
Fターム[3D244AA01]の内容
Fターム[3D244AA01]の下位に属するFターム
Fターム[3D244AA01]に分類される特許
41 - 60 / 315
車両の制御装置
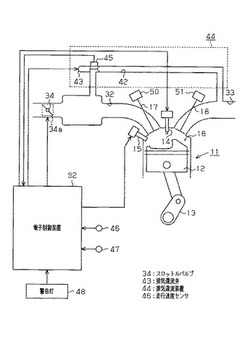
【課題】走行路面の傾斜に起因して生じる車両の走行速度の変動を打ち消す制振制御が実行される車両において、排気が還流されることにより内燃機関の燃焼状態が不安定になることを抑制することのできる車両の制御装置を提供する。
【解決手段】
排気還流装置44と車両の走行速度SPDを検出する走行速度センサ46とが備えられた車両において、走行路面の傾斜に起因して生じる車両の走行速度SPDの変動を打ち消すように走行速度センサ46の検出結果に基づいてスロットルバルブ34の開度であるスロットル開度θを制御する制振制御が実行されるときには、排気還流弁43を全閉状態とする。
(もっと読む)
車両走行速度制御方法

【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全対策およびエネルギー消費量・排出ガス量削減効果の一層の向上。
【解決手段】
車両は地点P通過時に、地点Pにおいて、地点P通過時刻、地点Pより交差点Aまでの
走行距離D、地点P−交差点間許容最高速度Vmax、地点P通過時刻、および交差点Aを
青信号・無停止で通過するための交差点Aへの到達設定時刻ta 、の各情報を得るとともに、
地点P通過後の経過時間Δt 、走行距離ΔDの計数を開始し、
その後地点P通過後一定時間Tc経過毎に推奨走行速度voptn(但し、n:0、1、2、
3、・・・、vopt0:地点P通過時の推奨走行速度)を算出して、前記voptn がその時点、の自車速vsnに対して、vsn >voptn であれば惰性走行、またvsn ≦voptn であればvoptn による推奨走行速度走行、で交差点に向けて走行し、交差点Aを青信号・無停止で通過する。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両クルーズコントロールを制御する方法であって、前記方法は、クルーズコントロールを作動状態にすると共に、車両設定目標速度(Vcc設定目標速度)を維持するように設定して、車両を運転するステップと、坂の上り坂を走行中に、車両の減速によって、車両設定目標速度より低い第1車速(Vmin)まで車速が低下し、しかも減速が0に減少した、又は車両設定目標速度まで車速を高めるために車両が加速し始めた第1車両位置(A)を登録するステップと、頂上から第1距離(y1、y2)を過ぎた地点での、頂上から下り坂の第2位置(C1、C2)における所望の車速(Vbcc超過速度)を登録するステップと、前記所望の車速に基づいて、第1距離(y1、y2)を走行中に最小限化又はゼロ燃料消費で、所望の車速に達することができるように、車両が頂上を通過しなければならない、頂上での車両最低速度(Vmin1、Vmin2、Vmin3)を計算するステップと、車両が、頂上を通過するとき車両最低速度(Vmin1、Vmin2、Vmin3)に達するように、第1車両位置(A)から頂上(B)までの第2距離(x)を走行中の車速を制御するステップとを含む。 (もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
走行制御装置
【課題】 渋滞時における加減速の抑制が図られた走行制御装置を提供する。
【解決手段】
本発明に係る走行制御装置1において、ECU2は、平均速度算出手段として、通信部4を介して自車の前方を走行している複数の前方走行車両の速度を取得し、それらの平均速度を求める。また、ECU2は、制御速度決定手段として、求めた平均速度に応じて、自車の制御速度を決定する。そのため、ECU2は、走行駆動部6や制動部7に対して所定の信号を送り、決定した制御速度での定速走行を自車におこなわせることができる。したがって、自車Nは直前の車両のみに追従するような加減速走行はせずに、複数の前方走行車両の平均速度に応じた制御速度で定速走行するため、加減速が抑制され、燃費の向上や渋滞解消の促進が図られる。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段を、無段変速装置7の変速操作位置を指示速度L1,L2,L3近くの速度に相当する試験走行用の変速操作位置thに設定して車体を走行させ、その試験走行用の変速操作位置thにおける走行速度の検出結果から、指示速度L1,L2,L3に対応する変速操作位置を推定して、指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3として設定するように構成した。