
Fターム[3D041AD02]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | 機関軸回転数、出力 (992)
Fターム[3D041AD02]の下位に属するFターム
加減速度、変化割合 (37)
Fターム[3D041AD02]に分類される特許
101 - 120 / 955
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
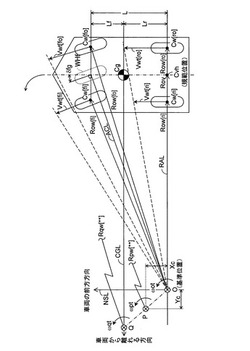
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
車両の速度制御装置

【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
自動変速機のリバースインヒビット制御方法
【課題】車両に搭載され前進側クラッチ及び後進側クラッチを備える自動変速機において、後進側クラッチの過大な高温化を抑制し、後進側クラッチの耐久性向上を図る。
【解決手段】シフトセレクタが後進レンジにあるとともに車速vが所定車速vthを上回る場合に前進側クラッチたる逆転ブレーキ48後進側クラッチたる直結クラッチ49を切断してニュートラル状態とするリバースインヒビット制御を行うステップと、前記ニュートラル状態としている際に直結クラッチ49に供給する潤滑油の油圧又は量を増加させる制御を行うステップと、車速vが所定車速vthを下回った場合に直結クラッチ49の締結を開始する制御を行うステップと、直結クラッチ49の締結開始の際にエンジン回転数Neを低減させるための出力ダウン制御を行うステップとを実行する。
(もっと読む)
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
動力伝達装置
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
車両の制御装置
【課題】燃料カットからの復帰時において、混合気の燃焼状態が不安定なときに生じるおそれのあるエンジンストールの発生を抑制することのできる車両の制御装置を提供する。
【解決手段】内燃機関10の出力軸10aは、ロックアップクラッチ機構14を備えるトルクコンバータ11を介してCVT12に接続されている。ECU18は、燃料カットの実行中の機関回転速度が復帰回転速度近傍の速度であってこの復帰回転速度よりも高い一定の速度に維持されるようにCVT12の変速比を制御する。そしてECU18は、燃料カット実行中の機関回転速度及び復帰回転速度を機関水温が低いときほど高い回転速度となるように変更する。
(もっと読む)
ハイブリッド電気自動車の発進制御装置
【課題】走行用動力源の電動機を用いたエンジン自動始動後に発進変速段への切換操作に起因する遅れを生じることなく迅速に車両を発進できるハイブリッド電気自動車の発進制御装置を提供する。
【解決手段】停車状態からの車両発進時においてエンジン1が自動停止されているとき、第1歯車機構G1をニュートラル状態にすると共にアウタクラッチ21を接続して電動機2によりエンジン1を始動する一方、第2歯車機構G2を第3速に切り換えてインナクラッチ22を接続し、この第3速を介してエンジン1の駆動力で車両を発進させることにより、第1歯車機構G1をニュートラル状態から発進変速段である第2速に切り換えることによる遅れを防止する。
(もっと読む)
船外機の制御装置
【課題】変速機を備え、加速時に変速するときの内燃機関の動作を適切に制御して機関回転の吹き上がりを防止すると共に、加速直後における加速性能を向上させるようにした船外機の制御装置を提供する。
【解決手段】変速機を備える船外機の制御装置において、内燃機関の機関回転数NEが目標機関回転数NEaとなるようにスロットルバルブを開閉するアクチュエータ(スロットル用電動モータ)の駆動を制御し、変速機で2速が選択されているとき、内燃機関に対して加速が指示されたか否か判定し(S30)、加速が指示されたと判定されるとき、2速から1速に変速するように変速機の動作を制御し(S46)、2速から1速に変速された後、内燃機関の出力トルクが最大となるように目標機関回転数NEaを変更する(S48)。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
作業車両の走行駆動装置
【課題】走行安定性及び不整地での走行性能を良好に確保しつつ、動力伝達効率を高め、燃費の改善を実施上有効に図り得る作業車両の走行駆動装置を提供する。
【解決手段】走行駆動装置は、エンジン1により駆動される油圧ポンプ11とこの油圧ポンプの吐出圧油により駆動される油圧モータ12とを有してなる油圧式動力伝達部10と、エンジンにより駆動される発電機21、バッテリ22やキャパシタなどの蓄電装置又はその両方からなる電力供給源と、この電力供給源から供給される電力により駆動される電動機25と、この電動機の出力と上記油圧式動力伝達部の油圧モータの出力とを合わせて車軸33に伝達する合力伝達部30とを備える。
(もっと読む)
動力伝達装置
【課題】非走行用ポジションから走行用ポジションへシフト操作された際に走行の開始をスムーズに行なえるようにする。
