
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
121 - 140 / 2,877
ステアリング装置の設計支援装置及びステアリング装置設計支援方法
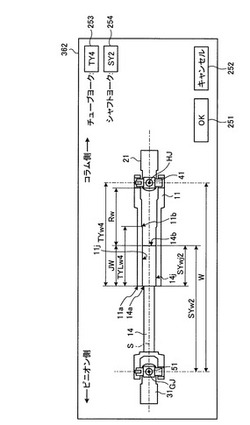
【課題】チューブヨーク及びシャフトヨークの既存部品を活用し、インターミディエイトシャフトを有するステアリング装置の設計を支援するステアリング装置の設計支援装置及びステアリング装置設計支援方法を提供する。
【解決手段】ステアリング装置の設計支援装置1は、チューブヨークの候補部品とシャフトヨークの候補部品とを組み合わせた嵌合長JWが、嵌合長の条件を満たす場合、表示装置3が決定ボタン251を表示する。決定ボタン251を選択する場合、設計者が選択する図を決定した情報を制御装置4が受け付けることができる。
(もっと読む)
モータ制御装置及びこれを備える電動パワーステアリング装置。

【課題】三相ブラシレスモータを二相駆動する際に効率よく駆動電圧をモータの正常相に印加することのできるモータ制御装置及びこれを備える電動パワーステアリング装置を提供する。
【解決手段】信号出力部は正常相を二相駆動するに際し、ロータの回転に伴って各正常相に発生する誘起電圧と相似する正弦波の駆動電圧を誘起電圧に追従する態様で各正常相に対し印加すべく制御信号の生成態様を変更する制御信号変更処理を実行する。
(もっと読む)
操舵反力生成装置、車両及び操舵反力生成方法
【課題】基準ラック軸力をより高精度に推定すること。
【解決手段】基準ラック軸力演算部15Bの車体持ち上げエネルギ演算部15aは、操舵角に基づき、転舵されることにより発生する車体1Aの上下方向の変位による車体持ち上げエネルギを算出し、タイヤ摩擦エネルギ演算部15bは、操舵角に基づき、転舵によってそれら転舵輪と走行路面との間に発生する摩擦によるねじりトルクを算出し、セルフアライニングエネルギ演算部15cは、操舵角及び車速に基づき、セルフアライニングトルクを算出し、加算部15dは、車体持ち上げエネルギ、ねじりトルク、セルフアライニングトルクを加算して総エネルギ量を求め、ラック軸力演算部15eは総エネルギ量とラックストローク量とに基づき基準ラック軸力を推定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
電動パワーステアリング装置
【課題】ウォーム減速機にシール構造を採用しても大型化することなく、操舵フィーリングの低下を抑制できる電動パワーステアリング装置を提供する。
【解決手段】ウォーム減速機のウォーム16の回転軸は、モータの出力軸と継合するためのカップリング26に固定されている。ウォーム16とウォームハウジング20との間に介装されウォーム16を支持する軸受21は、ウォームハウジング20に嵌着され、軸受予圧用ナット24により締め付け固定されている。軸受予圧用ナット24には、円形状のシール材25が螺合され、軸受21の外周面に一体形成されている。シール材25は、金属あるいは樹脂材料により形成され、ウォーム16の回転軸および軸受21に摺接している。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
電動パワーステアリング装置
【課題】容易な構成であって、搭載スペースを小さくすることができる揺動内接式遊星歯車装置を用いた電動パワーステアリングを提供する。
【解決手段】ハウジングHに支持された電動モータ40と、電動モータ40と同軸的に配置され電動モータ40の駆動力を減速してピニオン軸を駆動する減速機60とを備える。減速機60には、揺動内接式遊星歯車装置が適用される。揺動内接式遊星歯車装置の内歯歯車121の内歯および外歯歯車130,140の外歯は、インボリュート歯形に形成される。そして、駆動状態において、内歯歯車121の内歯本体121aおよび外歯歯車130,140の外歯本体131,141の一方が周方向に伸張弾性変形し且つ他方が収縮弾性変形することにより、内歯121bと外歯132,142の噛み合い数が、非駆動状態における内歯121bと外歯132,142との噛み合い数よりも多くなるように設定されている。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】複数の演算制御装置による車両制御において、異常状態から正常状態への復帰を適切に行うことができる車両制御システムおよび車両制御方法を提供することを課題とする。
【解決手段】本発明は、通信手段により互いに通信可能に接続された第1演算制御装置と第2演算制御装置とを備える車両制御システムであって、第2演算制御装置は、第1演算制御装置により演算された第1の目標制御量と、第2演算制御装置により演算された第2の目標制御量との差が、第1閾値以下である場合は、通信状態が正常であることを示す監視結果を、第1演算制御装置へ送信し、第1演算制御装置は、第2演算制御装置により送信された監視結果が正常であり、かつ、第1の目標制御量が第2閾値以下であると判定した場合、第2演算制御装置に転舵制御を実行させる。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
多相回転機の制御装置、及びこれを用いた電動パワーステアリング装置
【課題】 回転角センサの取り付け位置ずれ等による角度誤差を、多相回転機を搭載対象に搭載したままの状態で検出する多相回転機の制御装置を提供する。
