
Fターム[3D114FA11]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め対象 (394) | ワーク取扱装置と搬送ライン間 (20)
Fターム[3D114FA11]に分類される特許
1 - 20 / 20
搬送処理装置
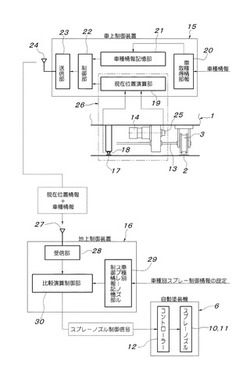
【課題】搬送台車上の定位置に積載されて搬送される複数種類の車体を自動塗装機によって自動塗装する塗装ラインなどに効果的に活用出来る搬送処理装置を提案する。
【解決手段】搬送台車1には、車種情報記憶部21と、搬送台車1の現在位置を判別する現在位置情報取得手段26と、車種情報と現在位置情報とを地上制御装置16に伝送する情報伝送手段が設けられ、地上制御装置16には、自動塗装機6を制御するときの搬送台車の現在位置が車体Bの種別毎に設定記憶される車種別スプレーノズル制御情報記憶部29と、自動塗装機6に制御信号を送信する比較演算制御部30が設けられ、この制御部30が、前記記憶部29の記憶情報と、自動塗装機6の位置を通過しようとする搬送台車1から受け取った種別情報及び現在位置情報とを照合して、前記記憶部29の記憶情報通りに、搬送台車1の現在位置に合わせて自動塗装機6を制御する構成。
(もっと読む)
搬送装置

【課題】外部入力信号機器を減らすことができる搬送装置を提供する。
【解決手段】搬送経路上にてパレット21を搬送または停止する搬送装置10であって、パレット21はチェーン25を備え、チェーン25に歯合するスプロケット31と、スプロケット31を駆動し、モータ33と、モータ33の回転角を検出するエンコーダ34と、を備え、エンコーダ34からの検出値に基づいてモータ33の回転を制御するサーボモータ機構32と、サーボモータ機構32によってパレット21の搬送または停止を制御するコントローラ50と、を具備し、コントローラ50は、パレット21が基準位置を通過したときをサーボモータ機構32のエンコーダ34によって0点基準位置として検出し、0点基準位置からの積算検出値に基づいて、パレット21を搬送または停止する。
(もっと読む)
搬送台車移動システム、搬送ライン及び搬送方法
【課題】ベース部品に対する下方と、ベース部品に対する上方及び側方との上下2段における作業を、別々の作業者によって同時間帯に行うことができる搬送台車移動システムを提供すること。
【解決手段】搬送台車移動システム1は、ベース部品8を載置する搬送台車3を、複数台連続して組付作業工程に移動させるよう構成してある。互いに隣接する搬送台車3間においては、搬送台車3Aの複数のポスト44Dと、搬送台車3Bの複数のポスト44Cとに、上方作業台7が架け渡してある。搬送台車3が移動する床面2には、上方作業台7に対する、搬送台車3の移動方向Dの左右両側に、固定作業台15が設置してある。搬送台車移動システム1は、搬送台車3が複数台連続して移動する際に、下方作業台5と、上方作業台7及び固定作業台15との上下2段の作業台において、ベース部品8に対して作業者Mが作業できるよう構成してある。
(もっと読む)
表面処理領域に対して被処理物を搬入及び搬出する装置並びに方法
【課題】生産性の向上、表面処理領域に対する被処理物の搬入及び搬出動作のフレキシブル化並びにコストの低減化を図ることができる表面処理領域に対して被処理物を搬入及び搬出する装置を提供する。
【解決手段】ガイドレールに沿って移動可能な、被処理物Wを支持する複数のキャリア1、キャリア1の被牽引部材に係合する第1係合ドッグが取り付けられた通常速牽引駆動手段11、前記被牽引部材に係合する第2係合ドッグが取り付けられた、通常速牽引駆動手段11よりも牽引速度が速い高速牽引駆動手段12、表面処理領域Cの左右片側に設置した、前記ガイドレールの一部を分割した分割レールを搬送方向右側から見て反時計回りに回転させる回転駆動手段10、前記被牽引部材及び前記第1係合ドッグの係合を解除する第1係合解除手段、前記被牽引部材及び前記第2係合ドッグの係合を解除する第2係合解除手段を備えた。
(もっと読む)
車種検知方法、車種検知装置、ピッキング方法、およびピッキングシステム
【課題】同一の生産ラインで複数種類の自動車を連続的に生産する混流生産ラインにおいて、組み付ける車体部品の車種を正確に検知することができる車種検知方法および車種検知装置を提供する。
【解決手段】車体部品Wの位置および姿勢の少なくとも一方をガイド部材14により矯正しつつ、当該ガイド部材14に設けられたセンサ15により車体部品Wが有する車種毎に固有の特徴点の有無を検出することによって、車体部品Wの車種を検知する。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
車体に対する足回り部品の同期搬送装置及び同期搬送方法
【課題】車体に対する足回り部品の同期搬送装置及び同期搬送方法において、当該装置の設置コスト及び運転コストを抑え、かつ車種変更への対応による煩雑さ及びコスト高を抑える。
