
Fターム[3D232DA25]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 前後加速度(ジャークを含む) (471)
Fターム[3D232DA25]に分類される特許
61 - 80 / 471
車両接触回避支援装置
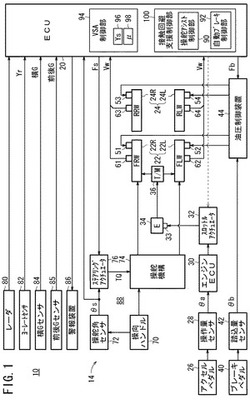
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
車両用制御装置

【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
路面情報取得装置
【課題】 取得した路面情報を多様な状況において有効に利用することができる路面情報取得装置を提供する。
【解決手段】 走行制御ECU1は、車両の走行位置を取得する走行位置取得部12および摩擦係数を算出する摩擦係数算出部13を備える。さらに、取得した摩擦係数を含む路面情報を走行位置に関連付けて記録する路面情報記録部14を備える。さらに、車両がグリップ状態にあるか非グリップ状態にあるかを判定するグリップ状態判定部11を備える。路面情報記録部14は、車両がグリップ状態にある場合と非グリップ状態にある場合とで区別して路面情報を記録する。
(もっと読む)
車両の走行制御装置および車両の走行制御方法
【課題】障害物を回避する走行制御において、制御に対する違和感の低減と、運転者が得られる安心感との両立を図る。
【解決手段】走行制御部39は、生成された回避軌道に基づいて自車両の走行制御(操舵反力制御)を行う。リスク演算部34は、生成された回避軌道を処理対象として、障害物および車両の運動状態に基づいて、リスク(障害物との接触可能性)を演算する。そして、制御量調整部37は、リスクおよび操舵トルクに基づいて、走行制御部39による制御量を調整する。ここで、走行制御部39は、軌道偏差がゼロの状態におけるハンドルの回転位置を基準位置として、この基準位置からのハンドルの回転角度の増加に応じて操舵反力を増加させている。この場合、制御量調整部37は、障害物に対するリスクが大きい程、走行制御部39によるハンドルの回転角度の増加に対する操舵反力の増加量を大きく調整する。
(もっと読む)
車両走行支援装置
【課題】車両特性の変化を直接的に解析することなく、車両移動量の推定精度の向上を図る。
【解決手段】経路演算部12は、車輪速センサ21によって検出された車輪速に基づいて車両の走行軌跡の曲率ρvを算出するとともに、舵角センサ28によって検出された前輪の転舵角δとに基づいて曲率ρstを算出する。また、経路演算部12は、算出した各曲率ρv,ρstの信頼度をそれぞれ評価し、この評価結果に基づいて微小時間の曲率を決定する。そして、経路演算部12は、決定された所定区間の移動量に基づいて自車両の自己位置を推定する。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車両挙動制御装置
【課題】ステアリングの操舵力に関する情報に基づいてドライバの旋回意思を判定しその結果に応じて車両挙動を制御する車両挙動制御装置において、路面反力トルクの信頼性を考慮し適正な挙動制御が行われるようにする。
【解決手段】車輪偏向時に操舵輪が路面から受ける反力トルクである路面反力トルクを検出する路面反力トルク検出手段11、車両の左右車輪速を検出する左右車輪速検出手段、左右車輪速検出手段の出力である左右車輪速から左右車輪速差を演算する左右車輪速差演算手段15、路面反力トルクに基づいて車両の第一の旋回度を演算する第一旋回度演算手段16、左右車輪速差に基いて車両の第二の旋回度を演算する第二旋回度演算手段17、及び第一の旋回度及び第二の旋回度に基づいて路面反力トルクの信頼性を判定する路面反力トルク信頼性判定手段18を備え、路面反力トルク信頼性判定手段の判定結果に基づいて車両の挙動制御が適正化制御される。
(もっと読む)
車輪位置変更装置
【課題】 路面段差通過時など大きな入力があった場合でもその衝撃を吸収しながら車両挙動をより安定にすることができる車輪位置変更装置を提供する。
【解決手段】 車輪位置変更装置は、車輪を懸架する複数の懸架手段と、各懸架手段に設けて車体に対する車輪の向きを変更する車輪向き変更手段と、各懸架手段に設けた車輪を駆動する駆動手段と、懸架手段を車体に対して目標位置に移動させる車輪位置変更手段と、を備え、車輪位置変更手段が、懸架手段を目標位置に向かわせる復元力を目標位置から第1の閾値分離れた範囲内では小さく、この範囲外では大きくなるように制御する。
(もっと読む)
加加速度情報を用いた車両の運動制御方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモ
ーメント量を調整すること。
【解決手段】入力された横方向の加加速度(Gy_dot)を、入力された車両の前後方向の速度(V)で除した値(Gy_dot/V)に対して、さらに入力された車両の横加速度(Gy)で除した値に比例した物理量に基づいて、車両の前後加速度の制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。また、上記の車両の横方向の加加速度(Gy_dot)は、入力された横加速度を(Gy)をもとに求めること。また、入力された車両の横方向の加加速度(Gy_dot)に、速度(V)及び横加速度(Gy)から決定され、予め記憶されたゲイン(KGyV)を乗じ、乗じた値に基づいて、車両の前後加速度を制御する制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。
