
Fターム[3D232DA25]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 前後加速度(ジャークを含む) (471)
Fターム[3D232DA25]に分類される特許
121 - 140 / 471
車両用操舵装置

【課題】操舵フィーリングを良好に保ちつつ路面状況が反映された反力制御を行うことができる車両用操舵装置を提供する。
【解決手段】車両用操舵装置の制御装置20に含まれる目標ヨーレート設定部40では、ヨーレート目標値γ* からヨーレート検出値γを差し引いた偏差Δγが大きくなるほど、目標トルクTh* の算出に寄与する操舵用アクチュエータ2に流される電流成分またはその目標値Im* 成分の割合が大きくなるように、偏差Δγに関連付けて設定されたゲインGに基づき、目標トルクTh* が算出される。このことにより、車両がアンダーステア状態である場合、操舵フィーリングを悪化させることなく運転者に対して低μ路であることを正確に認識させる反力トルクを与えることができ、オーバーステア状態の場合、運転者にカウンタ操作を促すガイダンストルクとしての反力トルクを与えることができる。
(もっと読む)
経路推定装置及び運転支援装置

【課題】ドライバに煩わしさを感じさせることなく車両が安全に走行できるように運転支援を行う。
【解決手段】運転支援装置は、車両の現在位置を検出する自車測位装置13と、車両の挙動を検出する自車挙動計測装置11と、現在位置j、時間k、予測位置i、挙動bをそれぞれ離散化した場合の各々の組み合わせについて、車両が現在位置jで挙動bの状態である場合に時間k経過後に予測位置iにいる確率pを示した確率データを記憶する記録媒体21と、検出された現在位置において車両が検出された挙動である場合に、記録媒体21に記憶された確率データに基づいて、検出された現在位置から所定時間までに確率pが所定の閾値以上となる予測位置を車両経路として推定する自車経路推定装置41と、推定された車両経路を車両が走行すると障害発生の可能性がある場合に、警報を発生することで運転支援を行う支援インタフェース装置50と、を備えている。
(もっと読む)
電動パワーステアリング装置
【課題】車両挙動の安定性の制御と、運転者の負担軽減のための制御との間で、調和をとって車両挙動の安定性を良好とする電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置を制御するECUのEPS制御部は、操舵トルクTSと車速VSにもとづいて操舵補助力を出力するように制御するベース電流算出部31の他に、車両挙動の安定性向上のアクティブ制御をする第1制御部を構成するハンドル戻し制御部32、アンダステア制御部33、オーバステア制御部34、ヨーレート反力制御部35、及びスプリットμ制御部36と、運転者のハンドル操作の負担を軽減するための制御をする第2制御部を構成する外乱抑制制御部37、車体流れ制御部38を含んでいる。そして、第1制御部が作動している場合には、第2制御部の出力のゲインを第1制御部の出力が所定値以上でゼロとする。
(もっと読む)
車両用操舵装置
【課題】操舵時に衝突してエアバッグが作動した場合にも、腕部が運転者の胸部等に干渉するのを防止できるようにした車両用操舵装置を提供する。
【解決手段】ステアリングホイール12の転舵状態で車両の衝突状態を検出した場合に、メインエアバッグ4の展開に先行して操作部12Hを握った運転者の手部Dhを把持して拘束するサブエアバッグ9と、メインエアバッグ4の展開に先行してステアリングホイール12を直進走行状態に戻すステアリングホイール回動手段と、を備える。
(もっと読む)
運転支援装置
【課題】運転者に煩わしさを感じさせずに、運転者の身体的な状態及び運転者の運転状態の少なくともいずれかに応じて自車両が走行する経路を誘導することが可能な運転支援装置を提供する。
【解決手段】停車候補地点探索部34が運転者の身体的な状態又は運転者の運転状態に応じて自車両が停車可能な停車候補地点を探索し、ドライバ出力部36又はステアリングアクチュエータ43が自車両を停車候補地点に誘導し、ドライバ入力部33が自車両の目的地点を取得し、走路決定部35が目的地点と停車候補地点とを比較し、当該比較結果に応じてドライバ出力部36又はステアリングアクチュエータ43に自車両を停車候補地点に誘導させるか否かを決定するため、運転者に煩わしさを感じさせずに、運転者の身体的な状態及び運転者の運転状態の少なくともいずれかに応じて自車両が走行する経路を誘導することが可能となる。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動車において、コーナリング時のステア特性に応じて各車輪の最適な駆動力を制御する
