
Fターム[3D244AD01]の内容
Fターム[3D244AD01]の下位に属するFターム
Fターム[3D244AD01]に分類される特許
1 - 20 / 129
車間距離制御装置
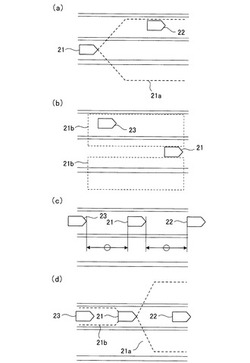
【課題】より安全性の高いACC走行時の車線変更を実現する。
【解決手段】隣接車線を走行する車両の間を目標スペースとして車線変更する際、隣接車線における先行車両22との車間距離と後続車両23との車間距離とが等しくなるよう車速を制御し、車線変更後は、先行車両22との車間距離をACC設定車間距離に戻す際、後続車両23との車間距離が基準車間距離Lbase以下のときは、減速度を限定した上で先行車両22との車間距離がACC設定車間距離Laccとなるような車速を決定することで、より安全性の高いACC走行時の車線変更を実現する。
(もっと読む)
運転支援装置

【課題】設定車速を微調整することができ、短時間で設定車速を設定することができるようにする。
【解決手段】車両の車速を設定車速に維持して走行させる定速走行制御手段33と、設定車速を所定の車速幅ずつ変更するための調整手段20と、調整手段20に対する操作を検出し、この操作に基づく車速幅で設定車速を設定する設定車速制御手段31と、設定車速制御手段31で設定された設定車速を表示する表示手段14とを備える。設定車速制御手段31が、調整手段20に対する連続的な操作の終了を検出したら、一定時間は操作に基づく設定に係る車速幅を、一定時間以外での操作に基づく設定に係る車速幅よりも小さくする。
(もっと読む)
運転支援装置
【課題】設定車速を容易に微調整することができ、短時間で設定車速を設定することができるようにする。
【解決手段】車速を設定車速に維持して走行する定速走行制御手段33と、設定車速を一単位車速ずつ増減調整するための調整手段、調整手段に対する操作を検出し、この操作に基づいて設定車速を設定する設定車速制御手段31と、設定車速制御手段31で設定された設定車速を表示する表示手段14とを備え、設定車速制御手段31が、調整手段への連続的な操作を検出したら設定車速を所定周期で連続的に増減させ、調整手段への連続的な操作を検出しても設定車速が一単位車速よりも大きい所定車速のときは設定車速を所定周期よりも長い所定時間変化させずに保持する。
(もっと読む)
車両の走行制御装置
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置
【課題】車速制限制御に切り換えられた際に、自車両の車速を制限車速に滑らかに収束させると共に、不自然な変速を防止する。
【解決手段】自車両の車速リミッタ作動領域に入っているか否かを調べ(S4)、リミッタ作動領域内に入った場合、ドライバのアクセル操作に基づくドライバ要求トルクTdとリミッタ制御のリミッタ要求トルクTlmとを比較し(S6)、Td>Tlmの場合、リミッタ要求トルクTlmを目標トルクTGTとして設定し(S7)、Td≦Tlmの場合、ドライバ要求トルクTdを目標トルクTGTとして設定し(S8)、自車両の車速をリミッタ車速に円滑に収束させる。また、このとき、クルーズ制御における仮想アクセル開度を用いてリミッタ制御時の変速を制御することで、不自然な変速を防止する。
(もっと読む)
追従走行制御装置
【課題】センサで検出でき且つ車車間通信可能な先行車をより容易に選択することを可能にする。
【解決手段】レーダ8の信号をもとに決定した先行車までの距離及び速度と、車車間通信で他車から取得した車両情報をもとに決定した当該他車から後続車までの距離及び当該他車の速度とをもとに、当該先行車と当該他車とが同一であるか否かを判別する。そして、同一と判別した場合に、レーダ8で捕捉している前記障害物センサで検出している先行車が車車間通信可能な先行車であることをユーザに認識させる従可能先行車捕捉情報の表示を表示装置10で行わせる。また、ユーザの入力操作に従って、レーダ8で捕捉している先行車を追従先として選択した場合には、当該先行車を追従先と決定して追従走行制御を行う。
(もっと読む)
車両走行制御装置
【課題】自車両の前方を走行する先行車両に自車両を追従させる追従走行制御の実行時に、先行車両を見失うロスト状態が発生した場合に、自車両の走行状態を適正に制御できるようにする。
【解決手段】自車両の前方を走行する先行車両を検出する先行車両検出手段1と、該先行車両に追従させるように自車両の走行状態を制御する車両用走行制御装置であって、上記先行車両検出手段1の検出信号に応じて先行車両のロストが発生したか否かを判定するロスト判定手段9と、該ロスト判定手段9により先行車両のロストが発生したと判定された場合に自車両の走行速度を設定車速に一致させるように制御する走行制御手段8と、上記先行車両のロスト発生時における先行車両と自車両との車間時間に応じて自車両を加速するための加速度を設定し、上記車間時間が長い場合には小さい場合に比べて小さな値の加速度を設定する加速度設定手段10とを備えたものである。
(もっと読む)
車間距離自動可変システム及びその方法
【課題】道路が乾いた状態か、雨や雪に濡れた状態かを判断し、道路の状態に従い前車との距離を自動可変することができる車間距離自動可変システム及びその方法を提供する。
【解決手段】 本発明は、車両前方の道路を撮影するカメラと、前記カメラを介し撮影された原本映像データに対し、予め定められた映像処理を行った標準映像データを利用して道路状態を判断した後、その判断結果に対応して車間距離を制御する制御部とを含み、 前記制御部は、前記標準映像データから雨水の帯又は白色成分が検出される場合、濡れた状態の道路と判断し、濡れた状態における車間距離を、前記乾いた状態における車間距離より長く設定することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両制御装置
