
Fターム[3D114GA15]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め手段 (485) | 位置補正 (25)
Fターム[3D114GA15]に分類される特許
1 - 20 / 25
ワーク位置決め方法及び装置
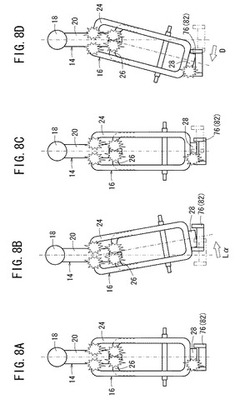
【課題】フレームを精度よく組み立てることができるワーク位置決め方法及び装置を提供する。
【解決手段】溶接を実行する前に、後部フレーム組立体16の前部フレーム組立体14に対する正規姿勢を基準とした位置ズレである変位量Lαと、後部フレーム組立体16を正規姿勢に保持した状態での作用力px(反力)とを計測し、計測した当該変位量Lαと作用力pxとに基づいて、溶接後に後部フレーム組立体16の位置決めを解除したときに後部フレーム組立体16が正規姿勢に戻るようにするための矯正変位量Dを算出し、後部フレーム組立体16を矯正変位させる。
(もっと読む)
車両用ガラスの処理装置

【課題】よりシンプルな構成によって、車両用ガラスを迅速に処理することにある。
【解決手段】位置決め部材20の基準点を搬送部材10の基準位置に配置しつつ位置決め部材20を搬送部材10上に配置するとともに、検出部材70によって、車両用ガラスWの基準点と位置決め部材20の基準点の双方をそれらの上方から検出可能とし、検出部材70が、車両用ガラスWの基準点と位置決め部材20の基準点がずれていることを検出したとき、移動部材によって位置決め部材20を水平方向に移動させて同ずれを補正したのち、車両用ガラスWを持ち上げる構成である。
(もっと読む)
ワークの位置決め装置
【課題】ワークの位置の調整や修正を、低コストで、かつ、簡単に行えるようにする。
【解決手段】ワークを所定位置に位置決めし固定するためのワークの位置決め装置1は、パイプ部41を有する位置決め用基台10と、パイプ部41をクランプする汎用のパイプクランプ51と、パイプクランプ51によってパイプ部に取り付けられるインナパネル保持装置A1,A2とを備えている。パイプクランプ51がパイプ部41をクランプした状態で、インナパネル保持装置A1,A2によってワークを保持することによりワークを所定位置に位置決めする。
(もっと読む)
ウェザストリップ取付け用治具及び取付け方法
【課題】車体フランジ等の対象物に物品が近接配置されている場合であっても、ウェザストリップの取付け作業が容易に行えることを可能にする取付け用治具、及びウェザストリップの取付け方法を提供する。
【解決手段】基部(26)と、この基部に回転可能に支持されるとともに、対象物に対しウェザストリップを押圧可能な押圧面(211)を有する押圧ローラ(21)と、押圧面に作用している力が所定の値未満であるときは押圧ローラを基部に対して回転させず、押圧面に作用している力が所定の値以上であるときは押圧ローラを基部に対して回転可能な状態とするように構成された回転防止手段(267、212)とを有するウェザストリップ取付け用治具である。
(もっと読む)
ガラス調整治具およびガラス調整方法
【課題】車両用サッシュレスドアのドアパネルに組み付けられる窓ガラスの組み付け精度を高めることができるガラス調整治具を提供することを課題とする。
【解決手段】車両用サッシュレスドア1のドアパネル2に組み付けられる窓ガラス3の組み付け位置を調整するためのガラス調整治具20であって、ドアパネル2に取り付けられるフレーム部材30と、ドアパネル2に組み付けられた窓ガラス3の縁部に当接することで、窓ガラス3を位置決めする規制部材50,60を有するガラス位置決め機構40と、を備え、ガラス位置決め機構40は、フレーム部材30に設けられており、フレーム部材30は、ドアパネル2のヒンジ部2a,2aおよびドアロック部2bに係合されることで、ドアパネル2に対して位置決めされる。
(もっと読む)
操縦ロボット