【解決手段】電気自動四輪車10において車両制御装置100は、各車輪に対して制御すべき制御前後力FXi’を算出する駆動力演算部129を備える。実ヨーモーメントからステア特性を判定するステア特性判定部122を備える。ステア特性判定部122は、電気自動四輪車10のコーナリング時に、ヨーモーメント演算部125で演算された電気自動四輪車10のヨーモーメント、センサ部110から出力された操舵角δ、車速V、ヨーレートγ、加速度aX 及び加速度aY に基づいて、電気自動四輪車10のステア特性を判定する。駆動力演算部129は、ステア特性判定部122による判定結果に応じて、各車輪に対して制御すべき制御前後力FXi’を変更する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者の運転操作の意図や自車両の周囲環境に適していない制御介入がなされることによって制御介入に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、障害物に車両1が接触することを回避するための車両1の走行経路を回避経路として算出し、運転者の運転状態の危険度と車両1の走行環境の危険度とに基づいて算出された回避経路を自車両が走行するために必要な自車両の制御量を補正し、補正された制御量に従って車両1の走行状態を制御する。このような構成によれば、運転者の状態と車両1の周囲環境の危険度の両方を考慮して運転者の運転操作を支援することができるので、制御介入に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両接地面摩擦状態推定装置及びその方法
【課題】タイヤの摩擦限界に対する余裕度をより適切に推定する。
【解決手段】車両状態推定装置は、接地面において前記車輪のセルフアライニングトルクと前記車輪のスリップ度との比である入力を設定するためのタイヤスリップ角演算部43、セルフアライニングトルク演算部45及びセルフアライニングトルク−スリップ角比演算部46と、その入力を基に、車輪のグリップ特性を示すグリップ特性パラメータである出力を決めるためのトルク勾配演算部48及びμ勾配演算部49を備える。
(もっと読む)
車群走行システム及び車群走行装置
【課題】車群走行において先行車両が受ける空気流を利用することができる車群走行システム及び車群走行装置を提供する。
【解決手段】先行車両である自動車10aの下面には、合計6枚の導風板20a〜20fが自動車10aの下面から路面に対して垂直に突出するようにして備えられている。先行車両である自動車10aの導風板20a〜20fが、自動車10aの走行時に自動車10aが受ける空気流を整流し、空気流を自動車10aの後続車両である自動車10bが有するエアインテーク30に導くため、自動車10bはエアインテーク30から自動車10aからの空気流を効率良く受けることができる。
(もっと読む)
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
路面μ推定装置及びその方法
【課題】スリップが発生する前に、走行路面の路面μを推定する。
【解決手段】路面μ推定装置は、走行時の車輪のセルフアライニングトルクを検出するセルフアライニングトルク検出部1と、走行時の車輪のスリップ角を検出するスリップ角検出部2と、検出したセルフアライニングトルクとスリップ角との比、基準路面について車輪のセルフアライニングトルクと車輪のスリップ角との相関関係、及び検出したセルフアライニングトルク又は検出したスリップ角の少なくとも一方を基に、該セルフアライニングトルクと該スリップ角との関係を推定する路面μ算出部3と、を備える。
(もっと読む)
舵角比可変制御装置
【課題】旋回走行中にアクセル操作やブレーキ操作を行っても運転者に過大な操舵負担のかからない舵角可変制御装置を提供する。
【解決手段】ステアリングホイールの操舵角θsと前輪を転舵する目標ピニオン角θpとのVGSレシオn(V)を車速Vに応じて可変制御するVGS制御装置10において、補正係数設定部15は、旋回走行中にステアリングホイールを一定角度に保舵する場合における前後加速度Gに応じた補正係数k1と、旋回走行中にステアリングホイールを過渡的に操舵する場合における前後加速度Gに応じた補正係数k2とを設定した上で、補正係数kを設定し、VGSレシオ補正部13は、VGSレシオ設定部11によって設定されたVGSレシオn(V)に補正係数kを乗算することにより、前後加速度Gによるヨーレイト変化が生じないようにする。
(もっと読む)
電動パワーステアリング装置
【課題】カント路を直進走行しているときの操舵フィールをより良好にする。
