合に、車両が動き出してしまうことの防止を図ったブレーキ制御装置を提供する。
【解決手段】先行車両の走行停止に伴い自車両を走行停止させるよう制動ブレーキを自動作動させるクルーズシステムと、エンジン20を自動停止させるアイドルストップシステムと、パーキングブレーキ(パーキング用ブレーキシュー53)を電動モータ50で自動作動させる電動パーキングブレーキシステムと、を備えた車両に適用され、前記クルーズシステムにより走行停止させることに伴い前記アイドルストップシステムによりエンジン20を自動停止させた場合には、前記電動パーキングブレーキシステムによりパーキングブレーキを自動作動させる。
(もっと読む)
ハイブリッド車両
【課題】 蓄電装置の残容量が上限又は下限に近いことによって電動機による回転数合わせができないときでも、蓄電装置の損傷を発生させないように変速又はプレシフトをして、走行に影響を与えないハイブリッド車両を提供する。
【解決手段】 制御手段21a1は、蓄電池1の蓄電量が所定の上限値以上又は所定の下限値以下の場合に、モータMGを停止して、第1クラッチC1又は第1噛合機構SM1の摩擦力によって第1入力軸34の回転数を第1入力軸34の駆動ギアの回転数に近づける、或いは、第1入力軸34の回転抵抗力によって第1入力軸34の回転数を低下させることにより、第1入力軸34の回転数と第1入力軸34の駆動ギアの回転数との差を所定値以下にしてから、第1噛合機構SM1によって第1入力軸34の駆動ギアを第1入力軸34に連結するように制御する。
(もっと読む)
車両駆動システムの制御装置
【課題】内燃機関の出力を一定にしながら回転数を変更することが可能な車両駆動システムにおいて、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率が最大となる回転数まで内燃機関の回転数を速やかに変化させる。
【解決手段】回転数の許容最大変化量を出力に関連付けて記憶装置に記憶しておく。要求出力に応じた許容最大変化量を記憶装置から読み出し、予め設定された動作線上の回転数を初期値として許容最大変化量で回転数を変化させていく。そして、回転数が変更される度に、内燃機関の熱効率と動力伝達機構の伝達効率との乗算値で表されるシステム効率を計算し、システム効率が最大となる回転数を特定する。そして、システム効率が最大となる回転数を最適回転数として確定する。
(もっと読む)
車両の制振制御装置
【課題】走行状況に応じた制振トルクを算出することが可能な車両の制振制御装置を提供する。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクを算出する第1補正トルク算出手段と、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクを算出する第2補正トルク算出手段と、走行状態に基づいて前記第1補正トルクと前記第2補正トルクに所定の重み付けをした補正トルク指令値を算出し、前記制駆動トルク発生手段に出力する入力信号処理手段と、を備え、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクと、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクとに、走行状態に基づいて所定の重み付けを行う。
(もっと読む)
車速制御装置
【課題】未知の負荷変動に対する応答性に優れた車速制御装置を提供すること。
【解決手段】目標駆動力(目標エンジン出力PeT )が、典型的なエンジン回転速度フィードバック制御にカスケードされた車速フィードバックから演算される。目標車速VT および実車速VR の偏差に基づく第1のフィードバック量FD1と、要求車速VS 及び実車速VR の偏差に基づく第2のフィードバック量FD2との加算値に基づいて、より大きな目標駆動力が演算される。第2のフィードバック量FD2は、要求される応答を実現するフィルタ(一次応答モデル、レートリミッタ等)によって要求車速を演算し、次いで、その要求車速と実車速を比較することで得られる。未知の負荷変動に対してエンジン出力の非常に迅速な補償を自動的に行い、車速を精度良く制御する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
車両の制御装置
