
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
101 - 120 / 2,877
電動パワーステアリング装置
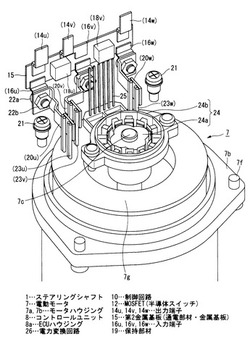
【課題】電動モータの電機子巻線の放熱性を高める。
【解決手段】ステアリングシャフトに操舵補助力を付与する電動モータ7と、該電動モータ7を制御するコントロールユニットとにより構成される。電動モータ7は、筒部を有するモータハウジングに収容される。コントロールユニットは、モータハウジングの軸方向の出力軸7cとは反対側に配置されたECUハウジングと、該ECUハウジングの内部に収容され電動モータ7を駆動制御するためのMOSFETを有する電力変換回路と、ECUハウジングの内部に収容されMOSFET等を制御する制御回路とを備える。MOSFETの出力端子14u,14v,14wと電動モータ7の入力端子16u,16v,16wとを電気接続する第2金属基板15を設け、該第2金属基板15を、モータハウジングの内面に当接させた。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置

【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
モータ駆動装置
【課題】モータ駆動装置におけるECUの小型化を図る。
【解決手段】モータ10の軸方向一端側に、該モータ10の駆動制御に供するECU20が付設されたモータ駆動装置3において、金属基板50の一方の面にモータ10を駆動制御するための半導体モジュール51〜53を実装し、他方の面に一部の電子部品58を実装することにより、パワー回路を構成する半導体モジュール51〜53や電子部品等を複数の基板に分割することなく、金属基板50の面積を小さくすることができるため、ECU20を小型化することが可能となる。
(もっと読む)
電動アクチュエータの電子回路装置
【課題】電動モータに一体に取り付けられる駆動制御ユニット6の出力端子12を、電動モータ側の入力端子に簡単に接続できるようにする。
【解決手段】電動モータのハウジングの端部に駆動制御ユニット6が取り付けられる。駆動制御ユニット6は、一端が開口面11aとなったハウジング11と、複数のバスバーを合成樹脂材料で板状に一体化してなるバスバーモジュール24と、ハウジング11の開口面11a側に位置するようにバスバーモジュール24に重ねて配置された制御基板25とを有する。3つの出力端子12はバスバーモジュール24から垂直に立ち上がっており、その先端部が、3つの片71,72,73に分岐している。左右の第1片71および第2片72が直線状に延びているのに対し、中央の第2片72は板厚方向にオフセットしており、両者間に、電動モータ側の入力端子が挿入される。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
ヨーク組立体及びその製造方法並びにトルク検出装置及び電動パワーステアリング装置
【課題】各ヨークリングを貫通する位置決め孔を設けずに、両ヨークリングを正確に位置決めできるヨーク組立体を提供する。
【解決手段】ヨーク組立体26は、内周に複数の磁極爪37,38が交互に配置された2個一組のヨークリング34,35を樹脂製の保持筒36で一体に保持してなる。保持筒36の内周36aに、軸方向X1に延びる挿通溝50が形成される。挿通溝50の内面50aに、各磁極爪37,38の基部51,52の側面53,54に設けられた被位置決め部55,56が露出している。挿通溝50は、保持筒36の成形型に設けられた位置決めピンを抜き出した後に残る溝である。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面負荷に応じた操舵反力の特性の実現と、車両全体としての適切な操作安定性の実現とを両立させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】ベースアシスト部20は、路面反力に応じた操舵反力がハンドル側に返ってくるようにするためのベースアシスト指令Tb*を生成し、補正部30は、車両の不安定な挙動が適切に収斂するようにベースアシスト指令Tb*を補正するための補正トルク指令Trを生成する。そして、これら各指令Tb*,Trの和が最終的なアシストトルク指令Taとなる。ベースアシスト部20は、自身が生成したベースアシスト指令Tb*と実際に検出された操舵トルクTsに基づいて路面負荷を推定し、その推定した推定負荷Txに基づいて目標操舵トルクTs*を生成し、その目標操舵トルクTs*と操舵トルクTsの偏差に基づいてベースアシスト指令Tb*を生成する。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
電動パワーステアリング装置
【課題】小型で高い減速比が得られる減速機を用いることにより、搭載スペースを小さくすることが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置201は、ピニオンシャフト6の回転軸Loを中心に回転可能に支持された第一部材20と、外周面に外歯歯車71が形成された軸部材70と、外歯歯車71と噛み合う内歯歯車41が内周面に形成された環状部材30と、ハウジングHに固定された円盤部材50と、環状部材30の自転成分のみを円盤部材50に伝達する伝達機構を備える。外歯歯車71は、内歯歯車41と歯数が異なる。第一部材20には、環状部材の中心が回転軸Loから所定の距離になる位置に環状部材30を収容する収容孔21が形成される。環状部材30は、第一部材20に対して相対回転可能な状態で収容孔に収容される。モータ160は、第一部材20の外周面のアウタロータ142と、ステータ141を備える。