【解決手段】シフトレバーがN(ニュートラル)ポジションのときにクラッチC1内の作動油をマニュアルバルブ40を介してドレンする油圧回路30が組み込まれた動力伝達装置を備える車両において、エンジンが自動停止されている状態でシフトレバーがNポジションから解除されたときには、その直後に電磁ポンプ70の駆動を開始し、シフトレバーがDポジションを確定したときには、エンジンを自動始動すると共にエンジンが完爆したときに電磁ポンプ70の駆動を停止する。これにより、エンジンの自動始動に伴って機械式オイルポンプ32が駆動を開始したときにクラッチC1を迅速に係合して車両を発進させることができる。
(もっと読む)
車両用接触回避支援装置及び車両用操舵アシスト装置
【課題】障害物との接触回避をより好適に支援することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14は、車両10と車両10前方の障害物12との相対位置を検出する相対位置検出手段80と、前記相対位置に基づいて接触回避の支援の要否を判定し、接触回避の支援が必要であると判定したとき、回避方向への操舵アシストを制御する操舵アシスト制御手段20と、車両10にかかるヨーモーメントMyに影響を及ぼし且つ当該影響が操舵方向により異なる走行環境を検出する走行環境検出手段20、83とを備え、前記操舵アシスト制御手段20は、前記走行環境に基づいて前記回避方向への操舵のアシスト力Fasiを補正する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両の車線幅方向横位置が予め設定した自車両に対する接近防止の指標となる車線幅方向横位置である制御開始位置となった場合、制御開始と判定して自車走行車線の中央側へ向かうヨーモーメントを自車両に付与して自車両を制御する。そして、自車両の車線幅方向横位置が前記制御開始位置の外側から内側に移動した場合、予め設定した制御状態保持時間が経過するまでの間、前記制御開始の判定を前記制御開始位置の内側に移動する前と比較して抑制する。
(もっと読む)
車両の制御装置
【課題】吸入空気量を増大させてF/Cを行っていた状態から復帰する場合におけるショックを防止することできる制御装置を提供する。
【解決手段】燃料が供給されずに回転している状態における吸入空気量の増大に応じて動力損失が低減するエンジンの出力側に変速比が連続的に変化する変速機が連結され、減速時のエンジン回転数が予め定めた復帰回転数以上の場合に前記エンジンに対する燃料の供給を停止し、かつ燃料の供給を停止している減速時の車速の低下に伴って前記変速比を増大させ、その変速比の増大に応じて前記吸入空気量を増大させる車両の制御装置において、前記エンジンに対する燃料の供給を再開する場合に、前記増大させた吸入空気量を減少させる制御(ステップS14)を行うように構成されている。
(もっと読む)
内燃機関システムの制御方法および内燃機関システム
【課題】吸気弁の閉弁時期を早閉じ範囲と遅閉じ範囲とに設定し、該閉弁時期の遅閉じ範囲から早閉じ範囲への移行中にスロットル弁を絞る場合に、開き気味のスロットル弁開度に設定することができるようにして、ポンプ損失を出来る限り低減する。
【解決手段】機関運転状態が第1運転領域から第2運転領域へ移行するときに、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動する運転領域移行動作が生じるようにするとともに、動力伝達装置による機関速度低下動作(シフトアップ)の要求が有ると判定したとき(ステップS73の判定がYESであるとき)において、前記運転領域移行動作終了の判定がなされている場合(ステップS74の判定がNOである場合)に、機関速度が低下するように動力伝達装置を制御する(ステップS75)。
(もっと読む)
車両の駆動力制御装置
【課題】車両の駆動力を運転者の意図および車両の走行状況に一層適合させることの可能な、車両の駆動力制御装置を提供する。
【解決手段】車両における要求駆動力を求めるとともに、なまし係数を用いて要求駆動力をなまし処理することによりなまし駆動力を求め、そのなまし駆動力を目標駆動力として車両の駆動力を制御する、車両の駆動力制御装置において、車両の前後加速度または横加速度の少なくとも一方の値に基づいて、車両の加速度変化の滑らかさに対する車両の運転者の加速意図の度合いを求める加速意図算出手段(ステップS4)と、加速意図の度合いに基づいてなまし係数の大きさを変更するなまし係数算出手段(ステップS5)、要求駆動力をなまし係数を用いてなまし処理することにより、なまし駆動力を求めるなまし処理手段(ステップS7,S8)とを備えている。
(もっと読む)
ハイブリッド車両
【課題】1モータ2クラッチ式のハイブリッド車両の発進制御において、HCM10が正常時であれば、内燃機関1は、HCM10からの目標トルクに基づいて自身の制御を行い、モータジェネレータ3が内燃機関1の出力を吸収することで第2クラッチ2をわずかにスリップさせ、耐久性を考慮した発進を実現している。本願では、CAN通信が失陥し、かつ、モータジェネレータ3が異常である場合の車両発進時の制御においても、第2クラッチの耐久性を確保しつつ、退避走行を可能にすることを目的とする。
【解決手段】CAN通信不良によりECM11がHCM10から孤立し、かつ、モータジェネレータ3が異常時において、ECM11は、第2クラッチ5がわずかにスリップしながら車両が発進できるように第2クラッチ5の締結トルク(車速)に応じて内燃機関1を制御する。これにより、耐久性を考慮した発進を実現できる。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
101 - 120 / 955
[ Back to top ]