
Fターム[3D244AA01]の内容
Fターム[3D244AA01]の下位に属するFターム
Fターム[3D244AA01]に分類される特許
21 - 40 / 315
車両用速度制御装置
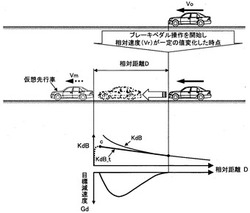
【課題】先行車両が存在しない状況においても、ドライバにとって違和感のない速度制御を行うことができる車両用速度制御装置を提供する。
【解決手段】ブレーキペダル操作を開始し、相対速度が一定の値変化した時点で、自車両よりも初期距離だけ前を目標速度で相当する仮想先行車を設定する。そして、初期距離、目標速度から、接近離間状態評価指標の初期値を算出する。さらに、速度制御開始条件成立後の相対距離を、その条件が成立してからの経過時間と、相対速度の現在値と、初期距離とから逐次算出する。そして、これら初期距離、接近離間状態評価指標の初期値、相対距離から目標相対速度を逐次算出する。そして、目標相対速度と現在の実際の相対速度との差に基づいて速度制御を行う。よって、先行車両が存在していなくても、接近離間状態評価指標KdBを用いた、ドライバにとって違和感のない速度制御を行うことができる。
(もっと読む)
走行制御装置

【課題】 簡単な機構により容易にオートクルーズ走行制御が可能となる。
【解決手段】 走行車体に設けられた変速ペダルと、変速ペダルの踏み込み量を検出するペダルセンサ30と、走行車体のエンジンの動力を変速して出力する油圧式無段変速機32と、ペダルセンサからの出力に基づいて、油圧式無段変速機32を制御する制御部31と、オートクルーズモードを指示するオートクルーズスイッチ42と、を備え、制御部31は、オートクルーズスイッチ42から指示が出された場合、その指示がなされた際の、変速ペダルの最大踏み込み量時の走行車体速度MAX1,2で、車体速度が一定に維持されるように、油圧式無段変速機32を制御する、走行制御装置。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
車群走行制御装置
【課題】車群内の一部の車両が車群を離脱する場合にも、車群を維持することができる車群走行制御装置を提供する。
【解決手段】
車群内順序決定部106により、各車両は、車群内の自車両の順序である車群内順序を決定し、走行計画とともに、車両IDおよび車群内順序を送信機から同報送信する。追従車両は、複数の先頭車両走行計画を取得した場合、先頭車両走行計画とともに送信されてくる車両IDと車群内順序に基づいて、それら複数の先頭車両走行計画を送信した各先頭車両の車群内順序を決定し、且つ、その決定した各先頭車両の車群内順序と自車両の車群内順序とに基づいて、自車両の走行計画を決定するために用いる先頭車両走行計画を選択する(先頭車両選択部108)。これにより、自車両が追従すべき先頭車両走行計画を誤らずに用いて追従車両走行計画を決定することができるので、車群内の一部の車両が車群を離脱する場合にも車群が維持される。
(もっと読む)
車間距離制御装置
【課題】先行車両と自車両との車間距離が基準車間距離を超えている場合において、燃料消費率の改善を図る。
【解決手段】ECU4は、車速センサ3が検出する車両1の速度に応じた基準車間距離を算出し、レーダセンサ2が検出する先行車両と車両1との検出車間距離と比較する。検出車間距離が基準車間距離以下の場合は基準車間距離を目標車間距離として車間距離制御を行い、検出車間距離が基準車間距離を超えている場合は基準車間距離を延長した延長車間距離を目標車間距離として車間距離制御を行う。
(もっと読む)
速度制御装置
【課題】速度差が小さい車両同士の無理な追い越し行動を抑制することができる速度制御装置を提供することを目的とする。
【解決手段】速度制御装置1は、自車100と自車100の直前を走行する直前車との速度差を測定する相対速度測定部13と、自車100の速度を調整する制御ECU10と、を備え、制御ECU10は、相対速度測定部13により測定された速度差が所定値よりも小さい場合には、自車100の速度を直前車の速度に合わせるように調整し、上記速度差が所定値以上であり、かつ、自車100による直前車の追い越しが完了するまでに自車の後方を走行する後方車が自車100に追い付くと予測される場合には、自車100の速度を直前車の速度に合わせるように調整する。