(もっと読む)
車両挙動センサの中点補正方法
【課題】中点学習を必要とし、車両走行中に中点学習を実施する車両挙動センサの誤学習の発生を抑制できる中点補正方法を提供する。
【解決手段】車両挙動センサの中点補正方法は、車両挙動センサの出力値から中点補正値が順次算出される中点補正算出工程と、中点補正値として略同等の値が連続して算出された場合には中点補正が実施され、前回の中点補正値と今回の中点補正値とが異なる場合には中点補正が実施されない中点補正判定工程とを有する。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
車両挙動センサの中点学習方法と車両挙動検出システム
【課題】車両挙動センサの温度変化の影響を回避して車両挙動センサの中点学習ができる車両挙動センサの中点学習方法と車両挙動検出システムを提供する。
【解決手段】VSA_ECUは、エンジンルーム内に設置され、ヨーレートセンサSYと、ヨーレートセンサ温度TYを検出する温度センサSTYを有する。エンジン制御ECUから吸気温度を外気温度TAirとしてCAN通信50を介して取得する。中点学習条件成立判定部42は、中点学習条件を満たしていると判定した場合に、中点決定部43に中点学習許可の信号を出す。中点決定部43は、ヨーレートセンサ温度TYと外気温度TAirとの差が、予め決められた閾値未満のときは、ヨーレートセンサSYからの信号を中点値として取得して、学習中点記憶部44に出力して、記憶させる。ヨーレートセンサ温度TYと外気温度TAirとの差が、閾値以上の場合は、中点値として取得しない。
(もっと読む)
車両のトー角制御装置
【課題】 車両のトー角制御装置において、アクチュエータの機械的なガタの範囲内における制御が過剰となることを防止する。
【解決手段】 自動車100の各車輪3のトー角を個別に変化させる電動アクチュエータ8と、自動車100の操舵角、車速、ヨーレイト等を検出する各種センサ10〜17とを有し、操舵角、車速、ヨーレイトに基づいて電動アクチュエータ8の目標制御量を設定し、目標制御量に基づいて電動アクチュエータ8を駆動制御するトー角制御装置6であって、自動車100が走行する路面上の障害物と車輪3とが接触することによって電動アクチュエータ8に負荷が加わることと予測されるときに、目標制御量を低減させるべく補正係数を設定する補正係数設定部53と、補正係数に応じて目標制御量を低減させるべく制御ゲインを低減させる制御ゲイン設定部54とを有することを特徴とする。
(もっと読む)
車両の舵角制御装置
【課題】良好な走行安定性を確保し得る車両の操舵制御装置を提供する。
【解決手段】車両の運転者のステアリング操作に応じて操舵対象車輪の車輪舵角を制御する車両の操舵制御装置において、車両のアンダーステア傾向の強さを示すアンダーステア状態量の増大に応じてステアリングギヤ比を大きくするためのアンダーステア状態量対応ステアリングギヤ比補正係数を設定し、当該設定されたアンダーステア状態量対応ステアリングギヤ比補正係数によって所定の標準ステアリングギヤ比を補正し、当該補正後のステアリングギヤ比とステアリング操作角とに基づいて操舵対象車輪の車輪舵角を演算し、操舵対象車輪の車輪舵角を検出し、上記演算された車輪舵角と上記検出された車輪舵角とが一致するように車輪舵角を制御する。
(もっと読む)
車両の制御装置
【課題】 操舵に対する逆ロールの応答性を確保でき、制動力を向上させることができる車両の制御装置を提供すること。
【解決手段】 旋回方向内側への横移動の反力、あるいは車体の逆ロールによって、車両が受ける反力ロールモーメントを算出する反力ロールモーメント算出部104と、反力ロールモーメントを抑制する平面運動アクチュエータ部108の平面運動制御量目標値を設定する平面運動制御量目標値算出部105と、算出した平面運動制御量目標値に基づいて、平面運動アクチュエータ部108を制御する平面運動制御部106を備えた。
(もっと読む)
車両運動制御システム
【課題】ドライバーの違和感を低減して車両の適正な挙動を確保できる車両運動制御システムを提供すること。
【解決手段】この車両運動制御システム1では、車両10の操舵角に基づき推定された将来の横加速度と、将来の道路情報に基づき推定された将来の横加速度とのうち低い方の横加速度が選択される。また、この選択にて車両10の操舵角に基づき推定された将来の横加速度が選択された場合には、現在の車両状態に基づき推定された車両の将来の座標と将来の道路情報とが用いられて車両10が所定のコースから逸脱するか否かが判定される。そして、この判定にて肯定判定が行われた場合には、将来の道路情報に基づき推定された将来の横加速度が用いられて、目標ヨーレートが算出される。
(もっと読む)
車両用衝突回避装置
【課題】 自車および物体の予測される衝突の態様に応じて的確な回避制御を行う。
【解決手段】 物体検知手段M1が他車を検知し、走行状態検出手段M2が自車の走行状態を検出すると、相対関係算出手段M3が自車に対する物体の相対関係を算出する。衝突可能性判定手段M4が前記相対関係に基づいて自車が他車に衝突する可能性を判定し、衝突可能性が高いと判定された場合には更に他車との衝突が予測される自車の衝突部位と、自車の移動方向および他車の移動方向が成す交差角と、自車が他車に衝突すると予測される衝突予測時刻とを算出する。衝突回避制御手段M5は、衝突予測時刻以前に前記衝突部位および前記交差角に基づいて自車の姿勢を変化させて衝突を回避するので、自車の他車に対する衝突を効果的に回避することができる。
(もっと読む)
61 - 80 / 471
[ Back to top ]