
Fターム[3D246AA05]の内容
ブレーキシステム(制動力調整) (55,256) | 用途 (1,456) | 前輪駆動車 (72)
Fターム[3D246AA05]に分類される特許
1 - 20 / 72
ブレーキ制御装置
【課題】ブレーキ踏み上げ操作の際、ペダルストロークに対するホイールシリンダ液圧特性が段付き特性になるのを抑えることで、制動減速度のフィーリングを向上すること。
【解決手段】ブレーキ制御装置は、マスターシリンダ13と、VDCブレーキ液圧ユニット2と、ブレーキスイッチ93と、ブレーキコントローラ7と、を備える。VDCブレーキ液圧ユニット2は、両M/Cカットソレノイドバルブ25,26と、低圧リザーバ23からブレーキ液を吸い込む液圧ポンプ22と、によりポンプアップ液圧を発生する。ブレーキコントローラ7は、ブレーキ踏み上げ操作の際、少なくともマスターシリンダ13内のブレーキ液が低圧リザーバ23に流れ込むストローク位置S2から、ホイールシリンダ液圧の低下が終わるストローク位置S3までを含むストローク領域において、ペダルストロークの上昇に対して滑らかな勾配にて前記ホイールシリンダ液圧が増加するように両M/Cカットソレノイドバルブ25,26を制御する(図3)。
(もっと読む)
車両の運動制御装置

【課題】簡単な構成でハンドル角が小さな低横加速度旋回領域とハンドル角が大きな高横加速度旋回領域を含む全横加速度旋回領域において車両の運動状態を的確に制御して操縦安定性を高めることができる車両の運動制御装置を提供すること。
【解決手段】車速とハンドル角に基づいて目標ヨー角速度を算出し、算出された目標ヨー角速度と実際のヨー角速度との偏差が実質的に0になるよう車両の運動を制御するECU(制御手段)と、を備える車両の運動制御装置において、前記ECUは、ハンドル角が所定の閾値よりも小さい低横加速度旋回領域においてはハンドル角に比例する目標ヨー角速度を使用し、ハンドル角が前記閾値よりも大きい高横加速度旋回領域においてはハンドル角に依存しない最大横加速度で車両が定常円旋回するときのヨー角速度を目標ヨー角速度として使用して車両の運動を制御する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両のブレーキ制御装置
【課題】車両停止状態でのポンプモータの耐久性を確保しつつ、車両停止状態からの車速発生時、違和感を抑えた減速度やペダルフィールを達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧アクチュエータ2と、統合コントローラ9と、を備え、統合コントローラ9は、停車時モータオフ制御部(ステップS9)と、昇圧勾配制限部(ステップS15〜ステップS20)と、を有する。停車時モータオフ制御部は、ブレーキ操作により車両が停止するとき、VDCモータ21を停止し、車両停止中、VDCモータ21の停止状態を維持したままとする。昇圧勾配制限部は、停車時モータオフ制御を終了すると、ホイールシリンダ圧の昇圧勾配を制限により緩勾配にすると共に、昇圧前にマスターシリンダ圧の発生がある場合の昇圧勾配を、昇圧前にマスターシリンダ圧の発生がない場合の昇圧勾配より緩やかにする。
(もっと読む)
車両のブレーキ制御装置
【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
電動ブレーキ装置
【課題】ピストン及びその周辺部品の組付作業を容易にして組付性を向上させること。
【解決手段】前方に配置される第1スレーブピストン88bと、第1スレーブピストン88bの後方に配置される第2スレーブピストン88aと、前記第1スレーブピストン88bと前記第2スレーブピストン88aとの離間位置を規制する規制手段100と、前記第1スレーブピストン88bと前記第2スレーブピストン88aとを離間する方向に付勢する第2スプリング96aとを備え、連結ピン79を介して、第1スレーブピストン88b、規制手段100、第2スプリング96a、及び、第2スレーブピストン88aを一体的に組み付けて構成した。
(もっと読む)
車両用ブレーキ装置
【課題】 開閉弁によって2系統の圧力供給系を切り替えるブレーキ・バイ・ワイヤの車両用ブレーキ装置において、ホイールシリンダへの液圧供給開始時に、開閉弁の作動を保証すると共にブレーキの操作感を向上させる。
【解決手段】 ブレーキペダル11と、電磁弁である開閉弁24a・24bを備えた配管42a・42bを介して互いに接続されたマスターシリンダ15及びホイールシリンダ2b・3bと、ペダル操作量検出手段11aと、電動モータ12を備えたモータ駆動シリンダ13と、バッテリ7と、バッテリの電圧を検出する電圧センサ段51と、制御手段6とを有する車両ブレーキ装置であって、制御手段は、電源の電圧が閾値電圧以上である場合には、ペダル操作量に基づいてモータ駆動シリンダの駆動を開始する際には、開閉弁を開いた状態に維持してモータ駆動シリンダの駆動を開始し、モータ駆動シリンダの駆動を開始の後に開閉弁を閉じることを特徴とする。
(もっと読む)
クリープ車速制御装置
【課題】運転者による運転操作を複雑化することなく、クリープ速度を所望の速度に容易に調整することが可能なクリープ車速制御装置を提供すること。
【解決手段】ブレーキペダルの踏込量に応じてクリープ車速の目標車速を定める。そして、車両のクリープ車速が目標車速となるように、原動機16によって発生される駆動トルク及びブレーキ装置26によって発生される制動トルクを制御する。このため、車両の運転者は、ブレーキペダルの踏込操作により、車両のクリープ車速を、容易に所望の速度に調整することができ、さらに、その増減の調整も容易となる。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両の状態量計測用制御システム