【解決手段】少なくとも操舵トルクに応じてアシストモータ31による操舵アシスト量を制御する電動パワーステアリング装置1において、操舵トルクを検出する操舵トルクセンサ7と、車両が直進走行中か否かを判定する直進クルーズ走行判定部14と、操舵アシスト量を補正する補正量算出部16と、を備え、補正量算出部16は、直進クルーズ走行判定部14により直進走行中であると判定されている場合に、操舵トルクセンサ7で検出される操舵トルクが予め設定された目標操舵トルク以下になるように操舵アシスト量を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】車体流れ抑制制御を終了する過程で良好な操舵フィールを得ることができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルクに応じてアシストモータ31に対するEPS基本制御量EPS_Baseを制御するEPS基本制御部11と、カント路走行中の操舵トルクに応じてEPS基本制御量EPS_Baseを補正する補正量算出部16とを備える電動パワーステアリング装置1において、補正量算出部16によるEPS基本制御量EPS_Baseに対する補正制御を終了させるべくEPS基本制御量EPS_Baseに対する補正量を低減する過程で、操舵トルクが増加しているときは操舵トルクが増加していないときと比較して前記補正量の低減度合いを小さくする。
(もっと読む)
電動パワーステアリング装置
【課題】車体流れを過不足なく適正に抑制することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルクに応じてアシストモータ31に対するEPS基本制御量EPS_Baseを制御するEPS基本制御部11を備え、カント路走行中の操舵トルクに応じてEPS基本制御量EPS_Baseを補正する電動パワーステアリング装置1であって、操舵角センサ5の出力信号を時間微分することにより操舵角速度を算出し、この操舵角速度の絶対値が大きいほど、EPS基本制御量EPS_Baseに対する補正量を減少するように補正する。
(もっと読む)
車両用の運転ダイナミクスコントロールシステム
この発明は、車両用の運転ダイナミクスコントロールシステムに関し、一方では目標値仕様を、そして他方では、運転状態変数を、入力データとして与えられる少なくとも1つの運転ダイナミクスコントローラを有し、また ドライバーと無関係に調整可能な車両の前および/または後車軸におけるステアリングのように、車両の原動力をコントロールし、規定し、また変更することができる複数のアクチュエータを有する。
ドライバーと無関係に調整可能なシャシ、ドライバーと無関係に調整可能なブレーキ、およびドライバーと無関係に調整可能な運転列を有し、運転ダイナミクスコントローラは、目標値仕様および運転状態変数から中央コントロール仕様を決定し、さらにアクチュエータを駆動するために操作変数内にコントロール仕様を分配する分配アルゴリズムにそれを供給する。
アクチュエータ(1、、m)の操作変数(u)に対するコントロール仕様(ν)の最適分配を提供するために、それは、現在のコントロール可能性、アクチュエータ(1、、m)の現在のアクチュエーティング速度、およびコントロール仕様(ν)の実行に対するそれらの可能性ある貢献を考慮するために操作変数(u)を生成する場合に、分配アルゴリズム(C)が、アクチュエータ(1、、m)の状態を与えられるという、この発明によって提供される。
(もっと読む)
自動車の車両姿勢制御装置及び制御方法
【課題】タイヤに発生するタイヤ横力を直接検出し、当該タイヤ横力情報を用いて、指令値の追従性能を向上させるための自動車の車両姿勢制御装置及び制御方法を提供すること。
【解決手段】本発明に係る車両姿勢制御装置は、自動車の前後輪に装着された2つのタイヤ横力センサ内蔵ハブユニットであって、そのハブユニットの軸受に作用する荷重から前後輪のタイヤ横力を検出する2つのタイヤ横力センサ内蔵ハブユニットと、2つのタイヤ横力センサ内蔵ハブユニットから検出された前後輪のタイヤ横力、自動車の車両重心から前後輪軸の距離、及び自動車の左右の駆動力差を用いたヨーモーメント間の所定の関係式を用いてヨーレートを制御するヨーレート制御手段とを備える。
(もっと読む)
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 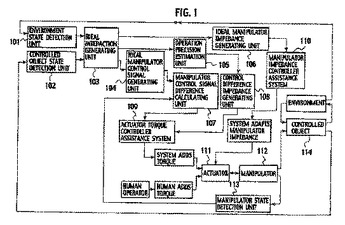 (もっと読む)
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】制御介入開始時に制御介入に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ11が、障害物に車両1が接触することを回避するための車両1の目標操舵角の時系列変化を回避操舵パターンとして算出し、車両1の運転者の運転操作量に基づいて算出された回避操舵パターンを補正し、補正された回避操舵パターンを実行するために必要な車両1の制御量に従って車両1を制御する。このような構成によれば、運転者による回避操作開始時の操舵角及び操舵角速度に回避操舵パターンが滑らかに接続され、制御介入開始時の運転者の運転操作を回避操舵パターンに反映させることができるので、制御介入開始時に制御介入に対し運転者が違和感を感じることを防止できる。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
121 - 140 / 471
[ Back to top ]