
Fターム[3D246GB40]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 複数のブレーキ制御機能の協調連携 (77)
Fターム[3D246GB40]に分類される特許
21 - 40 / 77
車両の協調制御装置
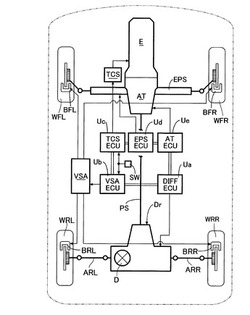
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
左右輪駆動装置、前後輪駆動装置及びその制御方法

【課題】各出力要素を回転自由に設定可能な差動装置、この差動装置を用いた前後輪駆動装置及び、この前後輪駆動装置の制御方法を提供すること。
【解決手段】差動装置1は、2つの出力要素間に回転差を発生させるものである。この差動装置1は、2個の遊星歯車機構20a、20bを組み合わせた遊星歯車機構組2を有してなる。遊星歯車機構組2では、キャリア21は、各遊星歯車機構20a、20b間で相互に連結されている。一方の遊星歯車機構20aのリングギア22aがブレーキ機構251により回転を停止可能なように構成されていると共に他方の遊星歯車機構20bのリングギア22bが差動モータのモータ軸に連結されている。さらに、各構成要素のうちサンギア23が、各出力要素にそれぞれ、直接的又は間接的に連結されている。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
車両用制動システム
【課題】 サービスブレーキのフェードやベーパロックを抑制した車両用制動システムを提供する。
【解決手段】 制動ECU41は、ステップS17で降坂フラグFaとフェードフラグFbとの少なくとも一方が1であるか否かを判定し、この判定がYesであればステップS18でフェード抑制処理を実行する。次に、制動ECU41は、ステップS19で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS20で加圧処理を実行する。次に、制動ECU41は、ステップS21で加圧フラグFcが1であるか否かを判定し、この判定がYesであればステップS22で高G制動処理を実行する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
自動二輪車のブレーキ制御装置
【課題】前後輪連動ブレーキ・バイ・ワイヤ方式のブレーキシステムにおいて、ABS作動により、スポーツ走行機能が低下しないようにする。
【解決手段】ブレーキ連動判別部36は、後輪側のブレーキ操作(ペダルの操作)による入力液圧が連動ブレーキ開始圧力値以上になったときに前輪ブレーキを開始させる。連動ブレーキ開始圧力値は、スイッチ40によりABS作動時とABS非作動時とで切り替え可能にする。ABS作動時は連動ブレーキ開始圧力値として下部圧力値を選択し、ABS非作動時は連動ブレーキ開始圧力値として上部圧力値を選択する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
連続常用制動機を統合された制動システム
本発明は、車両(10)の制動システムの制御方法であって、車両が少なくとも1つの機関(12)、常用制動機(20)及び連続常用制動機(22)を持ち、連続常用制動機(22)の制動作用を求めるために、
a)車両(10)の少なくとも加速段階中に、差滑り−駆動力−相関量(FK)が求められ、
b)少なくとも制動操作段階中に、連続常用制動機(22)により発生される制動力を示す連続制動力量(FDB)が、制動の際生じる差滑り(DS)、差滑り−駆動力−相関量(FK)、及び車両(10)の常用制動機(20)により発生される制動力成分(FV,FH)を使用して求められる。
(もっと読む)
ブレーキ装置
【課題】 ブレーキ装置において、バキュームブースタの負圧−助勢限界マスタシリンダ圧特性にバラツキがあっても、その特性に相当する負圧−助勢限界マスタシリンダ圧マップを適正に補正することで、特性バラツキの影響をできるだけ抑制して、ブレーキ装置に所望のブレーキ性能を十分に発揮させる。
【解決手段】ブレーキ装置のブレーキECU26は、負圧−助勢限界圧マップと、ブレーキ操作部材の踏込時にてバキュームブースタの実際の助勢限界を超えていたか否かに判別された、ブレーキ操作部材の踏込解除時に取得した負圧とマスタシリンダ圧からなるデータと、を取得した負圧において比較し、該比較結果に基づいて負圧−助勢限界圧マップを補正する補正手段を備えている。
(もっと読む)
制動制御装置
【課題】電動パーキングブレーキの誤作動を防止しつつ安定したヒルホールド機能を確保できる制動制御装置を提供する。