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、比較的狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段103で、複数の指示速度のうち、最高速側の指示速度L3よりも低速側の指示速度L1,L2に相当する変速操作位置H1,H2は、車体を走行させての走行速度の検出結果から、選択された指示速度L1,L2に対応する基準の変速操作位置H1,H2として設定し、その他の指示速度L3に相当する変速操作位置H3を、所定の変化率に基づいた演算によって算出するように構成した。
(もっと読む)
アクセルペダル反力制御装置
【課題】電気的に制御されるアクチュエータによる消費電力を抑制することが可能なアクセルペダル反力制御装置を提供する。
【解決手段】アクセルペダル反力制御装置12は、電気的に制御されるアクチュエータ28によりアクセルペダル14に反力Frを付与する。アクセルペダル反力制御装置12は、車両10が定速走行しているとき、反力Frを減少させる。
(もっと読む)
走行制御装置
【課題】自動速度制御中に、進路前方に二股に分岐する分岐道路が存在しかついずれの方向に移動するかが不明である場合に、自動速度制御を解除することなく、分岐道路を適切な通過速度で通過させる走行制御装置を提供する。
【解決手段】自車周辺の地図情報に基づいて自車の車速を制御する走行制御装置であって、進路前方の分岐点Pで二股に分岐して曲率半径が互いに異なる2本の分岐道路112、113に連続する分岐前道路111を走行中でかつ分岐道路112、113のいずれに進入するか不明である場合に、曲率半径が小さい方の分岐道路の曲率半径に基づいて設定された目標通過速度に一致させるように、自車の車速を制御する。
(もっと読む)
車両の制御装置
【課題】オートクルーズ走行中におけるドライバビリティの悪化を防ぐことが可能な車両の制御装置を提供する。
【解決手段】上記の車両の制御装置は、第1変速モードと第2変速モードとの2つの間で変速モードを切り換え可能に構成されており、例えばECU(Electronic Control Unit)などの制御手段を備える。制御手段は、設定された車速を維持するように制御されたオートクルーズ走行中において、変速モードの切り換えを禁止する。このようにすることで、オートクルーズ走行中において、エンジン音や駆動力の変化を抑えることができ、運転者に対して違和感を与えるのを防ぐことができる。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
定速走行制御装置
【課題】アクセルペダル操作によって目標車速を変更できる定速走行制御装置において、様々な運転シーンにおいて違和感の少ない加減速度制御を行うことができるようにする。
【解決手段】アクセルペダルの操作量に応じて変更される目標車速Vo_tと現在の自車速Vo_pとを用いて算出される要求加速度Gx_tを、要求加速度変更手段55において、加速度上限値によって制限する。この加速度上限値は、現在の自車速Vo_pが現在車速閾値TH_pよりも高い場合、現在の自車速Vo_pがそれよりも低い場合より低く設定される。そのため、高速走行中における意図しない急加速を抑制することができる。また、アクセルペダルが大きく踏み込まれ高い目標車速Vo_tが設定されたときには、1よりも大きい第1ゲインが乗じられて加速度上限値が高い値に変更される結果、高い要求加速度Gx_tが設定されることになる。
(もっと読む)
走行支援装置
【課題】本発明は、移動体の適切な上限速度を設定する走行支援装置を提供することを課題とする。
【解決手段】移動体の移動速度の上限速度に基づいて走行支援を行う走行支援装置1であって、移動体の周辺に存在する物体を検出する周辺物体検出手段10,31と、周辺物体検出手段で検出した周辺物体が移動体の進路上の領域に存在する場合と当該進路上の領域の側方領域に存在する場合とで異なる上限速度を設定する上限速度設定手段32とを備えることを特徴とする。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
車両用走行制御装置
【課題】周囲環境に対する迷惑を抑制しつつ燃費を向上することができる車両用走行制御装置を提供する。
