
Fターム[3D246AA13]の内容
ブレーキシステム(制動力調整) (55,256) | 用途 (1,456) | 大型車両、多軸車 (64)
Fターム[3D246AA13]に分類される特許
1 - 20 / 64
車両の危険回避支援装置
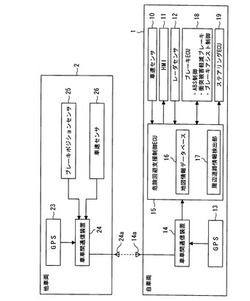
【課題】自車両の前方の他車両における急ブレーキ操作を早期に検出し、車両の運転者による危険回避操作の支援を行なうことができるようにした、車両の危険回避支援装置を提供する。
【解決手段】
他車両2の位置情報と、他車両2のブレーキ操作情報とを含む他車両2の情報を検出する他車両情報検出手段14と、車両1の運転者による危険回避操作を支援する危険回避支援手段18,19とを備え、自車位置情報検出手段13及び他車両情報検出手段14からの情報に基づいて、車両1の前方に他車両2がいることが検出された場合、少なくとも他車両2において急ブレーキ操作がされていることを含む危険回避支援条件が成立したら、危険回避支援手段18,19により危険回避操作を支援する危険回避支援制御手段を備える。
(もっと読む)
隊列走行制御装置

【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
車両のブレーキ装置
【課題】後扉を開けた状態やアイドリングストップの作動によってストールトルクが発生しなくなった状態で、車両が動き出さないように保持できるとともに、車両の停車と同時に作動し、作動時における衝撃を緩和することができるブレーキ装置を提供する。
【解決手段】フロント側ブレーキブースタとを接続する第1のエア管路と、リア側ブレーキブースタとを接続する第2のエア管路と、エアタンクとフロント側ブレーキブースタとを接続する第1のバイパスエア管路と、エアタンクとリヤ側ブレーキブースタとを接続する第2のエア管路と、エア管路に設けたブレーキバルブと、を有し、前記第1のバイパスエア管路上の第1のブレーキコントロール側バルブ及び前記第2のブレーキコントロール側バルブを、前記車両のアイドリングストップ時に所定時間ずらしたタイミングで開放するタイムラグリレーを設けた。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム
【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
ブレーキ制御装置
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
自動車走行制御装置
【課題】 アクセルペダルの誤操作踏込事故を防止できる自動車走行制御装置を提供すること。
【解決手段】 アクセルペダルの急激な踏み込みを阻止する方向の抵抗力を発生する抵抗力発生機構を設け、上記抵抗力に抗してアクセルペダルを踏み込んだときオンする動作スイッチを設け、アクセルペダルアームにアクセルペダルの踏み込みによりオンするアクセルアームスイッチを設け、上記動作スイッチのオン状態において電源バッテリーを上記アクセルアームスイッチに供給可能に構成し、上記アクセルアームスイッチのオン状態において上記電源バッテリーを該アクセルアームスイッチを介して配電部に供給することにより燃料カット装置を作動し得るように構成し、上記アクセルペダルの上記抵抗力に抗しての急速な踏み込みに基づく上記動作スイッチと上記アクセルアームスイッチのオンに基づいて上記燃料カット装置を作動させる。
(もっと読む)
制動制御装置、車両、および制動制御方法
【課題】サービスブレーキと補助ブレーキとを併用しつつブレーキ操作に違和感を与えないこと。
【解決手段】ブレーキペダル2の踏み込み量に応じて減速度が変化するサービスブレーキと制動が開始されると予め決められた所定の推移で減速度を発生する補助ブレーキとによる車両の制動を制御する制動制御装置1において、運転者のブレーキペダル2の踏み込み量に相応する要求減速度に対し、サービスブレーキによる減速度と補助ブレーキによる減速度とを配分する減速度配分計算部22を有し、減速度配分計算部22は、要求減速度が補助ブレーキの減速度を超えないときは補助ブレーキによる減速度のみを要求減速度に対して配分する。