【解決手段】制動制御装置を、車両の停車を判定する停車判定手段31,61と、路面の傾斜を判定する傾斜判定手段62と、路面の傾斜を前記停車判定手段よりも短時間で簡易判定する簡易傾斜判定手段32と、ドライバによるブレーキ操作を検出するブレーキ操作検出手段73と、停車判定手段による停車判定及び簡易傾斜判定手段による簡易傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出した場合に液圧式ブレーキの液圧を保持する液圧保持制御手段30と、停車判定手段による停車判定及び傾斜判定手段による傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出し又は液圧保持制御手段が液圧を保持している場合に電動パーキングブレーキを解除状態から制動状態へ移行させる電動パーキングブレーキ制御手段60とを備える構成とする。
(もっと読む)
車両の安全運転装置
【課題】 駐車場での安全運転を可能とする。
【解決手段】 ナビゲーション制御部8は現在地を駐車場の場所情報と比較して駐車場内にあるとき徐行推奨エリアに入っていると判別し、安全優先モードをオンする。運転制御部18は安全優先モードがオンのとき、アクセルペダル10の踏み込み量に比例したスロットル開度となるように電子スロットル12を制御し、このスロットル開度とエンジン回転速度に応じた最適な空燃比となるように電子制御燃料噴射装置13を制御する。安全優先モードがオンすると、運転制御部18はスロットル開度の上限が通常より小さい範囲で、アクセルペダル10の踏み込み量が或る値まではアクセルペダル10の踏み込み量に比例したスロットル開度、当該或る値以上は一定のスロットル開度となるように電子スロットル12を制御し、このスロットル開度とエンジン回転速度に応じた最適な空燃比となるように電子制御燃料噴射装置13を制御する。
(もっと読む)
省燃費運転システム
【課題】制御開始から下り坂開始点を過ぎるまでの目標速度を線形で徐々に減速させ、燃料カットと噴射を繰り返すことなく、省燃費で且つ円滑な運転フィーリングが得られる省燃費運転システムの提供。
【解決手段】車両の位置を特定する車両位置特定装置(2)と、車両進行方向に存在する下り坂のデータを記憶する記憶装置(11)と、車両(1)の速度(車速V)を計測する車速計測装置(3)と、制御装置(10)とを有し、該制御装置(10)は、車両の速度(V)と、下り坂のデータとから車両(1)の目標速度(要求車速Vd)を決定(演算)する機能を有する。
(もっと読む)
車両用ブレーキ装置
【課題】BBW式ブレーキ装置のスレーブシリンダによる制動中にABS装置が作動した場合、そのことをブレーキペダルの操作反力によって運転者に報知できるようにする。
【解決手段】マスタシリンダ11およびホイールシリンダ16,17,20,21間に配置されたスレーブシリンダ23は、ブレーキペダル12の操作力あるいは操作量に応じて電気的にブレーキ液圧を発生し、ABS装置24の作動時には前記制動力を減少、保持および増加させて車輪のロックを防止する。ABS装置24の作動中にマスタシリンダ11とストロークシミュレータ26との間に配置された反力許可弁25を開閉制御することにより運転者がブレーキペダル12から受ける操作反力を増減させるので、マスタシリンダ12が発生するブレーキ液圧で制動を行っていないにも関わらず、ブレーキペダル12の操作反力の増減によってABS装置が作動中であることを運転者に報知することができる。
(もっと読む)
車両制御装置
【課題】スイッチ操作によりシフトポジションをパーキングポジションに移行させると共に車両の電源オフ制御を行う場合に、その動作をスムーズに行うことのできる車両制御装置を提供する。
【解決手段】パーキングECU28は、パーキング速度条件が満たされてエンジンスイッチ24の操作で電源34を電源オフ状態に移行させようとしたときに、一時的にパーキング速度条件が不成立になった場合、アシスト制御によりパーキング速度条件を成立させるような制動力を発生させるために、ブレーキECU74を介してアクチュエータ18を動作させる。その結果、パーキング速度条件が再度成立しその状態が維持されPポジションへの移行と電源オフ状態への移行が実行できる。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
車両の空調および制動制御装置
【課題】車両減速中における空調装置の蓄冷器への蓄冷中に、圧縮機による冷媒供給が停止することにより発生する、圧縮機減速トルク消失による制動距離の増加や、乗員の不快感を抑制する。
【解決手段】蓄冷器40に蓄冷中に、それ以上の蓄冷が不可能になり、圧縮機1の作動を停止させたときに、空調用制御装置5から、変速機制御装置54に信号を送信し、無段変速機50の減速比を増加させて、圧縮機減速トルク消失にともなう、最終減速トルクの不足を補う。無段変速機50の代わりに、車両用交流発電機や、モータジェネレータの出力を増加させるように制御しても良いし、自動ブレーキ装置を差動させても良い。また、これら変速機50等のいずれかを選択しても、組み合わせて使用しても良い。
(もっと読む)
21 - 40 / 77
[ Back to top ]