
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
181 - 200 / 730
車両の運動制御装置
【課題】
車両が走行する路面状態、及び、操舵状態に応じた制動制御によって、適正に車両安定性を確保し得る車両の運動制御装置を提供する。
【解決手段】
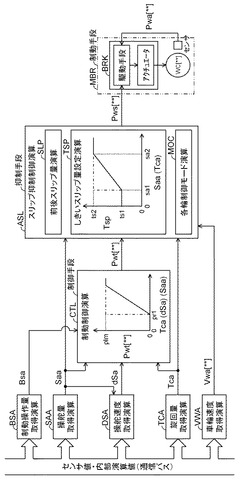
車両の運動制御装置の制御手段CTLは、車両の運転者によって操作される操舵操作部材の操舵状態Saa,dSa、及び、車両の旋回運動の程度を表す旋回量Tcaのうちで少なくとも1つに基づいて、車輪の制動トルクを増加する。車両の運動制御装置の抑制手段ASLは、各車輪の速度Vwa[**]に基づいて、各車輪の前後スリップ量Slp[**]がしきいスリップ量を超過する場合に車輪の制動トルクを調整して前後スリップ量Slp[**]を抑制する。そして、抑制手段ASLは、制御手段CTLが制動トルクを増加する場合にしきいスリップ量を増加する。また、抑制手段ASLは、車両の旋回外側前方車輪のしきいスリップ量を増加し、車両の旋回内側前方車輪のしきいスリップ量を保持する。
(もっと読む)
車両の制動制御装置

【課題】
車両の安定性を確保する車両安定化制御において、回生制動と摩擦制動とを効率的に協働し得る車両の制動制御装置を提供する。
【解決手段】
車両の車輪に摩擦制動トルクを付与する摩擦制動手段FRCと、車輪に回生制動トルクを付与する回生制動手段RGNと、制御手段CTLを備える。制御手段CTLは、車両の旋回状態の程度を表す旋回量Tcaに基づいて演算される第1状態量Tcx(例えば、ステア特性量Sch)に基づいて摩擦制動トルクを増加する摩擦制動制御を実行するとともに、旋回量Tcaに基づいて演算される、第1状態量Tcxとは異なる第2状態量Tcy(例えば、操舵速度dSa)に基づいて回生制動トルクを増加する回生制動制御を実行する。制御手段CTLは、回生制動トルクの増加を開始した後に、摩擦制動トルクの増加を開始する。また、回生制動手段RGNは、車輪のうちで少なくとも前輪に備えられる。
(もっと読む)
車両振動判別装置及び車両振動判別方法
【課題】ブレーキに起因する振動とタイヤ等に起因する振動とを判別可能な車両振動判別装置等を提供する。
【解決手段】車両振動判別装置を、車両の振動を検出する振動検出手段と、車両の制動状態及び非制動状態を検出する制動検出手段と、制動状態において検出された振動に関するデータと非制動状態において検出された振動に関するデータとをそれぞれ蓄積する振動データ記録手段と、制動状態において検出された振動と非制動状態において検出された振動とを比較することによってブレーキ起因の振動と車輪起因の振動とを判別する振動判別手段とを備える構成とする。
(もっと読む)
駆動制御装置
【課題】駆動制御装置において、より適切に慣性走行することを可能とする。
【解決手段】駆動制御装置(100)は、車両(1)の動力源(10)で発生した回転動力を車両の駆動輪に伝達する伝達状態、及び、回転動力を駆動輪に伝達せず前記車両に慣性走行させる非伝達状態のうちいずれか一方の状態からいずれか他方の状態へ切り替え可能な切り替え手段(23等)と、駆動輪の駆動を制動する制動力を駆動輪に対して付与する制動力付与手段(29等)と、運転者による車両の加速指示に応じて、いずれか一方の状態からいずれか他方の状態への切り替えを行う場合、切り替えの際の駆動輪の駆動力の変化を小さくさせる所定の制動力を付与するように制動力付与手段を制御する制御手段(42、43等)とを備える。
(もっと読む)
ハイブリッド自動車
【課題】運転者がブレーキペダルを踏む力を増大させることが可能な倍力機構を有するブレーキ装置を備えるものにおいて、運転者のブレーキペダルの踏み込みに応じて制動力が付与されるのをより適正に補助できる車両とする。
【解決手段】モータ走行の最中にモータからのトルク出力を停止すべき所定の異常として補機バッテリの電圧が閾値未満にまで低下する異常が生じたときには、エンジンが始動されて自立運転されると共にモータからのトルク出力が停止されるようエンジンとモータとを制御する。これにより、降坂路などで所定の異常が生じてモータからのトルク出力が停止されたとき以降に運転者によりブレーキペダルが踏み込まれたときに、補機バッテリからの電力を用いることができないときでもエンジンの負圧によって倍力機構が作動するから、より確実に車両に制動力を付与することができる。
(もっと読む)
車両の坂道発進支援ブレーキ装置およびその制御方法
【課題】運転者の操作を介さずに坂道等で停車状態を維持するのに必要なブレーキ力を保持するための方法を提供する。