(もっと読む)
トラクションコントロール装置
【課題】駆動輪のスリップ状況に応じて各車輪の駆動力を適切に分配することができ、十分な加速性および旋回走行時のコーストレース性を確保できるトラクションコントロール装置を提供すること。
【解決手段】トラクションコントロール装置は、車輪の回転速度検出手段43FL〜43CRと、回転速度に基づき差動調整機構の制御を行うか否かを判定する制御開始判定手段82と、制御開始判定手段82の判定結果に基づき差動調整機構の制御を行う差動調整機構制御手段85とを備え、制御開始判定手段82は、左右輪回転速度差算出部と、左右輪の回転速度差が左右輪回転速度差用の所定の閾値以上となるか、または左右輪の回転速度比が左右輪回転速度比用の所定の閾値以上となった場合に、差動調整機構の制御を開始すると判定する制御開始判定部とを備える。
(もっと読む)
車両運動制御装置
【課題】ロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することができるようにする。
【解決手段】実横加速度Gyrが目標横加速度Gth以上であったとしても、舵角横加速度Gysとヨーレート横加速度Gyyの少なくとも一方が目標横加速度Gth未満になったときに、制御対象輪のW/C圧の増圧を禁止するようにしている。このため、横転を抑制するために積極的にアンダーステアを発生させるようにしてロール角が大きくなることを抑制しつつ、さらにアンダーステアを増大させる必要が無くなったときに、早期にアンダーステアの増大を抑制することが可能となる。
(もっと読む)
車両運動制御装置
【課題】不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能な車両運動制御装置を提供する。
【解決手段】車両への積載重量に応じて横転抑制制御を許可する基準値となるしきい速度Vtを変化させる。このため、積載重量が大きく、横転し易い車両状態のときには、車速がより低速となっても横転抑制制御が実行されるようにすることができる。これにより、車速が横転傾向情報に応じた速度となるまで横転抑制制御を行うことが可能となる。また、車両への積載が行われていない非積載状態のときにはしきい速度Vtが大きな値となるため、車両が横転する可能性がないような場合にまで不必要に横転抑制制御が実行されてしまうことを抑制することができる。よって、不必要に横転抑制制御が為されることを抑制しつつ、車両状態に対応した横転抑制制御を行うことが可能となる。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
自動制動制御用ECU、車型学習方法および車両
【課題】自動制動制御用ECUを複数の車型の車両で共通化すること。
【解決手段】複数の異なる車型の車両に搭載され、車両の自動制動制御装置3を制御する自動制動制御用ECU1であって、車型および当該車型に対応するセンサの情報を、これらの情報を保持する車両ECU2から取得して記憶する車型情報学習部10と、車型情報学習部10が記憶した情報に基づいて車両に適合する制動制御パターンを選択する制動制御パターン選択部11と、を有する。
(もっと読む)
作業用車両の走行装置
【課題】蓄電装置の過充電を防止すると共に、主ブレーキ装置の過熱による破損やブレーキ力不足の発生を防止し、減速時に十分なブレーキ力を確保しかつ燃費改善も十分に図る。
【解決手段】減速走行時には、それ以外の走行時よりもHSTの油圧モータの容量を増加又は油圧ポンプの容量を減少させ(S6)、この状態で車両の運動エネルギーをHSTを介して回生する。減速走行時でかつ蓄電装置の蓄電量が設定値より小さい場合には、回生したエネルギーにより発電・電動機を発電機として動作させて発電し(S11)、この発電した電力を蓄電装置に蓄電し、このとき補助ブレーキ装置が動作中であれば、発電量の増加に応じて補助ブレーキ装置のブレーキ力を減じるかオフとする(S8)。減速走行時でかつ蓄電装置の蓄電量が設定値より大きい場合には、回生したエネルギーによる発電・電動機の発電動作をオフとし(S13)、補助ブレーキ装置を作動させる(S12)。