自動車のハンドル(1)に取り付けられる操縦ロボットは、環状の電動機(6)の回転子(5)に取り付けられた自身のハンドル(2)を有している。使用時に回転子の前面に取り付けられているものは、環状の取付板(9)であり、取付ボルト(11)を受け入れるためにわずかに内側に突き出している3つのタブ(10)を備えて構成されている。リング(14)からなる挟着部材(12)は、その周囲に等間隔で配置され、3つの穴を有する放射状の突起(15)を有している。この突起は、前記挟着部材(12)が自動車のハンドル(1)に一時的に取り付けることができるため、3つの挟着固定部材(16)のための取付け具を提供できる。前記固定子は、検査もしくは調査のときに操縦操作する電動機によって駆動される操縦トルクに反作用する一対のトルク反作用の突起(16)を有している。操縦ロボットの中央が開口している構造になっているため、制御装置を搭載したハンドルは通常通りに動作させることができる。 (もっと読む)
ドア支持装置
【課題】 装置構成が簡素かつ小型であり、汎用性が高いドア支持装置を提供する。
【解決手段】 自動車のサイドドア101を車体100に対して組付け又は取り外す際に、サイドドア101を車体100に対して所定の位置に支持するドア支持装置10であって、荷台21を有する台車11と、荷台21に上方へ向けて突設された支柱12と、支柱12に設けられ、サイドドア101を着脱自在かつ変位可能に支持する上支持部材13と、荷台21に高さ調整機構14を介して上下動可能に設けられ、サイドドア101の下端縁101cを支持する下支持部材15とを備えることを特徴とする。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
自動タイヤ組付方法及びタイヤ組付装置
【課題】簡単且つコンパクトな構成で、タイヤの自動組付作業を効率的に行うことが可能な自動タイヤ組付方法及びタイヤ組付装置を提供する。
【解決手段】第1作業機構22によりタイヤWの把持及びナット30の締付けを行うと共に、第2作業機構24によりナット30締付け用の回転駆動力を生成し、この回転駆動力を第1作業機構22のナット締付機構52に伝達することによりナット30を締め付ける。このため、単一の作業機構のみによりタイヤWの把持及びナット30の締付けを行う場合に比べ、第1作業機構22及び第2作業機構24を有効に小型化及び簡素化することができる。また、タイヤWの把持及びナット30の締付けを単一の作業機構(第1作業機構22)により行うため、タイヤWとナット30の相対位置が変化し辛くなり、ナット30の締付け位置の特定が容易となる。
(もっと読む)
タイヤ組付装置及びタイヤ組付方法
【課題】設備全体の小型化及び省コスト化を実現するタイヤ組付装置及びタイヤ組付方法を提供する。
【解決手段】 ナット30を締め付けるための回転駆動力を伝達する第2作業機構24の回転軸Y1を第1作業機構22の回転軸Y2にオフセットさせることにより、ナット締付部126の配置が異なる複数のナット締付ユニット122a、122bそれぞれのナット締付部126に対して前記回転駆動力を伝達することが可能となる。このため、複数のナット締付ユニット122a、122bにおけるナット30の締付けに要する回転駆動力を、単一の回転駆動力生成部78から供給可能である。従って、設備全体の小型化及び省コスト化を実現することができる。
(もっと読む)
車体移載装置
【課題】構造が簡単であるとともに、車体移載装置上の車体側が損傷することを防止する。
【解決手段】車体の前後左右4箇所に対応するように吊下柱21を配置する。各吊下柱21の下端部には、車体をその下面側からリフトして移載するための受け部22を設ける。受け部22は吊下柱21に対して車体の幅方向へ移動可能に取り付ける。吊下柱21には、車体を幅方向に移動させるための移動機構34を設ける。吊下柱21と受け部22との間には、受け部22を移動範囲の中央部に位置決めするための位置決め機構36を設ける。