【課題】車速を目標車速に制御するクルーズコントロールが実行可能な車両において、クルーズコントロール実行中のエネルギ消費を抑制して効率を高める。
【解決手段】クルーズコントロール時にはドライバが継続的な定速走行を希望しており、回生による制動力を発生させる必要がない点に着目し、クルーズコントロール時に定速走行管理範囲(具体的には、許容下限値M≦[加速度α]≦許容上限値N、及び、許容下限値m≦[車速V]≦許容上限値の範囲)内で惰行走行状態を作り出すことにより、エネルギの消費を低減するとともに、エネルギの電気パス通過分を抑制してエネルギ損失を低減する。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
車両制御装置
【課題】トルクコンバータ20付きの自動変速機2のシフトダウンが手動操作により要求されたときに、エンジン回転数を一時的に上昇させるブリッピングを行いながら、現在変速段から要求変速段への切り換えを行う高応答のブリッピングシフトダウン制御を実行する車両制御装置において、前記高応答のブリッピングシフトダウン制御を実行する際に、触媒15の温度が高い場合、低い場合と遜色のない変速応答性を確保しながら、触媒15の過剰昇温を抑制または防止する。
【解決手段】ブリッピングシフトダウン制御を実行する際、エンジン1の排気系に設けられる触媒15の温度が高いほど、スロットルバルブ6の開度指示を小さく設定するとともに、自動変速機2に備える多数の係合要素C1〜C4,B1,B2のうち要求変速段を成立するための係合側係合要素に対する油圧指示を大きく設定する。
(もっと読む)
車両の退避走行制御装置
【課題】車両走行中の緊急時に車両を安全な場所まで退避走行させる際の安全性・ドライバビリティを向上させる。
【解決手段】運転者が操作可能な位置に退避走行スイッチ11を設ける。車両走行中に何等かの緊急事態が発生して運転者が車両を停車させた方が安全だと感じたときに、運転者が退避走行スイッチ11をオン操作すると、退避走行用リレー20と電子スロットル用リレー21がオフされて、車両走行モードが退避走行モードに切り替えられる。これにより、電子スロットル装置18の電源をオフして、スロットル開度を退避走行用スロットル開度まで閉じることで、エンジン17の出力を低下させて、車両駆動力を抑制し、車両を退避走行させる。退避走行中も、エンジン17の運転を継続することで、パワーステアリング装置及びブレーキ装置を運転者がハンドル操作可能で且つ退避走行中のブレーキ力を確保する。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両駆動装置
【課題】ダウンシフト時にダブルクラッチ処理とブリッピング処理とギヤ段変更処理とを協調制御するための制御装置100,200を備える車両駆動装置において、前記ブリッピング処理によって変速機3の入力軸回転数が上昇し過ぎた場合でも、前記ブリッピング処理の後でギヤ入れ処理へ速やかに移行可能にするとともに、ギヤ入れ処理での常時噛み合い式の変速機3に備えるシンクロメッシュ機構34A〜34Cによる回転差吸収量を低減可能にする。
【解決手段】制御装置100,200は、前記ブリッピング処理を行うことによって入力軸回転数Niが目標範囲の上限値を上回った場合に、エンジン1をトルクダウンさせることによりエンジン回転数Neを速やかに低下させてから、摩擦クラッチ2を微継合させることにより入力軸回転数Niを低下させながらエンジン回転数Neを上昇させて、それら両方を前記目標範囲に収める補正処理を実行する。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】特に新たな機構等を設けることなく、不要な減速感による走行フィーリングの悪化を招くことがなく、路外逸脱防止のためのヨーモーメントを適切に発生する。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、交差角αと第1の逸脱量yLと第2の逸脱量ySに応じて障害物や白線に対する車両の逸脱を防止するのに必要な必要モーメントMを算出し、この必要モーメントMに応じてトルクアップ基準値Tsを設定し、車速V0に応じて設定するトルクアップ補正ゲインGtで補正してトルクアップ量ΔTを求め、エンジン制御装置11に出力する。
(もっと読む)
61 - 80 / 955
[ Back to top ]