
Fターム[3D041AD51]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 車両状況 (2,223) | 車速、加減速度 (1,832)
Fターム[3D041AD51]に分類される特許
1 - 20 / 1,832
車両の駆動力制御装置
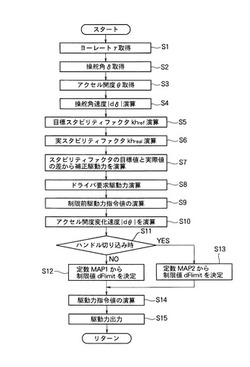
【課題】旋回性能と加減速性能とを両立させることができるように駆動力を制御する装置を提供する。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
(もっと読む)
クルーズコントロールシステム

【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両用運転操作支援装置
【課題】実車位置とナビゲーション装置上の自車位置とにずれが生じていた場合でもカーブを脱出する際の加速操作に対する違和感を運転者に与えることなく運転操作支援を行う。
【解決手段】ナビゲーション装置3からカーブ情報を取得し、カーブ情報からカーブを抜け出るための脱出可能領域を設定し、車速V・ヨーレイトY・横加速度Gから走行状態を取得し、カーブの長さと車速とから通過時間を求め、走行状態から平均瞬間曲率を求め、平均瞬間曲率を積分して自車が脱出可能領域にある場合には速度抑制制御を解除する。ナビゲーション装置のみでカーブ走行時の運転操作支援を行う場合のずれを防止することができ、運転操作支援としてカーブ走行自に減速制御する場合に、運転者がカーブ脱出のために加速操作しようとした場合に減速制御を続けてしまうという違和感を運転者に与えることを防止し得る。
(もっと読む)
変速制御装置
【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
車両の駆動制御装置
【課題】駆動側が遠心式のベルト式無段変速機と電子スロットル部とを備える構成で、電子スロットル部のモードに合わせた適切なドリブン推力を設定し、燃料の節約を図ることができる車両の駆動制御装置を提供する。
【解決手段】電子スロットル制御部31は、選択された運転モードに応じて吸気絞り弁21の開度を制御し、従動側接圧力可変部36は、所定車速を越えると、又は、スロットルグリップ26の開度が一定の状態が継続すると、従動プーリー51とベルト45との接圧力を低減させるようにした。
(もっと読む)
前後駆動力配分比制御装置
【課題】加速応答性の向上と旋回性能の向上とを両立させることのできる四輪駆動車の前後駆動力配分比制御装置を提供することを目的とする。
【解決手段】車両における前輪と後輪との駆動力を変化させることのできる前後駆動力配分比制御装置において、前後加速度が生じる場合の目標スタビリティファクタを求める目標値算出手段(ブロックB2)と、前記目標値算出手段によって求められた目標スタビリティファクタと車両に実際に生じている前後加速度に応じて変化する加速度検出値とに基づいて前輪と後輪との少なくともいずれか一方に対する駆動力の配分比を求める前後配分比算出手段(ブロックB3〜B7)とを備えている。
(もっと読む)
車両の統合制御装置
【課題】衝突防止制御装置が自動ブレーキを発生して障害物との衝突を回避するにあたり、ABSの作動や車両の走行状態を考慮しつつ4輪の前後力を最大限活用して短い制動距離で停止することを可能として安全性、信頼性を向上させる。
【解決手段】衝突防止制御装置30が障害物との衝突を防止する制動力を発生させる際に、統合制御ユニット50は、自車両が直進状態の場合は、ディレイ時間Tdeが経過するまでは前後軸間の締結トルクCawdとして通常時に設定される締結トルクの値またはデフロック状態となる締結トルクの値である第1のトランスファクラッチトルクを設定させ、その後は、締結トルクCawdを略0に近い第2のトランスファクラッチトルクに低下させる。また、自車両が旋回状態の場合は、第2のトランスファクラッチトルクを設定させる。
(もっと読む)
クリープ車速制御装置
【課題】運転者による運転操作を複雑化することなく、クリープ速度を所望の速度に容易に調整することが可能なクリープ車速制御装置を提供すること。
【解決手段】ブレーキペダルの踏込量に応じてクリープ車速の目標車速を定める。そして、車両のクリープ車速が目標車速となるように、原動機16によって発生される駆動トルク及びブレーキ装置26によって発生される制動トルクを制御する。このため、車両の運転者は、ブレーキペダルの踏込操作により、車両のクリープ車速を、容易に所望の速度に調整することができ、さらに、その増減の調整も容易となる。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両用駆動システム