(もっと読む)
ウォームギヤ機構及びウォームギヤ機構の製造方法
【課題】ウォームギヤ機構の噛み合いを良好にすること。
【解決手段】ステアリングホイールの操舵入力に基づいて電動モータ43が発生したトルクを、転舵用車輪に伝達するためのウォームギヤ機構44である。該ウォームギヤ機構は、電動モータに連結される金属製のウォーム70と、該ウォームに噛み合う樹脂製のウォームホイール80とから成る。無負荷状態において、ウォームとウォームホイールとは、ウォームホイールの歯81の歯面がウォームの歯71の歯面に押し付けられて弾性変形をすることが可能な範囲で、歯面同士が押し付け合うように組み付けられている。
(もっと読む)
電動パワーステアリング制御装置
【課題】制御系全体の安定化のために制御系に設ける補償機能を簡素な構成で実現できるようにすることを目的とする。
【解決手段】目標アシストトルク演算部20にて目標アシストトルク(目標電流)を演算し、モータ6の実電流Imをその目標電流に一致させるための電流指令である基本指令を電流制御部120が演算する構成において、目標アシストトルク演算部20に位相補償器を設けていた従来の構成に対し、目標アシストトルク演算部20には位相補償器を設けず、代わりに電流制御部120に対して電流安定化補償器31をアドオンする。電流安定化補償器31は、伝達関数がs(微分演算子)の4次以下の関数で表されるものであり、実電流Imに基づき、制御系全体を安定化させるための補償指令を生成する。そして、基本指令が補償指令によって補償されてなる電流指令が、駆動回路130に入力される。
(もっと読む)
電動パワーステアリング装置
【課題】小型で高い減速比が得られる減速機を用いることにより、搭載スペースを小さくすることが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、ステアリングシャフトの回転軸Loを中心に回転可能に支持された第一部材20と、外周面に外歯歯車71が形成された軸部材70と、外歯歯車71と噛み合う内歯歯車41が内周面に形成された環状部材30と、ハウジングHに固定された円盤部材50と、環状部材30の自転成分のみを円盤部材50に伝達する伝達機構を備える。外歯歯車71は、内歯歯車41と歯数が異なる。第一部材20には、環状部材の中心が回転軸Loから所定の距離になる位置に環状部材30を収容する収容孔21が形成される。環状部材30は、第一部材20に対して相対回転可能な状態で収容孔に収容される。モータ140は第一部材20の外周面のアウタロータ142と、ステータ141を備える。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの取付位置に変更に拘らず、共通の制御基板を用いることが可能であって且つ小型の電動パワーステアリング装置を提供する。
【解決手段】操舵軸3を回転可能に支持するステアリングコラム15(外枠)に、トルクセンサ19と電動モータ12とが保持されている。電動モータ12の駆動を制御する制御回路30が実装された制御基板29が、操舵軸3の中心軸線C1に平行な第1方向X1の第1端部31と第2端部32とに、それぞれ、トルクセンサ19に択一的に接続可能な第1端子群G1と第2端子群G2とを設けている。第1方向X1に直交する第2方向X2の一端部(第3端部33)に、電動モータ12に接続可能な第3端子群G3が設けられる。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
逆入力荷重検出装置および逆入力荷重記録装置
【課題】車両の走行中に転舵機構に入力される逆入力荷重を検出することができる逆入力荷重検出装置を提供する。
【解決手段】ラックハウジング18に一体的に形成されたマウントブラケット20に、圧電素子35が内蔵されたマウントブッシュ32が装着されている。ECU40は、圧電素子35から発生した電荷に基づいて転舵機構5に入力された逆入力荷重を検出するための逆入力荷重検出回路43と、不揮発性メモリ45と、逆入力荷重検出回路43によって検出された逆入力荷重を不揮発性メモリ45に記憶するためのマイクロコンピュータ44とを備えている。
(もっと読む)
ステアリング装置の設計支援装置及びステアリング装置設計支援方法
【課題】チューブヨーク及びシャフトヨークの既存部品を活用し、インターミディエイトシャフトを有するステアリング装置の設計を支援するステアリング装置の設計支援装置及びステアリング装置設計支援方法を提供する。
【解決手段】ステアリング装置の設計支援装置1は、チューブヨークの候補部品とシャフトヨークの候補部品とを組み合わせた嵌合長JWが、嵌合長の条件を満たす場合、表示装置3が決定ボタン251を表示する。決定ボタン251を選択する場合、設計者が選択する図を決定した情報を制御装置4が受け付けることができる。
(もっと読む)
101 - 120 / 2,877
[ Back to top ]