(もっと読む)
車両制御システム
【課題】設定された車速を目標車速として車速を自動制御する場合の燃費を向上可能な車両制御システムを提供する。
【解決手段】車両の動力源と駆動輪との間で動力を伝達する流体伝達機構と、流体伝達機構と並列に設けられ、流体伝達機構を介さずに動力源と駆動輪とを機械的に接続する係合状態と、機械的に接続しない開放状態とに切替え可能で、かつ開放状態で車両の車速が第一車速以上となった場合に係合状態に切り替わるロックアップ装置とを備え、運転者により設定された第二車速を目標車速として車速を自動制御する所定走行制御(S1肯定)において、第二車速が第一車速よりも低い車速であり(S2肯定)、かつロックアップ装置が開放状態である(S3肯定)場合、車速を第一車速以上の車速まで上昇させる加速制御を実行し(S4)、加速制御によりロックアップ装置が係合状態に切替わった後に第二車速を目標車速として車速を制御する。
(もっと読む)
無段変速機の変速制御装置
【課題】クルーズ制御中の過渡時における無段変速機の変速ハンチングを抑制する。
【解決手段】クルコン要求馬力演算部33はクルーズ目標車速Soと実車速Sとの速度差ΔSからクルコン要求馬力HPsを求め、クルコン要求トルク演算部34はクルコン要求馬力HPsとエンジン回転数Neとに基づいてクルコン要求トルクTcsを求める。クルコン用アクセル開度演算部37はクルコン要求トルクTcsとエンジン回転数Neとに基づきクルコン用アクセル開度θhaの特性曲線が等馬力曲線に沿って設定されているエンジントルクマップを参照して、クルコン用アクセル開度θhaを設定する。目標プライマリ回転数演算部25はクルコン用アクセル開度θhaと実車速Sとに基づき変速線マップを参照して目標プライマリ回転数Npoを設定する。変速制御部26は目標プライマリ回転数Npoと実車速Sとに基づき目標変速比を求めて変速制御を行う。
(もっと読む)
車群走行制御装置
【課題】通信エラーが生じている期間も追従車が先導車に追従する走行制御を行うことができる車群走行制御装置を提供する。
【解決手段】先導車は、先導車走行計画決定部104で、今後の自車両の走行制御値を示す先導車走行計画を決定し、走行計画送信処理部106では、その先導車走行計画を無線機30から送信する。これにより、先導車は、今後の自車両の走行制御値を事前に送信することになる。追従車はこの先導車走行計画を受信する。追従車は、通信エラーにより先導車走行計画が一時的に受信できない場合が生じても、その通信エラーが生じた時点において先導車が行う走行制御値を事前に受信している。そのため、通信エラーが生じている期間も追従車は先導車に追従する走行制御を行うことができる。
(もっと読む)
ハイブリッド車両用駆動装置の制御装置
【課題】車重変化、走行抵抗、登降坂を加味して走行を制御することができドライバビリティのよいハイブリッド車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド車両用駆動装置の制御装置であって、被駆動部に伝達される駆動力と車速から導出される平坦路における走行抵抗とに基づいて算出した理論加速度と、単位時間の車速の変化から算出した実加速度との乖離量から登降坂レベルを算出する登降坂レベル算出部と、被駆動部に伝達される駆動力と、車速から導出される平坦路における走行抵抗と、登降坂レベルとに基づいて算出した期待加速度を積分して目標車速を算出する目標車速算出部と、目標車速と実際の車速との差異を電動機で補正するように電動機を制御するフィードバックコントローラと、を備える。
(もっと読む)
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両の設定目標速度(Vcc設定目標速度)を維持するように設計されたコントロールユニットを含む車両クルーズコントロール制御方法及びシステムであって、前記コントロールユニットは、車両の総重量である第1パラメータ、現在の道路勾配である第2パラメータを登録し、該登録された第1パラメータ及び第2パラメータに基づいて、前記クルーズコントロールにおけるブレーキクルーズコントロールについての設定車両超過速度(Vbcc)を新しい値(Vbcc flex)に調節するようにプログラムされている。これにより前記クルーズコントロール及びブレーキ装置において、遅延による設定車両超過速度(Vbcc)を超える車両速度に起因する車両速度の増加が回避される。 (もっと読む)