【解決手段】フリクションコンベア31の主ライン部28aの始点28bの上流側で搬送装置1を停止させた後、該搬送装置1をフロア側チェーンコンベア24の係合部に係合させるタイミングで主ライン部28aに送り出すと共に、搬送装置1が主ライン部28aの終点28cまで走行した後、該搬送装置1を前記係合部への係合を解除するタイミングでフリクションコンベア31のリターン部28dに導く。
(もっと読む)
車両組立ラインにおけるドア搬送装置およびドア搬送方法
【課題】コンベヤの総設置距離を小さくしつつ、左右のドアの艤装組立作業を作業者が対面するかたちで行う際に、一方の作業者側でのハンガーの揺れ等が他方の作業者側での作業に影響しないドア搬送装置を提供する。
【解決手段】一次コンベヤ3と一対の二次コンベヤ4と備え、一次コンベヤ3の一次ハンガー5に各二次コンベヤ4の二次ハンガー16がそれぞれに吊り下げ支持可能となっている。特定の区間ではドアDを搭載した二次ハンガー16を二次コンベヤ4のガイドレール17から外して一次コンベヤ3によって搬送する。別の区間では各二次ハンガー16を一次ハンガー5から切り離し、それぞれの二次コンベヤ4で独立して搬送する。
(もっと読む)
ガラス取り付けシステム
【課題】ガラスの取り付け作業にかかる時間を短縮でき、かつ、設備を小型化してコストを低減できるガラス取り付けシステムを提供すること。
【解決手段】ガラス取り付けシステム1は、フロントガラス11またはリヤガラス12とクォータガラス13とを搬送路21に沿って搬送する搬送装置22と、搬送路21に設けられた一対のガラス取り付けロボット27、28と、を備える。一対の取り付けロボット27、28は、フロントガラス11またはリヤガラス12を取り付ける大型ガラス取り付けロボット28と、クォータガラス13を取り付ける小型ガラス取り付けロボット27と、で構成される。搬送装置22は、フロントガラス11またはリヤガラス12とクォータガラス13とを1組として、この1組のガラスが同時に大型ガラス取り付けロボット28および小型ガラス取り付けロボット27に供給されるように、間欠的に駆動する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
回転力伝達装置
【課題】昇降機能付き搬送車における回転運動を上下方向の直線運動に変える変換機構の入力軸との連結動作の信頼性が高い回転力伝達装置を提供する。
【解決手段】昇降機能付き搬送車1の基体3の側端部に、入力軸20に連結された被駆動回転盤12を設け、搬送経路の所定位置において、被駆動回転盤12の回転中心軸B方向が略軸芯方向となるように配置され、軸芯方向に進退可能に支持された軸体10、軸体10の先端に被駆動回転盤12に対向するように取り付けられた駆動回転盤11、軸体10を軸芯方向に進退させる進退アクチュエータ7、軸体10を回転中心軸Aまわりに回転させる回転アクチュエータを備え、被駆動回転盤12に回転中心軸Bから径方向に離間した係合孔を形成し、駆動回転盤11に前記係合孔に遊嵌する係合ピン21を設けた。
(もっと読む)
昇降機能付き搬送台車及びそれを用いた自動車組立ライン
【課題】左右のガイドポストを用いて受部材により車体を支持して搬送する昇降機能付き搬送台車において、ドアを取り付けた状態で部品組み付け作業を行っても作業性が高く、ガイドポスト等の重量及びコストの増大を抑制する。
【解決手段】車体AのドアB,Cを全開した状態で、ドアB,Cと干渉しないように、車体Aの前後方向略中央左右両側面から離間させて基台2上に立設した左右一対のガイドポスト3,4、ガイドポスト3,4から左右方向内向きに突出して車体Aの左右両側底部を支持する、ガイドポスト3,4に沿って昇降可能な左右一対の受部材5,6、受部材5,6同士を連結する連結部材7を備え、連結部材7が受部材5,6の下側にあり、受部材5,6と連結部材7とからなる部材の形状が、前後方向から見て略U字状であり、連結部材底部の左右方向に延びる凸条が係合する凹条又は長孔を基台2に形成した。
(もっと読む)
搬送装置
【課題】自動車の組立てラインなどに活用できる搬送装置を提供する。
【解決手段】一定走行経路を走行する搬送用走行体11にその走行方向と平行に前後移動自在な可動体33を設け、この可動体33に、当該可動体33の移動方向と平行な垂直面に沿って上下方向に揺動自在にリンク35aの一端を軸支し、このリンク35aの他端にハンガー13を前後方向に揺動自在に軸支し、リンク35aの中間位置と搬送用走行体11とに両端を揺動自在に軸支したリンク39により、リンク35aのハンガー軸支位置が、当該リンク35aの上下方向の揺動と可動体33の前後移動を伴って垂直に上下移動するように構成された搬送装置において、リンク39の搬送用走行体11側の支軸40の周りで当該リンク39と連動して上下方向に揺動するカム従動ローラー43が設けられ、このカム従動ローラー43を介してリンク39の上下姿勢を規制するカムレール44Aが架設された構成。