【課題】全加減速シーンにおける加速性能を低下させることなく、エネルギー効率の向上を図る。
【解決手段】目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内か否かを判定し、目標加減速度Adと境界加減速度Anに基づいて新たにエンジンの駆動が必要と判定した場合でも、目標加減速度Adと、境界加減速度Anのうち目標加減速度Adに最も近い境界加減速度Amとの差分が加速度規定範囲ΔAd内であると判定された場合、目標加減速度Adを駆動中のモータにより実現可能な加速度に変更する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】カメラ17で制限車速標識を撮像し、撮像した画像から制限車速情報を読み取ることをしなくても、地図データに示された制限速度情報を更新可能とする。
【解決手段】地図データの情報に基づき取得した走行道路の制限車速情報、及び運転者が車速変更のために操作する目標車速変更操作子の操作情報に基づき目標車速を求め、その求めた目標車速となるように車両の制駆動力を制御する。また、本発明は、上記目標車速変更操作子の操作を検出すると、上記地図データ中の制限車速切り替わり位置SPの情報を更新する。
(もっと読む)
車両用運転支援装置
【課題】道路上の制限速度が変化した場合のセット車速の変更を、ドライバの意思を尊重しつつ容易に行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ステレオ画像認識装置4でセット車速Vsetと異なる制限速度Vlimを検出したとき、セット車速Vsetの値を制限速度Vlimに切換可能なスタンバイモードを一時的に実行し、スタンバイモードの実行中はセット車速Vsetと制限速度Vlimとを対比可能に表示するとともに、ドライバの操作状態に応じてセット車速Vsetの維持或いは制限速度Vlimへの切換を選択的に行う。
(もっと読む)
車速制限装置
【課題】無用な加減速が生じない車速制限装置を提供する。
【解決手段】車両の走行速度を検出する車速センサ11と、乗員により設定された制限速度を記憶する記憶部15と、乗員のアクセル操作に関わらず走行速度が制限速度以下となるように車速制限制御を行う電子制御装置20と、乗員の操作により車速制限制御を中断する中断スイッチ14と、乗員の操作により車速制限制御を再開する再開/増加スイッチ13と、を備えた車速制限装置1において、乗員の操作により制限速度を変更する制限速度変更手段を備え、電子制御装置20は、走行速度が記憶部15に記憶されている制限速度よりも所定値以上大きいときに制限速度変更手段が操作された場合には、制限速度を制限速度変更手段が操作されたときに車速センサ11により検出された走行速度とほぼ等しい値に変更する。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】定速走行制御下における燃費性能の改善を図ると共に、高度な安全性を有するハイブリッド電気自動車の制御装置を提供する。
【解決手段】ハイブリッド電気自動車(1)の制御装置(26)は、走行路面の勾配情報を取得する手段(17)と、走行速度を検出する手段(16)と、車間距離を検出する手段(18)と、走行路面が下り勾配を有する場合に、下り勾配の最下地点bより手前側に設定された惰性走行開始地点aから惰性走行を開始し、車間距離が所定車間距離L1未満となった場合に前記惰性走行を中止する制御手段(26)とを備える。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行などの自動走行に移行する際に、運転者に与える違和感を抑えることを可能とする。
【解決手段】運転者によるステアリングスイッチ28の操作によって定速走行に移行する際に、エンジン停止の処理中若しくはエンジン停止処理に移行したと判定すると、EVモードに移行することなく、エンジンを運転状態に復帰させる処理を行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 運転者の要求する走行状態を応答よく実現可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 ハイブリッド車両が車速指令値に基づいて走行制御をしているモータ走行モードにおいて、駆動トルク指令値に運転者が所定加速を要求したときの加速用駆動トルクを加算した値がモータ駆動分上限値を越えたときはエンジン併用走行モードを選択することとした。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両走行制御装置
【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
車両の運転支援装置
【課題】渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、追従走行時の自車速Vが高速側の所定車速に設定された第1の車速V1から、当該第1の車速V1よりも低速側に設定された渋滞判定用の第2の車速V2以下まで減速したとき、B_ECU10を通じてハザードランプ20を点滅させる。これにより、渋滞時に適切なタイミングで違和感なくハザードランプを点滅させることができる。
(もっと読む)
1 - 20 / 129
[ Back to top ]