
Fターム[3D244AA14]の内容
Fターム[3D244AA14]に分類される特許
1 - 20 / 62
トラクタの操作装置
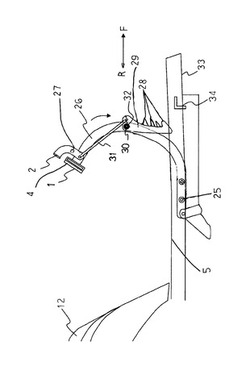
【課題】 トラクタ作業操作は、作業機を装着して特殊な作業操作を行うことが多く、トラクタ車体としての本来の走行操作は、できるだけペダル操作として、手動操作で作業機等の作業操作を行わせるのが、作業性や、作業能率、乃至安全性の向上において好ましい。
【解決手段】 HSTペダル1を前進位置Fへ踏込んだ状態で、オートクルーズ入りの操作と、オートクルーズを解除する操作を行うオートクルーズペダル2を設ける。また、前記オールトクルーズペダル2を、HSTペダル1の前周近傍部3で、このHSTペダル1のペダル面4よりも上位位置に配置して、前記HSTペダル1踏込の同足先で踏込操作してオートクルーズを入り切り可能に設ける。
(もっと読む)
運転支援装置

【課題】燃費を向上させるための車両の運転支援装置を提供する。
【解決手段】自車両のアクセル開度を検出する手段と、アクセル開度の時系列データに基づいて、該アクセル開度の自己相関関数を算出する手段136と、自己相関関数の値に基づき、自車両のアクセル操作の周波数を算出する手段137と、自車両の加速度を検出する手段と、加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段131と、パワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133と、を備える、燃費を向上させるよう車両の運転を支援するための装置である。この装置は、アクセル操作の周波数が所定値よりも低く、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
クルーズコントロールシステム
【課題】先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用する。
【解決手段】ACC制御中で自車両が停止した場合(S2)、自車両の停止保持状態をブレーキ圧やEPBの作動によって確認し(S3)、さらに、アイドルストップ実行条件が成立するか否かを調べる(S4)。そして、アイドルストップ実行条件が成立する場合、ACC制御ユニットからアイドルストップ制御ユニットにエンジン停止指令を出力し、エンジンのアイドル運転を停止させ、エンジンを自動停止させる(S5)。これにより、先行車両の停止による自車両の停止時に適切にアイドルストップを実行可能とし、アイドルストップによる燃費低減や排気エミッションの低減を有効に活用することができる。
(もっと読む)
車両用運転支援装置
【課題】道路上の制限速度が変化した場合のセット車速の変更を、ドライバの意思を尊重しつつ容易に行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4でセット車速Vsetと異なる制限速度Vlimを検出したとき、セット車速Vsetの値を制限速度Vlimに切換可能なスタンバイモードを一時的に実行し、スタンバイモードの実行中はセット車速Vsetと制限速度Vlimとを対比可能に表示するとともに、ドライバの操作状態に応じてセット車速Vsetの維持或いは制限速度Vlimへの切換を選択的に行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に一時加速してから、再びクルーズ走行に復帰する際の違和感を抑制する。
【解決手段】クルーズ要求トルクTcがアクセル要求トルクTaよりも大きい状態から(S14の判定が“No”)、アクセル要求トルクTaがクルーズ要求トルクTcよりも大きくなり、一時加速した場合には(14Sの判定が“Yes”)、禁止フラグをFNG=1にセットし(S25)、許可フラグはFOK=0にリセットする(S26)。その後、運転者のアクセル操作が解除されても(S35の判定が“Yes”)、自車速がクルーズ要求トルクTcに従ったクルーズ要求車速に戻るまでは(S29の判定が“No”)、禁止フラグがFNG=1、及び許可フラグがFOK=0の状態を保持し、一時加速後のエンジンの停止を禁止する(S37)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クルーズ走行中に設定車速が低下し、その設定車速が達成されるときの違和感を抑制する。
【解決手段】HEVモードを維持している状態で、運転者がステアリングスイッチ28を操作し、コースト操作を行ったら(S13の判定が“Yes”)、コーストフラグをFc=1にセットし(S18)、禁止フラグをFNG=1にセットする(S19)。設定車速Vsを達成するまでは、クルーズ要求トルクTcは負値へと転じ、停止判定閾値TOFFよりも小さくなり、エンジン停止要求となるが(S30の判定が“No”)、禁止フラグがFNG=1にセットされていることで(S25の判定が“No”)、エンジン1はON状態を維持する(S28)。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
ハイブリッド車両の制御装置、ハイブリッド車両の制御方法
【課題】クルーズ走行中に設定車速が増加し、その設定車速を達成するまでの違和感を抑制する。
【解決手段】モータ2のみを駆動し、EVモードでクルーズ走行している状態で、運転者のスイッチ操作によって設定車速Vsが増加したら(S11、S13、S16の全てが“Yes”)、禁止フラグをFNG=1にセットしてエンジン1の始動を禁止する(S29)。このとき、モータトルク上限値TLを増加補正する(S24、S25)。車速Vが設定車速Vsまで増加し(S28の判定が“No”)、且つクルーズ要求トルクTcが始動判定閾値TONより小さければ(S36の判定が“No”)、加速期間が終了したと判断して、モータトルク上限値TLを増加補正前の通常値に復帰させる(S31)。