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】左右のキャンバ角の差分を極力低減しつつ、サスペンションアッセンブリをボディに取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】アッセンブリ取り付け方法は、ダンパ取付孔13L,13Rの位置BL,BRを測定し、ボディ10の中心位置BCを算出する手順と、サブフレーム基準穴26L,26Rの位置SL,SRを測定し、サスペンションアッセンブリ20の中心位置SCを算出する手順と、中心位置BCと中心位置SCとが一致するように、ボディ10にサスペンションアッセンブリ20を取り付ける手順とを備える。ボディ10にサスペンションアッセンブリ20を取り付ける手順では、サスペンションアッセンブリ20のサブフレーム21をボディ10に固定するとともに、ダンパアッセンブリ24L,24Rの上端側をダンパハウジング12L,12Rに固定する。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつ小型化できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、サンルーフ部材3を把持して搬送する搬送ロボット4と、ボルトを締め付けるナットランナおよびCCDカメラを有する取付ロボット5と、搬送ロボット4および取付ロボット5を制御する制御装置6と、を備える。制御装置6は、搬送ロボット4を制御して、サンルーフ部材3を把持してボディ2のインナパネル2Aに搬送し、取付ロボット5を制御して、CCDカメラによりサンルーフ部材3のボルト穴およびインナパネル2Aを撮影して、これらボルト穴およびインナパネル2Aの位置を算出し、これら算出した位置に基づいて取付ロボット5の動作を補正して、ナットランナによりサンルーフ部材3の2箇所をインナパネル2Aに固定する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークの位置決めをする際には、作業者による判断や経験(勘やコツ)を活かしながら、位置決めの一部についてパワーアシスト装置に負担させることにより、ワークの位置決め作業に対する作業者の負担を軽減しつつ、位置決め精度の向上と作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】制御装置2aを備え、作業者の作業動作をアシストするべく前記作業者の作業動作に協調して自律的に作動するパワーアシスト装置1の制御方法において、制御装置2aには、一連の作業タスクを複数の作業区間に分割し、作業区間ごとに制御ロジックが設定されるパワーアシスト装置1の制御方法であって、パワーアシスト装置1が自由度を有する作動方向ごとに、制御ロジックが設定される。
(もっと読む)
自動車ボデーの搬送ハンガー装置
【課題】各種の自動車ボデーの車幅方向と高さ方向に対応した支持対応を可能とした汎用性を有する自動車ボデーの搬送ハンガー装置を提供する。
【解決手段】走行レールに吊り下げられるフレーム2の自動車ボデーの外側位置である四隅から下方に垂設した支柱3の下端部に、高さ方向規制用アクチュエータ5により昇降動可能な高さ方向規制受駒4と車幅方向規制用アクチュエータ8により進退動可能な車幅方向規制受駒7とが設けられており、車種センサにより検知した車種に応じて高さ方向規制用アクチュエータ5と車幅方向規制用アクチュエータ8を作動して前記高さ方向規制受駒4と車幅方向規制受駒7とを位置決めする制御盤24を備えた。
(もっと読む)
ワーク移し替え方法、ワーク移し替え装置及びワーク移し替えシステム
【課題】ワークの種類が増えた場合でも作業者による手作業をすることなくワークの移し替え作業を容易に行うことができ、且つサイクルタイムを最小に抑えることのできるワーク移し替え装置を提供する。
【解決手段】第1エリアA1に第1のパレット4A〜4Dと第1ハンドリングロボット1を配置し、第2エリアA2に第1のパレット4E〜4Hと第2ハンドリングロボット2を配置すると共に、これら第1エリアA1と第2エリアA2の間に第2のパレット5Bを配置する。そして、何れかのロボット1が第2のパレット5Bにワーク3A〜3Hを移し替える際に、そのロボット1に向けて第2のパレット5Bを回転させるようにする。一方のロボット1による第2のパレット5Bへの移し替えが終了したら、他方のロボット2に向けて第2のパレット5Bを回転させる。