【解決手段】 3相モータ(多相回転機)の制御装置であるマイコンは、モータに取り付けられた回転角センサの取り付け位置ずれ等による角度誤差Δθを算出する処理を実行する。まず、d軸およびq軸電流指令値を0アンペアに設定する(S00)。次に、モータの回転軸を外部から回転させ(S10)、逆起電圧によって流れる相電流を検出し(S30)、3相2相変換する(S40)。制御器は、電流検出値が0アンペアになるように電圧指令値Vq、Vdを出力する(S50)。角度誤差算出手段は、電圧指令値Vq、Vdに基づいて角度誤差Δθを算出し(S70)、角度補正値として記憶する(S90)。以後、回転角センサの検出値から補正値を差し引いて補正する。
(もっと読む)
電動パワーステアリング制御装置
【課題】自然なフィーリングを実現することが容易な電動パワーステアリング装置を提供する
【解決手段】アシストトルクを決定するアシスト決定部120は、ハンドルトルク推定値Thに基づいてハンドル側アシストトルクを決定するハンドル側アシスト決定部121と、路面反力トルク推定値Tlに基づいて路面側アシストトルクを決定する路面側アシスト決定部122とを備え、ハンドル側アシスト決定部121をフィルタとし、路面側アシスト決定部122は、路面反力トルク推定値Tlを定数倍する増幅器とする。
(もっと読む)
モータ制御装置
【課題】電流検出回路に故障が発生した場合でも、モータ制御の正常な動作を維持することができるモータ制御装置を提供する。
【解決手段】モータ制御装置は、インバータ回路1と、シャント抵抗Rsに流れるモータ電流を検出する第1電流検出回路10および第2電流検出回路20と、電流検出回路10、20の出力に基づいてモータ電流の検出値を算出するとともに、目標値のモータ電流を流すための指令値をPWM回路2へ出力する制御部3とを備える。第1電流検出回路10は正の第1ゲインを有し、第2電流検出回路20は第1ゲインを反転した負の第2ゲインを有する。制御部3は、第1電流検出回路10の出力に基づき算出した第1検出値と、第2電流検出回路20の出力に基づき算出した第2検出値とを用いて、電流検出回路の異常有無と、いずれの電流検出回路が異常であるかの判定を行い、正常な電流検出回路の検出値に基づいてモータ制御を行う。
(もっと読む)
電動パワーステアリング装置
【課題】インバータ装置を構成しているスイッチング素子に過電流が流れた場合でも、昇圧回路を構成するスイッチング素子を保護することができる電動パワーステアリング装置を提供すること。
【解決手段】インバータ装置に流れる少なくとも1相以上の電流値が所定値1(I0)以上になった場合(ステップ、S101:YES)が、所定時間T1以上経過(ステップ、S102:YES)し、かつ、出力電圧検出手段から検出した出力電圧が所定値2(V1)以下になった場合(ステップ、S103:YES)には、第1および第2のスイッチング素子のオン/オフ比を50%に制限する(ステップ、S104)。昇圧回路の第1、および第2のスイッチング素子のオン/オフ比を50%に制限するので、昇圧回路内に流れる電流の急激な増加を抑えることができる。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、トルクリップルを抑制しつつ、インバータおよび巻線組の過熱を防止する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電力を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出し、温度推定器751、752は、相電流検出値の積算値からインバータまたは巻線組の温度を推定する。電流指令値制限手段20は、推定温度Tm1、Tm2に基づいて、電流指令値Id*、Iq*の上限を2系統共通に制限する。これにより、トルクリップルを増大させることなく、インバータおよび巻線組の過熱を適切に防止することができる。
(もっと読む)
パワーステアリング装置
【課題】トルクセンサの検出精度が維持されるパワーステアリング装置を提供する。
【解決手段】ステアリングシャフト10に入力される操舵トルクを磁気を介して検出する非接触式のトルクセンサ4を備えるパワーステアリング装置1であって、ステアリングシャフト10は、入力シャフト11と出力シャフト13の間で操舵トルクを伝達するトーションバー12を備え、ハウジング3は、入力シャフト11を回転可能に支持するセンサケース20と、出力シャフト13を回転可能に支持するギアケース30と、センサケース20とギアケース30とを互いに傾倒可能に連結する連結手段5と、を備える構成とした。
(もっと読む)
モータ制御装置およびそれを用いた電動パワーステアリング装置
【課題】複数相のモータを制御するモータ制御装置において、対象とする相に開放状態の故障が発生した場合に、いずれの相に開放状態の故障が発生したか否かを、迅速かつ正確に検知するモータ制御装置およびそれを用いた電動パワーステアリング装置を得る。
【解決手段】電源電圧Vbが所定電圧Vthr以上、かつ、モータ回転速度ωが所定速度ωthr以下、かつ、対象とするx相電圧指令Vx*がゼロ付近でなく、かつ、対象とするx相の電流Ixが所定電流Iu_thr以下、かつ、制御誤差が所定誤差以上である状態が所定時間以上検出された場合に、対象とするx相に開放状態の故障が発生したと判定する。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
121 - 140 / 2,877
[ Back to top ]