(もっと読む)
自動車の自動変速機の制御方法
【課題】道路勾配に応じて簡単な操作で運転プログラムが割当てられる、クルーズコントロールを備えた自動車の制御方法を提供する。
【解決手段】クルーズコントロールを備えた自動車の自動変速機の制御方法は、変速機制御がクルーズコントロールのもとで外的影響、特に道路勾配に関連する別個の運転プログラムに切換えるものである。この運転プログラムは外的影響に応じて更新される。状態「設定」で別個の運転プログラムに切換えられ、状態「復帰」で運転プログラムが直ちに又は制御状態「設定」に到達した後に初めて作動されるように、変速機制御を調整することができる。
(もっと読む)
他車認識システム
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
車両制御装置
【課題】駆動源としてエンジンとモータを用いる車両において、先行車に追従走行している時に先行車が加速した場合の燃費を抑制することができる車両制御装置を提供する。
【解決手段】駆動源としてエンジンとモータを用いる車両において、先行車までの距離を検出する車間距離検出手段と、前記先行車との相対速度を検出する相対速度検出手段と、前記相対速度検出手段によって検出された相対速度を微分し、相対加速度を算出する相対加速度算出手段と、自車速度を検出する自車速検出手段と、前記車間距離検出手段と前記相対速度検出手段と前記相対加速度検出手段と前記自車速検出手段によって検知された車間距離、相対速度、相対加速度、自車速度にもとづいて、先行車に追従するために必要な前記モータの出力トルクを算出する出力トルク算出手段と、前記出力トルク算出手段で算出されたトルクを出力するように前記モータを制御する制御手段とを備えた構成とする。
(もっと読む)
追従走行制御装置
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
車両用走行制御装置
【課題】コーナーの出口などで追従走行制御の開始操作が行われたときに、迅速に制御対象を決定する。
【解決手段】自車両前方の物体を検出するレーダ装置15と、自車両の推定走行軌跡を中心として設定される所定の幅を有する制御対象決定領域およびレーダ装置15の出力に基づいて制御対象を決定する制御対象決定部34と、制御対象と自車両との相対距離に基づいて追従走行制御を行う走行制御部37と、運転者により操作され追従走行制御を開始する制御開始スイッチ16と、を備え、制御対象決定部34は、追従走行制御が実行されておらず且つ自車両の走行路が直線でなく、制御開始スイッチ16により追従走行制御の開始操作が行われた場合に、レーダ装置15により自車両の正面に検出された物体を制御対象に決定する。
(もっと読む)
車両走行制御装置
【課題】ドライバがアクセルペダルを踏んだままの状態で、自動で追従制御を開始し、ドライバがアクセルペダルを踏み込むと追従制御が解除される車両走行制御装置。
【解決手段】アクセルペダルの操作の変化量が、所定の範囲内に所定の時間以上、留まる場合、通常制御から追従制御へ切替え、先行車との車間距離を所定の距離に保つ自動制御を開始し、アクセルペダルの操作の変化量が、所定値以上増加した場合には、追従制御から通常制御へ復帰する、アクセル操作反力演算部からの指令値に応じて操作反力を前記アクセルペダルに発生させる、また、追従制御から通常制御に切り替わった時に、前記追従制御部のトルク指令値から前記通常制御部のトルク指令値へ所定の傾きをもって切替えること。
(もっと読む)
車両用オートクルーズ装置
【課題】セットスイッチのみを1回操作するだけでオートクルーズ走行を開始することができ、かつ誤操作を防止できる車両用オートクルーズ装置を提供する。
【解決手段】車両に搭載されたオートクルーズ制御コンピュータ25は、この車両がオートクルーズに適した速度で走行し、車速変動とアクセル操作の変動が所定値以内であり、車間距離が適正値以上に保たれ、ブレーキが作動しない、という条件が全て満たされた状態が所定時間以上続いたときに、オートクルーズ受付許可状態となり、インジケータランプ21を点灯させる。オートクルーズ受付許可状態において、セット/レジュームスイッチ30を第1の方向R1に操作すると、オートクルーズ走行が開始する。オートクルーズ受付許可状態において、車速が低下するなどしてオートクルーズ受付許可状態を解除する条件が成立すると、オートクルーズ受付許可状態が解除されるとともに、インジケータランプが消灯する。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車速制限制御装置
【課題】制限車速の変化速度決定処理が走行抵抗による影響を受けることなく、制限車速変更操作に対する再現性が確保され得るようにした車速制限制御装置を提案する。
【解決手段】t1から「SET」スイッチの短時間操作を6回繰り返したことにより、制限車速指令値tLmtVSPが変更前制限車速指令値tLmtVSP (0)からPitch=「1Km/h」の小ピッチずつ6回上昇された場合の制限車速LmtVSPの変更速度を以下のように決定する。現在の制限車速指令値tLmtVSPおよび変更前制限車速指令値tLmtVSP(0)間の制限車速指令値段差ΔtLmtVSPが設定値ΔtLmtVSP(2)に到達するt2までは、制限車速LmtVSPの時間変化割合を小さなγにし、t2以降は、ΔtLmtVSP≧ΔtLmtVSP(2)であるから、LmtVSPの時間変化割合を大きなβにし、制限車速LmtVSPを実線図示のごとき速度(γ,β)制御下で変更後制限車速指令値tLmtVSP に至らしめる。
(もっと読む)
1 - 20 / 62
[ Back to top ]