(もっと読む)
部品搬送・取付け方法及びその装置
【課題】 部品組付け対象物に対して、部品を支持するワーク支持手段の位置が制約を受けないようにし、また、部品を取付ける際に、部品を位置決めするための別の格別な手段を設けなくても済むようにする。
【解決手段】 サイドカーテンエアバッグSを保持するセット治具2に位置決め機構5を設け、この位置決め機構5として、位置決めピン7と係合部材10から構成し、係合部材10とセット治具2側をワイヤ8で連結する。そして、係合部材10を車体Bに取付けた後、ワイヤ8の引出し長さをワイヤ巻取り装置11で検知するとともに、ワイヤ8にかかるテンションの3軸方向の分力を力覚センサ9で検知するようにし、ワイヤの引出し角度を求める。そして、ワイヤ8の引出し長さと引出し角度から、係合部材10と位置決めピン7の位置ずれ量を求めるようにし、この位置ずれ量をゼロにするようセット治具2を移動制御し、最終的に係合部材10と位置決めピン7を連結させることにより、エアバッグS組付時の位置決め機能を持たせる。
(もっと読む)
産業用ロボット装置および同ロボット装置を用いたワーク位置決め装置
【課題】本発明は、コスト負担を抑えた構造で、正規位置からずれたロケータの位置補正が行なえる産業用ロボット装置および同ロボット装置を用いたワーク位置決め装置を提供する。
【解決手段】本発明は、ワーク保持時、所定の姿勢で保ち続けている動作アーム部7の各駆動モータ13a〜13eのトルク値T1を検出し、該トルク値T1と所定の姿勢を保つための駆動モータの目標トルク値T0との差から、ロケータ15の位置が正規位置からずれているかを判定し、ずれがあると、各駆動モータを制御して、ロケータ15の位置ずれを補正する。これにより、別途、外的環境に影響されやすいセンサーを用いずに、ロケータ15の位置ずれが抑えられる。
(もっと読む)
ワーク支持装置
【課題】ワーク支持装置における設備の低コスト化
【解決手段】ワーク支持装置10は、ワーク支持部材11、12を先端部13aに移動可能に配設したロボットアーム13と、ロボットアーム13の先端部13aにおけるワーク支持部材12の動きを適宜にロックするロック装置14と、ロック装置14のロックを解除した状態で、ワーク支持部材12を固定物24に当接させつつロボットアーム13の先端部13aを移動させて、ロボットアーム13の先端部13aにおいて、ワーク支持部材12の位置を相対的に変更するワーク支持部材位置変更制御部15とを備えている。このワーク支持装置10によれば、ロボットアーム13とロック装置14を制御し、ロボットアーム13の先端部13aにおけるワーク支持部材12の位置を変更することができる。このためワーク支持部材12にアクチュエータを装備する必要がない。
(もっと読む)
ステアリングホイール位置調整装置及び位置調整方法
【課題】ホイールアライメントを測定、調整する際に、ステアリングホイールを水平位置に迅速かつ正確に調整する。
【解決手段】ステアリングホイール1に傾斜検出器6及び駆動装置7を装着する。傾斜検出器6によってステアリングホイール1の傾斜を検出し、これに基づいてコントローラ8によってステッピングモータ15を制御してステアリングホイール1を回転させる。ステアリングホイール1が右側に傾斜している場合にはステアリングホイール1を左に回転させ、ステアリングホイール1が左側へ傾斜している場合にはステアリングホイール1を右に回転させて水平位置に調整する。このように、ステアリングホイール1を一定方向に回転させて水平位置に調整することにより、ステアリング装置の遊びによる調整精度のバラツキを低減することができ、迅速かつ正確に水平位置の調整を行うことができる。
(もっと読む)
1 - 20 / 25
[ Back to top ]