【解決手段】車両用走行制御装置1は、自車両10の周囲環境を検出するためのミリ波レーダ2,3と、ミリ波レーダ2,3で検出された周辺環境に応じて自車両10の走行を制御するECU4とを備えている。この車両用走行制御装置1では、ミリ波レーダ3で後続車両が検出されない場合には、速度範囲E内でエンジン11駆動による加速走行及びエンジン11停止による減速走行が繰り返されるような燃費走行で自車両10が走行され、燃費向上が実現される。一方、ミリ波レーダ3で後続車両が検出された場合には、加減速走行が行われない通常走行で自車両10が走行され、後続車両に対する迷惑が抑制される。
(もっと読む)
車両走行制御装置
【課題】ドライバがアクセルペダルを踏んだままの状態で、自動で追従制御を開始し、ドライバがアクセルペダルを踏み込むと追従制御が解除される車両走行制御装置。
【解決手段】アクセルペダルの操作の変化量が、所定の範囲内に所定の時間以上、留まる場合、通常制御から追従制御へ切替え、先行車との車間距離を所定の距離に保つ自動制御を開始し、アクセルペダルの操作の変化量が、所定値以上増加した場合には、追従制御から通常制御へ復帰する、アクセル操作反力演算部からの指令値に応じて操作反力を前記アクセルペダルに発生させる、また、追従制御から通常制御に切り替わった時に、前記追従制御部のトルク指令値から前記通常制御部のトルク指令値へ所定の傾きをもって切替えること。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】加速を許容すべきか否かを的確に判断し、適宜、車速制限を解除する。
【解決手段】自車両の斜め後方に後方車両を検出したら(ステップS4の判定が“Yes”)、自車両に対する後方車両の接近度合を判断する。このとき、後方車両が自車両の近距離に位置する(ステップS5の判定が“Yes”)、又は自車両に急接近していれば(ステップS6の判定が“Yes”)、自車両の運転者に車線変更の意志があるか否かを判断する。そして、自車両の運転者が、後方車両が接近してくる側へ車線変更しようとしているのであれば(ステップS8の判定が“Yes”)、車速制限を解除し(ステップS3)、加速を許容する。車速制限を解除するときには、ディスプレイ11及びブザー12を駆動することにより、車速制限を解除する旨を、表示や音声によって運転者に報知する。
(もっと読む)
車両用運転支援装置および車両用運転支援方法
【課題】オートクルーズ制御がオンの状態で、ブレーキ操作を行わなくてもカーブ路を走行できるか否かの情報をユーザに提供する。
【解決手段】道路情報を取得し、取得した道路情報、および、定速走行制御時の一定速度に基づいて、定速走行制御中に一定速度でカーブ路を走行する際に必要となる必要旋回ヨーモーメントを算出するとともに、定速走行制御中に一定速度でカーブ路を走行する際に、車両が走行可能な限界ヨーモーメントを算出する。そして、車両がカーブ路に進入する前に、必要旋回ヨーモーメント65および限界ヨーモーメント64を、表示装置に表示させる。
(もっと読む)
車間距離制御装置
【課題】運転者による加減速操作に応じて目標車間距離を変更した場合にドライバビリティの悪化を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、自車と先行車との車間距離を取得する車間距離取得手段と、運転者の加速操作又は減速操作に応じて車間距離に基づいて目標車間距離を変更する目標車間距離変更手段と、自車と先行車との相対速度を取得する相対速度取得手段とを備え、目標車間距離変更手段は、加速操作終了が検出された後又は減速操作終了が検出された後に、自車と先行車との相対速度が零になったときの車間距離に基づいて目標車間距離を変更することを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】クルーズコントロールにおける燃費向上を図る。
【解決手段】目標車速と実車速との車速偏差に基づいて目標スロットル開度を算出する目標スロットル開度算出部38と、目標スロットル開度に基づいてスロットル開度制御を行うスロットル開度制御部34と、目標車速に対する実車速の低下許容値である車速偏差閾値を設定する車速低下許容値設定部36と、実車速に基づいてスロットル上限開度を算出するスロットル上限開度算出部37と、を備え、目標スロットル開度算出部38は、目標車速と実車速の車速偏差が車速偏差閾値以内の場合にはスロットル上限開度以下に目標スロットル開度を制限し、実車速が目標車速よりも車速偏差閾値以上低下した場合には、より大きなスロットル上限開度に切り替えて目標スロットル開度の制限を行う。
(もっと読む)
41 - 60 / 315
[ Back to top ]