
Fターム[3D244AA25]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 追突防止、車間距離保持 (389)
Fターム[3D244AA25]に分類される特許
141 - 160 / 389
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速Vを検出する車速検出手段2aと、自車両と先行車両との車間距離Lを検出する車間距離検出手段2bと、車速Vを設定車速VSに制御する及び車間距離Lを車速Vで除して算出された車間時間Tを設定車間時間TSに制御する車両制御手段2cと、自車両の後側方の他車両を検出する後側方検出手段2dと、車間距離Lが車線変更を行うために必要な所定車間距離LC以下となった場合で、後側方検出手段2dが自車両の後側方の他車両を検出しない場合に、車線変更時期を報知する報知手段2eを備えることを特徴とする。
(もっと読む)
汚れ判定装置

【課題】レーダセンサのレーダ波受信面の汚れを精度良く判定する汚れ判定装置を提供する。
【解決手段】監視対象周波数領域から抽出した監視対象ピークの電力値を、変調区間毎かつ受信チャンネル毎に算出し、変調区間毎に、電力値が最大となる最大チャンネルに対する各受信チャンネルの電力値の偏差(チャンネル偏差)を算出する(S210〜S250)。算出したチャンネル偏差に従って、各受信チャンネルに対応付けられた前判定値CPをカウントすると共に、車速Vが下限車速Vth以上、かつ受信チャンネルの中に前判定値CPが前判定閾値CPth以上のものが存在する場合に、車速Vに応じて算出される更新値Kにより汚れ判定値CDを更新し、その汚れ判定値CDが汚れ判定閾値CDth以上であれば、レーダ波の受信面に汚れが生じていることを表すダイアグ情報をONにする(S260〜S320)。
(もっと読む)
追従走行制御装置
【課題】追従走行の発進時に、制御のもたつきや先行車の挙動に起因にした変動のない、スムーズで滑らかな発進を実現する。
【解決手段】判断部22により先行車の発進と判断すると、検出部21の検出に基づき、先行車に対する自車1の追従状況に応じて時々刻々変化するFF制御の目標値を設定部23が設定する。そして、FF制御部24の走行制御により、設定された目標値に基づき、先行車の時々刻々の発進状況に応じたFF制御で自車がもたつきや変動のない、スムーズで滑らかな発進を実現する。
(もっと読む)
追従走行制御装置
【課題】ドライバに負担をかけることなくドライバの意思に沿ったアダプティブクルーズコントロール(ACC)の追従走行が行えるようにする。
【解決手段】セットスイッチ7を操作してACCの追従走行を開始することにより、車速センサ4が検出した自車1の車速と、カメラ6、制御処理部2により取得された走行中の道路の制限速度とに基づき、制御処理部2により、追従走行制御の上限車速をその道路の制限速度又は現在の自車1の車速に設定し、ドライバが走行中の道路の制限速度内で追従走行することを望んでいるときには、走行中の道路の制限速度内で先行車に追従走行するように自車1の走行を制御し、ドライバが走行中の道路の制限速度を超える現在の車速で追従走行することを望んでいるときには、走行中の道路の制限速度を超えた現在の速度で先行車に追従走行するように制御する。
(もっと読む)
車両走行制御装置
【課題】 停止保持状態にある自車両が発進する際に、ドライバに与えるショック感を低減することができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、カメラ2から送信される画像信号に基づいて先行車両におけるブレーキランプの点灯状態を判断する。自車両が停止しているときに、先行車両のブレーキランプが消灯した場合に、自車両の駆動レンジをニュートラルレンジからドライブレンジに移行させる。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両の車速を検出する車速検出手段3aと、自車両と先行車両との車間距離及び先行車両の有無を検出する車間距離検出手段3bと、車速を設定車速に制御する及び車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段3dと、前方情報を取得する前方情報取得手段5aと、前方情報に基づいて自車両を車線内に維持するように操舵装置の転舵力を制御する操舵制御手段5bと、運転者の先行車両に対する追従意思を推定する推定手段3cを備え、車両制御手段3dによる制御と操舵制御手段5bによる制御が同時に行われており、かつ、推定手段3cが追従意思を推定しない場合に、車両制御手段3dが車速を転舵力が制限値となる制限車速以下Vrとする制限車速制御を行うことを特徴とする。
(もっと読む)
車両用走行制御装置
【課題】よりドライバの感覚に合った走行制御を行う車両用走行制御装置を提供することを目的とする。
