
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
81 - 100 / 2,877
電動パワーステアリング装置
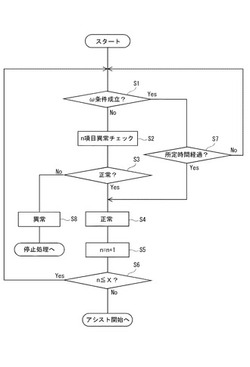
【課題】アシスト開始時間を短かくすることの可能な電動パワーステアリング装置を提供する。
【解決手段】EPSの備えるマイコンは、イグニッションスイッチがオンされた後、ECUがモータを通電制御する前に、モータまたはモータ駆動回路の故障診断処理を行う。ステアリングホイールとともに回転するモータの角速度が所定値よりも大きい場合(S1:YES)、処理は、故障診断の実施を省略する(S7:YES)。これにより、イグニッションスイッチがオンされてからモータの通電制御を開始するまでの時間が短縮される。
(もっと読む)
電動パワーステアリング装置

【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
車両操舵装置の制御装置
【課題】消費電力を低減することができる車両操舵装置の制御装置を提供する。
【解決手段】車両操舵装置1は、互いに異なる巻数の界磁部を用いてステアリングシャフト35にトルクを付与する電動モータ51と、ステアリングホイール12の操作にともないステアリングシャフト35に入力されるトルクである操舵トルクに応じて電動モータ51のトルクを制御する制御装置67とを備えている。制御装置67は、操舵トルクに応じて、電動モータの各界磁部の少なくとも一方に供給するモータ電流を制御する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
電動パワーステアリング装置
【課題】減速歯車機構を収容するギヤボックスが軽量で信頼性が高く且つ寸法安定性に優れる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、減速歯車機構を収容するハウジング部材33Aと、ハウジング部材33Aの開口部を覆うカバー部材33Bとが、ボルト33C及びナットにより締結され一体化されたギヤボックスを備えている。このハウジング部材33A及びカバー部材33Bは、ボルト33Cが挿通されるボルト穴37を有する金属製の芯金36A,36Bをインサートとした樹脂材料のインサート成形によって製造されたものである。
(もっと読む)
電動パワーステアリング装置
【課題】ヒステリシスを考慮して電動モータに供給する電流量を制御することで、操舵フィーリングの向上および安全性の向上を図ることができる技術を提供する。
【解決手段】ステアリングホイールの操舵トルクに応じた値を検出するトルク検出部210と、実際の操舵トルクとトルク検出部が検出する検出値との間のヒステリシスを考慮してトルク検出部210が検出した検出値を補正するトルク値補正部220と、トルク値補正部220が補正した検出値に基づいて電動モータ110に供給する目標電流を算出する目標電流算出部20と、を備え、トルク値補正部220は、トルク検出部210が検出した検出値に応じた補正量を用いて、操舵トルクが小さい場合にはヒステリシスを小さく、操舵トルクが大きい場合にはヒステリシスを大きくするように補正する。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
電動パワーステアリング装置のコントロールユニット
【課題】小型でありながら放熱能力があり、輻射ノイズも発生しない電動パワーステアリング装置のコントロールユニットを提供する。
【解決手段】パワー基板60及び制御基板70、トルクセンサアンプ基板80は鉛直方向に階層されケース20内に配置され、パワー基板60はケース20の底部近傍に配置され、ケース20内にアルミニウム製のGNDプレーン50を備え、GNDプレーン50はパワー基板60及び制御基板70、トルクセンサアンプ基板80の階層方向と同方向に側面部54を有し、パワー基板60及び制御基板70、トルクセンサアンプ基板80は側面部54に形成した接続部58a,58b,58cと電気的に接続している。また、ケース20の上部にカバー10を配置し、パワー基板60及び制御基板70、トルクセンサアンプ基板80は周囲をGNDプレーン50及びカバー10、ヒートシンク40で遮蔽している。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
動力伝達装置及び車両の操舵装置
【課題】組み立ての容易性と、組み立て後における駆動プーリの位置調整の容易性とを向上させることができる動力伝達装置及び車両の操舵装置を提供する。