【課題】車両走行中かつエンジン休止中におけるエンジン始動制御にて速やかな加速を実現できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、エンジン2と、変速機4と、エンジン2および変速機4の間に配置されるクラッチ3とを備える。また、車両用駆動システム1は、アクセル開度θを取得するアクセル開度センサ724と、加速要求取得手段の出力信号に基づいてエンジン2、変速機4およびクラッチ3を駆動制御する制御装置7とを備える。そして、制御装置7は、車両走行中かつ内燃機関2の休止中にて、ドライバの加速要求が所定の閾値以上となったことを契機として変速機4の変速段をニュートラルから前進段に変更すると共に、エンジン2を始動してクラッチ3を係合状態とする。
(もっと読む)
制駆動力制御装置
【課題】後輪の左右輪を共通の制動力制御機構で制御した場合に車両の挙動を安定化することを可能とする制駆動力制御装置を提供することにある。
【解決手段】車両の制駆動力を制御する制駆動力制御装置であって、前輪の右輪の制動力を調整する第1制動力調整部と、前輪の左輪の制動力を調整する第2制動力調整部と、後輪の左右輪の制動力を同時に調整する第3制動力調整部と、車両の実旋回状態量を検出する挙動検出部と、車両の目標旋回状態量を算出し、当該目標旋回状態量と実旋回状態量とを比較し、車両の挙動を判定する挙動判定部と、挙動判定部で判定した結果に基づいて、3つの制動力調整部の全てで前輪及び後輪の制動力を調整する第1制御モードと、3つの制動力調整部のうち2つ以下の制動力調整部で前輪及び後輪の少なくとも一方の制動力を調整する第2制御モードと、を切り換える制御部と、を備えることで上記課題を解決する。
(もっと読む)
車両の制御装置
【課題】 車両減速状態における機関出力制御及びロックアップクラッチ締結制御を適切に行い、運転者の違和感を解消するとともに燃費を向上させることができる車両の制御装置を提供する。
【解決手段】 ロックアップクラッチ30を締結するときの目標メインシャフト回転数NTMOBJに応じてLC制御下限トルクTRQLMLを設定し、車両減速中において機関出力がLC制御下限トルクTRQLMLに達した後はLC制御下限トルクTRQLMLに保持する制御を実行し、機関出力がLC制御下限トルクTRQLMLに保持されている期間においてロックアップクラッチ30の締結を実行する(t2)。機関出力をLC制御下限トルクTRQLMLに保持する出力保持制御を実行することにより、機関回転数NEが目標メインシャフト回転数NTMOBJ近傍に維持される。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
車両制御装置
【課題】負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供すること。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
(もっと読む)
車両の制御装置
【課題】第2モータジェネレータの出力トルクTMが零付近である状態においてギヤの歯同士が衝突することによる音の発生を未然に防ぐ。
【解決手段】エンジンと、第2モータジェネレータと、エンジンと第2モータジェネレータとを連結するギヤと、エンジンによって駆動されて発電する第1モータジェネレータと、第1モータジェネレータが発電した電力を蓄える蓄電装置とが搭載された車両の制御装置は、蓄電装置の残存容量が予め定められたしきい値より大きいと、エンジンの出力軸回転数が増大するように制御するECUを備える。
(もっと読む)
走行支援装置
【課題】車両の後退時において、障害物と車両との距離が至近距離となった場合でも、より精緻に車両の走行を制御することが可能な走行支援装置を提供する。
【解決手段】走行支援装置10は、車両11後方の障害物Oaを検知するソナー12を有し、後退時に障害物Oaとの接触を防止するように車両11の走行を制御するPCS ECU20を備える。PCS ECU20は、障害物Oaがソナー12により検知不可能な範囲に接近したときは、ソナー12により障害物Oaを検知可能であった位置からの車両11の走行距離に基づいて推定される障害物Oaとの距離に基づいて車両11の走行を制御する。障害物Oaが接近し過ぎてソナー12により検知不可能な範囲に入ってしまい、障害物Oaをロストしてしまった状況でも、障害物Oaとの距離を推定し、推定された距離に基づいて障害物Oaとの接触を防止することができる。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
1 - 20 / 1,832
[ Back to top ]