【解決手段】先行車との車間距離を目標距離に保つ車間制御モードと、前記先行車を確認できない場合に車速を設定車速に保つ定速制御モードとが切り替え可能で、前記車間制御モードから前記定速制御モードへの移行時であっても自車の走行環境が所定の走行環境である場合には当該移行に伴う加速を抑制する加速抑制制御を行う車両用走行制御装置であって、前記加速抑制制御を実行中にドライバによりアクセルペダルが踏下されたか否かの情報を取得するドライバ情報取得手段と、前記ドライバ情報取得手段により前記アクセルペダルが踏下された旨の情報を取得すると、前記加速抑制制御を解除して前記アクセルペダルの踏下に応じた加速を行う制御を行う車速制御手段とを有することを特徴とする。
(もっと読む)
シフトダウン制御装置
【課題】補助ブレーキ作動中のシフトダウン時における減速度の抜けを解消するシフトダウン制御装置を提案する。
【解決手段】オートクルーズコントロール中に補助ブレーキを作動させた後(S3)、シフトダウン条件が成立したときに(S7−S8)、機械式自動変速機がシフトダウン動作を開始して終了するまでの変速時間中に、主ブレーキを作動させ(A)、減速度の抜けを補填する。すなわち、クラッチが切れて補助ブレーキが利かなくなる間を、主ブレーキの制動力にて補填する。
(もっと読む)
オートクルーズ装置
【課題】 先行車との車間距離を保持しながら走行可能なオートクルーズ装置に関し、常に適切なタイミングで補助ブレーキを作動させることを目的とする。
【解決手段】 先行車に対する目標車間距離doを算出する目標車間距離算出手段26と、先行車との実際の車間距離dを求める実車間距離検出手段18と、目標車間距離doと実車間距離dとの偏差Δdを求める車間距離偏差算出手段28と、目標車間距離doと該車間距離偏差Δdとの比としての車間距離偏差率drを求める車間距離偏差率算出手段30と、少なくとも該車間距離偏差率drに基づいて該車両の制動装置を制御する制動装置制御手段22とを有するように構成する。
(もっと読む)
車両の走行制御装置
【課題】先行車の右左折を認識した際の目標車間距離を適正に設定し、運転者の要求に沿った走行制御を実現することができるようにする。
【解決手段】自車両1に搭載された、ステレオカメラ3aを備える前方認識装置3で認識した先行車情報に基づいて、少なくとも追従目標車間距離L1を設定し(S6)、次いで先行車1’の右左折を判定し(S7)、先行車1’の右左折を検出した場合、追従目標車間距離L1に補正係数KG(例えばKG=0.5)を乗算して、右左折時の追従目標車間距離L1を設定する(S8)。
(もっと読む)
車両の走行制御装置。
【課題】先行車との関係に応じ、ドライバのフィーリングに合った適切な減速度で減速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、車間距離dが最終目標距離dlim以下となったときのブレーキ制御用の目標減速度Gbを、最終目標距離dlimに対して車間距離dが占める割合Dr(=(d/dlim)×100)に応じて可変設定する。これにより、先行車に対するプリクラッシュ制御を前提としたブレーキの自動介入制御時においても、過剰な減速度による減速を防止する。すなわち、割合Drに基づいて目標減速度Gbを設定することで、最終目標距離dlimに対して自車1が同じ距離だけ割り込んだ場合でも、最終目標距離dlimが小さい場合には大きな減速度での的確なプリクラッシュ制御を確保しつつ、最終目標距離dlimが大きい場合には相対的に小さな減速度でプリクラッシュ制御を行う。
(もっと読む)
車両走行速度制御装置および方法
【課題】車両の操舵角、ヨーレート、および車両の前方道路の情報を予め検出し、曲線路の進入または進出の際に車両の速度を制御して車両の安全性と乗車感を向上させることが可能な、車両走行速度制御装置およびその方法の提供。
【解決手段】車両の前方道路を撮影して映像データを取得し、前記映像データからカルマンフィルターを用いて前方道路情報を抽出する前方映像センサーと、前記前方道路情報を用いて車両の走行に必要な速度を計算する制御部と、前記計算された車両の速度に応じて車両の走行動作を調節する駆動部とを含んでなる、車両走行速度制御装置。
(もっと読む)
走行制御装置
【課題】自車両の走行状態を先行車両の走行状態に追従させながらも、交通の流れを妨げる先行車両を自車両が円滑に追い越せるようにする走行制御装置を提供すること。
【解決手段】先行車両を追従対象として設定しながら自車両の走行状態をその先行車両の走行状態に追従させる走行制御装置100は、その先行車両が交通流を阻害する交通流阻害車両であるか否かを判定する交通流阻害車両当否判定手段11と、その先行車両が交通流阻害車両であると判定された場合に、その先行車両を追従対象から外す条件を緩和する解除条件緩和手段12と、を備える。
(もっと読む)
車両制御装置、車両制御方法及びコンピュータプログラム
【課題】制動制御の開始タイミングを早くすることによって障害物との接触の際の衝撃を小さくすることを可能とした車両制御装置、車両制御方法及びコンピュータプログラムを提供する。
