
Fターム[3D232DA25]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 前後加速度(ジャークを含む) (471)
Fターム[3D232DA25]に分類される特許
21 - 40 / 471
車両の制御装置
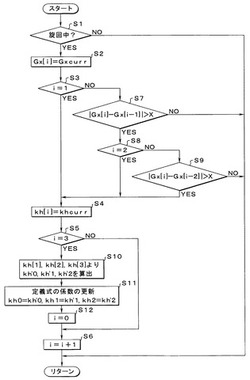
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
車両用制御装置

【課題】車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる車両用制御装置を提供すること。
【解決手段】キャンバ角調整手段によりキャンバ角調整装置44が作動され後輪のキャンバ角が調整されて後輪にネガティブキャンバが付与される。ネガティブキャンバの付与により後輪に発生するキャンバスラストを利用して、車両の走行安定性を確保できる。また、キャンバ角調整手段により後輪にネガティブキャンバが付与される場合に、コーナリングフォース変更手段により前輪の等価コーナリングフォースが変更される。前輪の等価コーナリングフォースが変更されることにより、車両の操縦性の指標である操安キャパシティを変更することができ、車両の操縦性を制御できる。これにより、車両の走行安定性を確保しつつ操縦性を制御し、操舵感を向上できる。
(もっと読む)
車両の操舵力制御装置
【課題】オーバステア状態発生時、運転者のカウンタステア操作を補助するとともに、その後に運転者のカウンタステアの戻し操作をも補助し得る車両の操舵力制御装置の提供。
【解決手段】この装置では、車両が一方向に旋回している場合において、オーバステア状態量Josが増大しながら第1閾値ko1を跨いだことに基づいて、電気モータMTの駆動トルクを利用して車両のオーバステア状態を打ち消す方向の操舵力(第1操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステア操作が補助される。その後、オーバステア状態量Josが減少しながら第2閾値ko2(<ko1)を跨いだことに基づいて、電気モータMTの駆動トルクを利用して第1操舵力と逆方向の操舵力(第2操舵力)がステアリングホイールSWに対して付与される。これにより、カウンタステアの戻し操作が補助される。
(もっと読む)
操舵制御装置
【課題】簡素なシステムで操舵部材へ付与される操舵反力を適切に制御可能な操舵制御装置を提供する。
【解決手段】操舵制御装置1の操向制御部5は、操向制御モータ55を有し、ステアリングホイール角θhに基づいて操向制御モータ55を制御し操舵輪7の操舵角θtを制御する。操舵反力付与部3は、操向制御部5よりもステアリングホイール8側に設けられ、入力軸11の回転を出力軸21へ伝達する差動減速機構30および差動減速機構30を駆動する反力付与モータ45を有し、反力付与モータ45の駆動により、ステアリングホイール8に操舵反力を付与する。これにより、通常時においてもステアリングホイール8と操舵輪7とが機械的に連結されているので、フェイルセーフ手段を別途設ける必要がなく、システムを簡素化することができる。また、ステアリングホイール8へ付与される操舵反力を適切に制御することができる。
(もっと読む)
車両運動制御装置
【課題】車両の走行状態に適した運動制御を、より容易に行うことのできる車両運動制御装置を提供すること。
【解決手段】車両運動制御装置2に、車両1のタイヤ温度を取得するタイヤ温度取得部50と、車両1の運動を制御する運動制御部54と、を備え、運動制御部54は、車両1の走行状態に応じて、タイヤ温度取得部50で取得したタイヤ温度に基づく運動制御と、予め定められた所定値に基づく運動制御とを切替える。これにより、タイヤ温度に基づいて運動制御を行う場合には、走行時に変化するタイヤ温度に基づいて制御することにより適切な制御を行うことができ、所定値に基づいて運動制御を行う場合には、演算時間の短縮を図ったり、ECU40の負荷を低減したりすることができる。この結果、車両1の走行状態に適した運動制御を、より容易に行うことができる。
(もっと読む)
車両制御装置
【課題】加速度に基づいて走行特性を変化させる場合の節度感を良好にすることのできる車両制御装置を提供する。