【解決手段】本発明の一実施形態によれば、車両の停止中に車両の制動力を制御する方法が提供される。本方法は、(a)車両の停止を検出するステップと、(b)運転者によるブレーキ入力解除を検出するステップと、(c)運転者によるブレーキ入力解除時の車両の総ブレーキ力を算出するステップと、(d)車両の停止維持に必要なブレーキ力を計算するステップと、(e)算出された総ブレーキ力で車両の停止を維持できるかどうかを判断するステップと、(f)測定された総ブレーキ力で車両の停止を維持できないと判断されたときに、車両の総ブレーキ力を増加させるステップと、を有する。
(もっと読む)
車両の電力供給制御装置
【課題】エンジン停止後に再始動条件が成立した場合にエンジンを再始動させるとともに、車両の走行可能状態において特定条件が成立したことを要件として特定制御を実行するものにおいて、エンジンの始動に起因して特定制御が不安定になることを抑制する。
【解決手段】車両10は、スタータ21と、エンジン20の運転中に停止条件が成立した場合にエンジン20を自動停止させるとともに、エンジン停止後に再始動条件が成立した場合にスタータ21によりエンジン20を再始動させるECU33と、車両10の走行状態において特定条件が成立したことを要件としてアンチスキッド制御を実行するABS36と、ナビゲーション装置37及びオーディオ装置38と、バッテリ31とを備える。ECU33は、車両10の走行状態において特定条件が成立しており、且つ所定の再始動条件が成立している場合に、バッテリ31から装置37,38へ供給される電力を遮断する。
(もっと読む)
ブレーキ制御装置およびこれを備えたブレーキシステム
【課題】ヒルホールド機能の作動解除の操作性を向上するとともに、ヒルホールド機能を安定して制御する。
【解決手段】ブレーキ制御装置15の必要トルク演算部19は、勾配情報および車両諸元情報に基づいて車両が登坂路を発進するために必要な必要トルクを演算する。車両負荷度演算部20は、勾配情報および車両諸元情報に基づいて車両の負荷度を演算する。この車両負荷度に基づいて、ブレーキ解除点補正値演算部21がブレーキ解除点補正値を演算する。そして、このブレーキ解除点補正値に基づいて、必要トルク補正部22が必要トルクを補正し、補正された必要トルクに基づいてブレーキ解除の許可を判定する。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
ハイブリッド自動車
【課題】走行モードが切換えられる際のトルクショックを低減し、切換え後の変速制御を排除できるハイブリッド車を提供する。
【解決手段】車両1に搭載されるエンジン2と、走行用モータ4と、バッテリ12と、発電機3と、車速検出手段se1、se2と、バッテリの残容量Eqを検出する残容量検出手段16とを備え、残容量Eqが第1閾値Eq1以上の場合に第1走行モードEV、第2走行モードMs、第3走行モードMpのいずれかで走行するよう選択するモード選択手段A1を備え、モード選択手段A1は、残容量Eqが第1閾値未満の状況下では第1速度Sc1より小さい第2速度Sc2以上の場合に第3走行モード域Mpを選択し、所定の第2速度Sc2未満の場合に第2走行モードMsを選択し、第3速度未満Sc3の場合に第1走行モードEV又は第2走行モードMsを選択する。
(もっと読む)
制動制御装置、車両、および制動制御方法
【課題】サービスブレーキと補助ブレーキとを併用しつつブレーキ操作に違和感を与えないこと。
【解決手段】ブレーキペダル2の踏み込み量に応じて減速度が変化するサービスブレーキと制動が開始されると予め決められた所定の推移で減速度を発生する補助ブレーキとによる車両の制動を制御する制動制御装置1において、運転者のブレーキペダル2の踏み込み量に相応する要求減速度に対し、サービスブレーキによる減速度と補助ブレーキによる減速度とを配分する減速度配分計算部22を有し、減速度配分計算部22は、要求減速度が補助ブレーキの減速度を超えないときは補助ブレーキによる減速度のみを要求減速度に対して配分する。
(もっと読む)
車両ブレーキ装置
【課題】
簡易な構成で、信頼性の高い動作、及びシール性を確保することのできるリザーバを提供する
【解決手段】
リザーバは、シリンダと、シリンダの開口部に設けられたカバー部材と、前記シリンダと前記カバー部材とにより形成される空間に配設された弾性変位部材とを具備してなり、前記弾性変位部材は、前記シリンダと前記カバー部材との間で固定される固定部と、当該固定部から延設されてなる可変部とからなり、前記シリンダと前記カバーの前記弾性部材を固定する狭持部に、前記弾性部材の固定を強固にするための突部を設けたことを特徴とする車両ブレーキ装置。
(もっと読む)
ブレーキ制御システム
【課題】適切な介入制動を実行可能なブレーキ制御システムを提供する。