交通制御システム、車両走行制御装置及び交通制御方法
【課題】前方車両の減速を予測する必要なく、減速伝播を抑え、渋滞を緩和させることが可能な交通制御システム、車両走行制御装置及び交通制御方法を提供する。
【解決手段】車両制御ECU16は、前方の通信車101と後方通信車102との通信車車間時間Tcを算出し、通信車車間時間Tcが所定値以下である減速伝播の増幅の恐れがある後方の通信車102については、無線通信により取得した前方の通信車101の減速開始時期と後方の通信車102の減速開始時期とを合わせるように後方の通信車102の走行を制御する。前方の通信車101の減速を通信により遅れなく把握することで、前方の通信車101と同時に後方の通信車102が減速を開始できる。そのため、減速伝播の増幅を後方の通信車102のところで分断でき、前方車両の減速を予測する必要なく、減速伝播を抑え、渋滞を緩和させることが可能となる。
(もっと読む)
運転解析システムおよび運転記録装置
【課題】運転者に対する安全運転教育のための運転記録を提供する運転記録装置および当該運転記録に基づいて運転状態の解析を行う運転解析システムを提供する。
【解決手段】ステレオカメラ1で撮影された画像データを記録する画像記録部2と、画像データから3次元画像情報を算出する3次元画像情報算出部3と、3次元画像情報に基づいて、画像中の動体対応画像部分を特定する動体特定部4と、3次元画像情報に基づいて自車両の速度を検出する速度算出部5と、動体との車間距離を検出する車間距離検出部6と、車間距離および速度算出部5で検出された自車両の速度等の運転情報を記録する記録部7を備えている。
(もっと読む)
補助動力装置付き二輪車
【課題】加速度センサを用いることなく適切な駆動力によるクルーズ走行を可能とする補助動力装置付き二輪車を提供する。
【解決手段】制御部46は、検知されたペダル踏力のピーク値に対応する目標車速MTが保持または漸減されるように駆動モータ24を駆動するクルーズ走行を実行すると共に、車速センサ37により検知される現在車速Vと目標車速MTとの対応関係に基づいて路面の勾配状態を判定し、該勾配状態に応じてクルーズ走行中に目標車速MTの更新を行う。目標車速の更新は、クルーズ走行中に、先に設定された目標車速MT1に対して現在車速Vが所定値以上減少すると、現在車速Vを新たな目標車速MT2,3とすることで実行される。一方、クルーズ走行中に、先に設定された目標車速MT3に対して現在車速Vが所定値以上増加すると、現在車速Vより所定割合だけ小さい車速を新たな目標車速MT4,5とする。
(もっと読む)
車両追従制御装置
【課題】 目標車速の手動設定を省略できる車両追従制御装置を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、アクセル開度センサ110によりアクセルOFFが検出された場合、自車両と先行車との相対関係を維持する追従制御に介入する速度制御部102aを有するブレーキECU102と、を備え、ブレーキECU102は、速度制御部102aによる追従制御介入時の自車両の速度に基づいて、追従制御時の上限車速を設定する上限車速設定部102bを備えた。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
油圧無段変速機付き自走式車両
【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
走行支援装置
【課題】本発明は、無駄な加減速を抑制する目標速度を設定することができる走行支援装置を提供することを課題とする。
【解決手段】自車両の目標速度を設定する走行支援装置1であって、自車両周辺の他車両の速度を取得する他車両速度取得手段11,21と、他車両速度取得手段11,21で取得した他車両の速度に基づいて目標速度を算出する目標速度算出手段51を備え、目標速度算出手段51は、他車両速度取得手段11,21で自車両前方の複数の他車両の速度を取得できた場合、当該複数の他車両の中で速度の低い他車両ほど目標速度算出に寄与する重みを大きくすることを特徴とする。
(もっと読む)
21 - 40 / 315
[ Back to top ]