【解決手段】車両の加速度を検出もしくは推定するとともにその加速度に基づいて、前記車両の駆動力特性と変速特性と操舵特性と懸架特性との少なくともいずれか一つの特性を含む走行特性を変更するように構成された車両制御装置において、前記加速度の時間微分値であるジャークを算出するとともに、そのジャークの大小を判断する禁止判断閾値が前記走行特性に含まれる複数の特性毎に設定されており、前記ジャークがいずれかの特性についての前記禁止判断閾値を超えている場合(ステップS4)にはジャークが超えている禁止判断閾値についての前記特性の変更を禁止するように構成されている。
(もっと読む)
ヨーレート較正装置
【課題】車両の走行状態における規範ヨーレート較正法だけでヨーレートセンサのゼロ点の較正ができるヨーレート較正装置を提供する。
【解決手段】ヨーレート較正装置100Aは、操舵方向を判定する操舵方向判定部15、車速演算部19、直進状態判定部12A、直進走行状態と判定された際の操舵角θHを記憶する操舵角記憶部13A、操舵角記憶部13Aに記憶された操舵角θHの値の分布に基づいて操舵角センサSHAの不感帯領域を演算する操舵角検出不感帯領域演算部14A、不感帯領域と操舵方向判定部15によって判定された操舵方向に基づいて操舵角θHを補正する操舵角補正部16、操舵角−ヨーレート特性データ104bと補正された操舵角θCHと車速VSとに基づいてヨーレートγのゼロ点を較正するヨーレートオフセット量演算部17及びヨーレートゼロ点補正部18と、を備える。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
障害物回避支援装置及び障害物回避支援方法
【課題】運転者の意図に応じた障害物回避支援の解除を確実に反映できるようにする。
【解決手段】自車両前方に回避が必要な障害物を検出すると、その障害物に対する回避軌道を求め、その回避軌道に基づいて自車両を走行制御するための追従操舵力を算出する。その算出した追従操舵力と運転者の操舵力に基づいてアシスト操舵力を算出して障害物回避のための走行制御を行う。そして、上記運転者の操舵力がアシスト操舵力に対抗して保舵する力を超えたことを検出したら、自車両のアシスト操舵力の解除と判定する。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】パワーステアリング構成物、若しくは車両前部構成物等の機械系の共振周波数成分に基づく振動、若しくは騒音の発生をも抑制し得る電動パワーステアリング制御装置を提供する。
【解決手段】電動パワーステアリング装置は、運転者の操舵トルクを補助するアシストトルク10を発生させる制御装置と、トルクセンサ23に内蔵されるバネ共振系とは異なる構成物の機械共振周波数成分を除去し得る共振周波数帯除去手段40を備えている。
(もっと読む)
操舵装置及び操舵制御装置
【課題】状態に応じて運転感覚を変えることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作可能である操舵部材2と、操舵部材2の回転方向の振動を調節可能である調節装置6と、車両の運転状態に応じて調節装置6を制御して操舵部材2の回転方向の振動を調節する制御を実行可能である操舵制御装置8と備えることを特徴とするので、状態に応じて運転感覚を変えることができる。調節装置6は、例えば、操舵部材2に伝達される振動の伝達度合いを調節可能であり、操舵制御装置8は、例えば、操舵部材2に伝達される振動の伝達度合いを調節することで操舵部材2の回転方向の振動を調節することができる。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
後退駐車支援制御装置および後退駐車支援制御装置用のプログラム
【課題】車載カメラによって撮影された車両後方画像から駐車枠線を検出する技術において、ドライバの運転負担を軽減すると共に、車両の後退開始位置までの車両の変位量を検出する必要性を低減する。
【解決手段】後退駐車支援制御装置が、撮影画像から、駐車枠探索範囲のウインドウ31、32を抽出し、抽出されたウインドウの範囲内で、駐車枠線を検出するようになっており、ウインドウ31、32の抽出時は、車両1の現在のステアリング角で基準距離Lだけ後退したと仮定した場合の車両1’の後端部の近傍に限定して、ウインドウ31、32を抽出する。
(もっと読む)
21 - 40 / 471
[ Back to top ]