(もっと読む)
ウィンドウガラス取付装置
【課題】コンベア上を搬送される車体の所定の取付位置に、自動でウィンドウガラスを取付けることを可能にする。
【解決手段】ウィンドウガラス取付装置10は、ウィンドウガラス300を保持するウィンドウガラス保持装置20と、ウィンドウガラス保持装置を車体200の搬送方向に移動自在に案内する縦ガイド110と、ウィンドウガラス保持装置に取付けられたアーム40で構成される。そして、コンベア100上を搬送される車体200が所定の位置となると、アーム40が車体200に当接することで、ウィンドウガラス保持装置20が縦ガイド110に案内されてコンベア100上を搬送される車体200に追従して移動する。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことができ、且つサイクルタイムを最小に抑えることのできるワーク移し替え装置を提供する。
【解決手段】第1エリアA1に第1のパレット4A〜4Dと第1ハンドリングロボット1を配置し、第2エリアA2に第1のパレット4E〜4Hと第2ハンドリングロボット2を配置すると共に、これら第1エリアA1と第2エリアA2の間に第2のパレット5Bを配置する。そして、何れかのロボット1が第2のパレット5Bにワーク3A〜3Hを移し替える際に、そのロボット1に向けて第2のパレット5Bを回転させるようにする。一方のロボット1による第2のパレット5Bへの移し替えが終了したら、他方のロボット2に向けて第2のパレット5Bを回転させる。
(もっと読む)
車両組立用支持装置、搬送台車、車両組立システム、及び車両の製造方法
【課題】対象物に対して精度良く部品を組付けることが可能な車両組立用支持装置、搬送台車、車両組立システム、及び車両の製造方法を提供すること。
【解決手段】保持手段12によって対象物3を静止状態で支持し、この静止状態の対象物3に対して、部品4を位置決めする位置決め部35を備えているため、この位置決め部35により搬送台車6を介して部品4の位置決めを行う。これにより対象物3に対する部品4の位置決め精度を向上させ、精度良く部品4を組付けることができる。
(もっと読む)
走行設備
【課題】 走行設備の安全性および作業性の向上
【解決手段】 この走行設備10は、所定の走行経路に沿って走行する走行装置15と、床下18で走行装置15に追従して動く追従装置21と、走行装置21の真下を通るように床19に形成した溝20を通して、走行装置15と追従装置21とを連結する連結部22を備えた走行設備において、溝20を閉塞するように溝20に設置し、走行装置21の走行に従動するプレートチェーン30を備えたものである。この走行設備10は、走行装置15の走行に従動するプレートチェーン30により、溝20が閉塞されているから、作業者が溝20に足を取られたり、部品が溝20に落ちたりすることがなく、走行設備10の安全性および作業性が向上する。
(もっと読む)
車両用パネル部材の起立装置と、車両用パネル部材を起立させる方法
【課題】横に寝た姿勢で搬入される車両用パネル部材を起立させ、所定位置まで搬送することのできる起立装置を提供する。
【解決手段】起立装置12は、ガイド部材31に沿って水平方向に移動可能な走行ユニット35と、走行ユニット35を往復移動させる第1の駆動機構36と、走行ユニット35に設けられた回動フレーム40と、回動フレーム40を回動させるための回転機構41と、回動フレーム40に設けられたスライドフレーム45と、スライドフレーム45を移動させる第2の駆動機構46とを備えている。回転機構41は、走行ユニット35が第1ステージS1に位置している状態において回動フレーム40を水平な姿勢にし、走行ユニット35が第2ステージS2に位置している状態において回動フレーム40を垂直な姿勢に回動させる。第2の駆動機構46は、パネル部材Wを第2ステージS2の台車15上に降ろす際、スライドフレーム45を降下させる。
(もっと読む)
搬送装置における被搬送物の位置決め装置
【課題】 被搬送物に底がある場合においても該被搬送物の寸法変化に対応して搬送方向及び搬送幅方向の位置決めをすることができる被搬送物の位置決め装置を得る。
【解決手段】 略水平の支軸Bまわりに個別に揺動可能に支持されると共に揺動半径方向の長さL1,L2・・・が異なる複数の揺動片51,52・・・を支軸B方向に並設し、該複数の揺動片を被搬送物W1が載荷されない状態で所定の作動位置に停止させるように付勢力を付与してなる位置決め手段32を被搬送物支持部に複数設け、位置決め手段32の揺動片の中の一部52に被搬送物W1を載荷して下方に揺動せしめ、被搬送物W1が載荷されない揺動片53,51の先端面53a及び略垂直側面51b又は先端面53aにより被搬送物W1の被位置決め部C1,M1の水平方向の移動を規制して被搬送物W1の水平面内の位置決めを行う。
(もっと読む)
1 - 20 / 20
[ Back to top ]