(もっと読む)
車両用電子制御装置
【課題】個々の運転者のトレーラーの使用方法によって、別の機能を制御するのに適したトレーラー電子制御装置を要求していた。個々の運転者に向けた特殊な制御の提供は、高価である。
【解決手段】ECUが制動に関連する車両に特定の制御パラメータを記憶するための不揮発性記憶手段を有するものであり、該ECUは、車両の一又は複数の補助機能用の動作データを保持するプログラマブル記憶手段をさらに別個に備え、前記データは、エラー状態に対して制動機能を保護するように所定のリストを参照して一又は複数の入出力変数及び制御アルゴリズムを検査するのに使用可能である。
(もっと読む)
車両の軸重移動装置
【課題】車両の軸重移動装置に関し、従動軸から駆動軸への軸重移動時に従動輪のブレーキロックを確実に防止することができるようにする。
【解決手段】駆動軸と従動軸からなる後2軸の車両に備えられ、従動軸にかかる軸重を駆動軸に移動させる軸重移動装置において、従動軸から駆動軸へ軸重が移動している場合に、従動軸が枢支する従動輪に伝達されるブレーキ力をカットするブレーキカット手段41を備える。
(もっと読む)
車両のブレーキ制御装置
【課題】勾配センサ等を設けたり、複雑な演算を要することなく、坂道発進補助装置の制動力解除を適切なタイミングで行うことのできる車両のブレーキ制御装置を提供すること。
【解決手段】坂道発進補助機能により制動力が保持されている状態から発進する際に、車軸トルクが、発進段に応じて設定された車軸トルク規定値以上となったときに、坂道発進補助機能を解除する(S4、6)。
(もっと読む)
車両の走行安全制御装置
【課題】事前に渋滞末尾を予測し、自車両が渋滞末尾に近づいたときに被害軽減ブレーキの準備を行うことで、走行路の状況に関わらず円滑に被害軽減ブレーキ制御を実行することのできる車両の走行安全制御装置を提供すること。
【解決手段】カメラに撮影した「渋滞」の文字を含む電光表示を抽出し(S1)、当該表示内容に応じて渋滞末尾を推定し(S4)、当該渋滞末尾までの距離が所定距離未満であるときには被害軽減ブレーキの準備を行う(S5,S6)。
(もっと読む)
機械式自動変速装置の制御システム
【課題】変速時間が長くなることなく変速ショックを低減でき、更に変速のチューニングの作業工数を低減しコストを低減する。
【解決手段】摩擦クラッチ切断時の車速センサ10とギヤ段数より次段目標回転数設定部41にて次段目標回転数を設定し、また、摩擦クラッチ切断時のエンジン回転数と次段目標回転数より実回転数差算出部44にて実回転数差を演算し、目標回転数差設定部45にて摩擦クラッチ切断時のエンジン回転から圧縮開放式エンジンブレーキマップを基に目標回転数差を設定し、回転数同期部46にて実回転数差が目標回転数差以上か判定し、目標回転数差以上であれば圧縮開放式エンジンブレーキ6を作動させる。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
電子コントロールされる駐車・ブレーキ・システム
本発明は、乗り物のための駐車・ブレーキ・システムに関し、前記駐車・ブレーキ・システムは、駐車・ブレーキECU(20)を通じて電子コントロールされ、前記乗り物のユーザが前記駐車・ブレーキの付勢の程度をコントロールすることが可能な駐車・ブレーキ入力デバイス(10)から受信された信号に従って比例ブレーキング効果を達成し、前記駐車・ブレーキ入力デバイス(10)が、前記ユーザが、第1の位置と第2の位置の間においてベース(12)に関して変位させて、前記駐車・ブレーキの付勢の程度をコントロールすることが可能な操作部材(14)と、前記第1の位置と前記第2の位置の間における前記ベース(12)に関する前記操作部材(14)の瞬時位置を決定する少なくとも1つのセンサ(16)と、前記ユーザによって要求される前記駐車・ブレーキの付勢の程度を示すデジタル信号を生成するため、およびこのデジタル信号を少なくとも前記駐車・ブレーキECU(20)に伝達(19,22)するためのコントローラ回路(18)とを包含する。 (もっと読む)
1 - 20 / 64
[ Back to top ]