【解決手段】動力伝達装置は、モータ11の駆動によって回転するモータ軸MZと、モータ軸MZに一体回転可能に支持される駆動プーリ40と、ラック軸12に動力伝達可能に設けられる従動プーリ41と、両プーリ40,41に掛装されるベルト42と、駆動プーリ40が内部に位置するようにモータ11が固定され、内外を連通させるための開口部30cが形成されたハウジング18と、モータ軸MZの先端を回転自在に支持する第1の軸受43と、モータ軸MZの回転軸線P1を中心とする径方向への変位が自在となるように第1の軸受43を支持し、且つ開口部30cを閉塞するようにハウジング18に固定される閉塞部材32と、を備えている。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】ウォームギヤ機構を有している電動パワーステアリング装置の操舵フィーリングを、より高めることができる技術の提供を課題とする。
【解決手段】ウォームギヤ機構44は、ウォーム軸46に設けられるウォーム70と、このウォーム70に噛み合うホイールとから成り、ウォーム軸46の一端部46aは、電動モータのモータ軸43aに対して端面同士が対面しつつ結合されるとともに、第1軸受47によってハウジング51に回転可能に支持され、ウォーム軸46の他端部46bは、第2軸受48によってハウジング51に回転可能に支持されている。また、第1軸受47と第2軸受48とのいずれか一方は、モータ軸43aの軸心WLに対してオフセットされている。第1軸受47及び第2軸受48は、両方共に、転がり軸受によって構成されるとともに、外輪の外周面全体がハウジング51によって支持されている。
(もっと読む)
電動パワーステアリング装置
【課題】制御基板上の発熱電子部品の放熱性を向上させる。
【解決手段】ステアリングシャフトに操舵補助力を付与する電動モータと、該電動モータの出力軸とは反対側に配置され電動モータを制御するコントロールユニットとにより構成され、該コントロールユニットは、電動モータに底部が結合された有底筒形状のECUハウジングと、該ECUハウジングの内部に収容され電動モータを駆動制御するためのMOSFET17を実装した金属基板16と、該MOSFET17を制御するためのマイコン24を実装したプリント基板16とを有し、金属基板16をECUハウジング内の底面の近傍に配置する一方、プリント基板16をECUハウジング内における金属基板16の開口部側に配置し、該プリント基板16の金属基板16と対向する面にマイコン24を実装し、該マイコン24と金属基板16とを熱伝達部材26を介して接続した。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
電動パワーステアリング制御装置
【課題】高次の車輪回転振動を抑制して操舵フィーリングを向上させる
【解決手段】電動パワーステアリングシステム1は、振動抑制補償量演算部22が、電動パワーステアリングシステム1における路面反力に対するモータ6の速度の特性について、基本アシスト量を振動抑制補償量で補正せずにモータ6を駆動させた場合の特性よりも、タイヤ10が1秒間で回転する回転数と一致する周波数(以下、基本車輪速周波数という)の1,2,3,4,5倍に一致する周波数で大きさが振動する路面反力に対してモータの速度が抑制された特性となる仕様を満たすように振動抑制補償量を演算する。これにより、上記仕様を満たすように、ハンドル2の操作を補助するためのアシスト操舵力を制御するため、基本車輪速周波数の2,3,4,5倍に一致する高次車輪速周波数を有する車輪回転振動がタイヤ10からハンドル2に伝達されるのを抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの電機子巻線の放熱性を高める。
【解決手段】ステアリングシャフトに操舵補助力を付与する電動モータ7と、該電動モータ7を制御するコントロールユニットとにより構成される。電動モータ7は、筒部を有するモータハウジングに収容される。コントロールユニットは、モータハウジングの軸方向の出力軸7cとは反対側に配置されたECUハウジングと、該ECUハウジングの内部に収容され電動モータ7を駆動制御するためのMOSFETを有する電力変換回路と、ECUハウジングの内部に収容されMOSFET等を制御する制御回路とを備える。MOSFETの出力端子14u,14v,14wと電動モータ7の入力端子16u,16v,16wとを電気接続する第2金属基板15を設け、該第2金属基板15を、モータハウジングの内面に当接させた。
(もっと読む)
81 - 100 / 2,877
[ Back to top ]