【解決手段】自車両と前方車両とが衝突する虞があると判定された状況下で衝突防止制御を行う際に、自車情報、前方車両情報及び周辺道路状況を考慮することにより、ステアリング操作によって前方車両との衝突が回避できるか否かを判定し(S21〜S25)、回避できると判定された場合にはAT5をシフトホールド制御するとともに、回避できないと判定された場合にはAT5をシフトダウン制御するように構成する。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌における自動追従制御の精度を向上させる車輌制御装置を提供する。
【解決手段】本発明は、倒立制御を行う先行車輌に対し、追従走行する車輌を制御する車輌制御装置であって、前記先行車輌からの走行状況データ(車輌速度、車体傾斜角)を受信する通信部81と、前記追従走行する車輌の加速度指令値を演算する主制御ECU21と、を備え、主制御ECU21は、通信部81によって受信した走行状況データから、前記先行車輌の状態を推定し、当該先行車輌の状態に基づいて、前記追従走行する車輌の加速度指令値を演算することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】追従走行制御中に、先行車を見失った場合であっても、運転者に不快感及び違和感を与えることなく、運転者のフィーリングに合った報知を行うことができるようにする。
【解決手段】先行車を捕捉する前方認識装置3と、前方認識装置3で先行車を捕捉した場合に、この先行車に対する追従走行制御を行う制御ユニット2と、前方認識装置3が先行車を捕捉したとき或いは捕捉した先行車が離脱したときに報知するブザー6cとを備え、制御ユニット2は、前方認識装置3が先行車をロストしたときはブザー6cによる報知を禁止する。
(もっと読む)
車両の走行制御装置
【課題】 停車時にレーダー装置の出力を低減した場合でも、先行車をロストすることなく確実な追従走行制御を行えるようにする。
【解決手段】 車速センサSbが自車の停車状態を検出すると、送信出力制御手段M1がレーダー装置Saの送信出力を走行時送信出力よりも低い停車時送信出力とする。自車停車中にレーダー装置Saにより自車と先行車との距離の増加が検出された場合、あるいは自車停車時にレーダー装置Saにより検知された先行車との距離が所定値よりも大きい場合に、報知手段M3が乗員に対して追従走行制御が可能なことを報知し、送信出力制御手段M1がレーダー装置Saの送信出力を停車時送信出力よりも増加させる。これにより、先行車との距離が追従走行制御手段M2による先行車に対する追従走行制御が可能な状態になったときにレーダー装置Saの送信出力を増加させ、先行車をロストすることなく確実に追従走行制御に移行することができる。
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】設定された先行車に追従する追従制御を行う車両用追従装置において、自車両100前方の他車両102の方向指示器が作動中であると判定された場合に、他車両102の方向指示器が作動中であると判定されなかった場合より、他車両102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を備える構成とする。これにより、自車両100前方の他車両102が車線を離脱する可能性が高いにも関わらず、不要に先行車として設定されることを防止する。また、他車両102が先行車として設定されている場合には、設定された他車両102が車線を離脱する前に、先行車としての設定を解除し易くする。
(もっと読む)
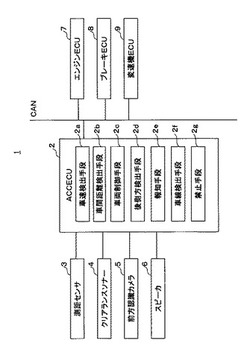
車両の運転のための調整戦略をサポートするための方法及び装置
本発明は、車両の運転のための調整戦略をサポートするための方法、装置、及びコンピュータ・プログラム製品、並びにそのような装置を備える自動車両に関する。本方法によれば、入力値Δvに基づいて、ターゲット車両について複数の加速度値aが特定され(36)、それらの入力値は、車両とターゲット車両の間の距離について検出された距離値である、又はそれらの距離値から導出される。その後、加速度値は、ターゲット車両の特徴を示すデータCDを得るために処理される(40)。その後、ターゲット車両の特徴を示すこれらのデータは、車両の運転を調整する(44)ために引き渡される(42)。 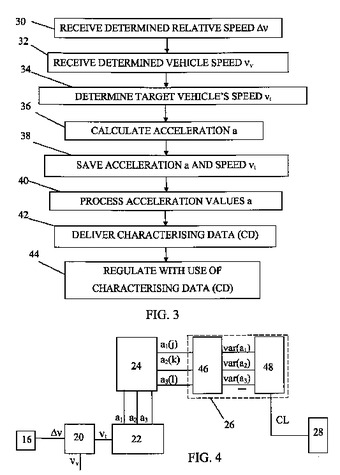 (もっと読む)
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】追越車線判定手段によって、利用可能な追越車線108が有ると判定された場合に、利用可能な追越車線108が有ると判定されなかった場合に比して、移動体102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を設ける。これにより、追越車線108を利用して追越し行うことができる場合に、移動体102を先行車と設定し難くする。そのため、運転者が自車両100より前方の移動体102を追い越す可能性が高いにも関わらず、不要に移動体102を先行車として設定することを防止する。
(もっと読む)
141 - 160 / 389
[ Back to top ]