【課題】駆動輪のみを回転させる台上試験において、従動輪を備える車両の状態量を治具を用いずに簡易に計測することが可能な車両の状態量計測用制御システムを提供する。
【解決手段】備えた車両の状態量計測用制御システム30は、駆動輪である左右前輪の車輪速度を検出する左右前輪速度センサ31a,31b及び従動輪である左右後輪の車輪速度を検出する左右後輪速度センサ31c,31dによって検出された左右前輪の車輪速度及び左右後輪の車輪速度に基づいて、車両を制御するENG−ECU33a,VSA−ECU33b,AHB−ECU33cを備え、ENG−ECU33a,VSA−ECU33b,AHB−ECU33cは、外部端末装置40から台上試験中である旨の信号が入力された場合には、左右後輪の擬似車輪速度を生成し、検出された左右後輪の車輪速度に代えて、生成された左右後輪の擬似車輪速度を左右後輪の車輪速度とする。
(もっと読む)
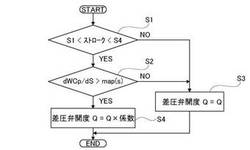
車両の制御装置
【課題】車両の旋回性能を向上させるために車両の駆動力および制動力を制御する場合に、共振の発生によるドライバビリティの低下を回避して、可及的に大きな旋回性能の向上効果を得ることができる車両の制御装置を提供すること。
【解決手段】車両の旋回走行時に駆動トルクもしくは制動トルクとして制御される制御トルクを該車両の駆動輪に付与することにより該車両のステアリング特性を変化させる車両の制御装置において、前記制御トルクを前記駆動輪に付与する際に、前記車両の共振周波数よりも低い値に設定される制限周波数以上の前記制御トルクを制限する周波数制限処理手段(ステップS4)と、前記旋回走行時に発生する前記車両の加速度に基づいて前記制限周波数を補正して更新する制限周波数補正手段(ステップS1,S2,S6)とを設けた。
(もっと読む)
電動ブレーキアクチュエータ取付構造
【課題】車両用ブレーキシステムの電動ブレーキアクチュエータを、パワープラント収納室に収納して強固な部位に取り付けられる電動ブレーキアクチュエータ取付構造を提供することを課題とする。
【解決手段】操作者のブレーキ操作が入力される入力装置14と、少なくともブレーキ操作に応じた電気信号でブレーキ液圧を発生させるモータシリンダ装置16と、が車両1に備わって構成される車両用ブレーキシステムにおける電動ブレーキアクチュエータ取付構造であって、モータシリンダ装置16が、車両1の左右両側において前後方向に延設されるフロントサイドメンバ7に取り付けられることを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力を小さくする旋回補助制御に於いて、車両の旋回性能の向上と車両の駆動性能や安定性の向上とを両立させる。
【解決手段】旋回内輪の前後力の低減量が目標低減量になるよう旋回内輪の前後力を低減し、所定の頻度にて所定の時間に亘り旋回内輪の前後力の低減量を目標低減量よりも小さくする。そして車両の駆動性能や車両の安定性を向上させる必要性が高いときには該必要性が低いときに比して、旋回補助制御中に於ける旋回内輪の前後力の積分値が大きくなるよう、必要性に応じて所定の頻度、所定の時間、低減量を小さくする量の少なくとも一つを変化させる。
(もっと読む)
車両用制動装置
【課題】失陥時のブレーキ操作部材の無効ストロークを低減可能な車両用制動装置の提供。
【解決手段】シリンダ部311内には、プライマリピストン36が移動可能に設けられており、セカンダリピストン33との間にプライマリ室PCが形成されている。プライマリ室PCは、ABSアクチュエータ5を介してホイルシリンダWC2,WC3に接続されている。プライマリピストン36の後方には、入力移動体38との間にアイドル室ACが形成されており、入力移動体38の後方には、支持壁42との間に駆動室DCが形成されている。初期制動時においては、アイドル室ACとパワー液圧源7との間のカット弁92を開状態とし、パワー液圧源7による駆動液圧を発生させずに、入力移動体38をプライマリピストン36に当接させないように前進させる。液圧ブレーキを開始する場合、ブレーキペダル22の操作量に応じて発生させた駆動液圧を駆動室DCに供給する。
(もっと読む)
差動制限機構の制御装置
【課題】差動制限機構の制御装置に関し、差動制限機構の作動時に発生する操舵反力変化を操舵アシスト力によって抑制するものにおいて、操舵アシスト力を付与できない操舵アシスト側のインタロック作動時にも操舵反力変化を抑制することができるようする。
【解決手段】車両の左右輪4FR,4FLの差動を制限する差動制限機構5と、車両の操舵に対しアシストトルクを付加するパワーステアリング機構8とを有し、差動制限機構5の動作に応じて、パワーステアリング機構8の制御量を増減制御する制御手段10とを有すると共に、パワーステアリング機構8のインタロックの作動を検出するインタロック作動検出手段を有し、制御手段10は、インタロック作動検出手段によりインタロックの作動を検出した際には、差動制限機構5の制御量を減少させる。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
車両の制動制御装置
【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
1 - 20 / 72
[ Back to top ]