【解決手段】車両と車両の周囲の障害物とが衝突するまでに要する衝突予測時間を算出する衝突予測時間算出手段と、衝突予測時間が所定のサービスブレーキ作動閾値以下になった場合、サービスブレーキによる自動介入制動を開始する第2介入制動手段と、衝突予測時間が、サービスブレーキ作動閾値より長いリターダブレーキ作動閾値以下になった場合、リターダブレーキによる介入制動を開始する第1介入制動手段と、リターダブレーキ作動手段によるリターダブレーキの作動中、車両のドライバーにより衝突を回避するための衝突回避操作が実行されたか否かを判定する回避操作判定手段と、衝突回避操作が実行されていないと判定された場合、第2介入制動手段による自動介入制動の開始タイミングを通常より早くするタイミング変更手段とを備えることを特徴とするブレーキ制御システムである。
(もっと読む)
トラクションコントロール装置
【課題】駆動輪のスリップ状況に応じて各車輪の駆動力を適切に分配することができ、十分な加速性および旋回走行時のコーストレース性を確保できるトラクションコントロール装置を提供すること。
【解決手段】トラクションコントロール装置は、車輪の回転速度検出手段43FL〜43CRと、回転速度に基づき差動調整機構の制御を行うか否かを判定する制御開始判定手段82と、制御開始判定手段82の判定結果に基づき差動調整機構の制御を行う差動調整機構制御手段85とを備え、制御開始判定手段82は、左右輪回転速度差算出部と、左右輪の回転速度差が左右輪回転速度差用の所定の閾値以上となるか、または左右輪の回転速度比が左右輪回転速度比用の所定の閾値以上となった場合に、差動調整機構の制御を開始すると判定する制御開始判定部とを備える。
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、迅速な進路変更を可能とすると共に、進路変更後の車両安定性を好適に確保する。
【解決手段】
緊急操舵取得手段(MKQ)が、緊急操舵であることを取得した場合において、制御手段(CTL)は、前輪制動トルク、及び、後輪制動トルクを増加する。緊急操舵が取得された場合(Kqs=1)、前輪制動トルクに対する前記後輪トルクの比率である前後比率(Hzs)を、緊急操舵が取得されない場合(Kqs=0)の前後比率(Cno,Ko)に比較して小さい特性(Ckq,Kp)をもって前輪制動トルク、及び、後輪制動トルクを増加する。さらに、制御手段(CTL)は、後輪制動トルクの時間変化量(Kr)が、前輪制動トルクの時間変化量(Kf)よりも小さくなるように調整する。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
車両の運動制御装置
【課題】
運転者が障害物等を回避する緊急操舵において、路面の摩擦係数を用いることなく、路面状態に応じた好適な制動力制御を実行できる車両の運動制御装置を提供する。
【解決手段】
車両の車輪に制動トルクを付与する制動手段と、車両の操舵状態が緊急操舵であるか否かを取得する緊急操舵取得手段と、緊急操舵取得手段が前記緊急操舵であることを取得した場合において、車輪の制動トルクを増加する制御手段とを備える車両の運動制御装置であって、車輪速度を取得する車輪速度取得手段と、車輪速度に基づいて過大な前後スリップを抑制するスリップ抑制制御を実行するスリップ抑制手段とを備え、前記制御手段は旋回内側の前輪にスリップ抑制制御が実行される場合に、旋回外側の前輪に対する制動トルクの増加量を制限する制限制御を行う。
(もっと読む)
車両の運動制御装置
【課題】車両の運動状態が変化して実車挙動観測装置による推定運動状態量の推定演算が中断したときの推定運動状態量の誤差を小さくできる車両の運動制御装置を提供することを課題とする。
【解決手段】実車挙動観測装置302が推定重心すべり角βactを推定する推定演算の代替値となる定常値を算出する定常値算出部302aを備える。そして、実車の運動状態が変化して、実車挙動観測装置302の推定重心すべり角βactの推定演算に不連続点が発生したとき、実車挙動観測装置302は、定常値算出部302aが算出する定常値を代替値とする推定演算によって、推定重心すべり角βactを推定する。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援のための各種のデバイスに故障が発生した場合であっても適切な運転支援を実現する。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために、対象物及び車両の状況に応じて算出された衝突余裕時間及び対象物が車両の予測進路上に移動する可能性の度合いを示す推定危険度に基づき運転支援形態を判定し、判定された運転支援形態に基づき運転支援のための1つ以上のデバイスを制御することにより運転支援を実施する装置であって、デバイスの故障を検出する故障検出部20と、デバイスによる運転支援が安全に寄与する度合いを示す値である安全寄与率と、故障検出手段により検出された故障デバイスに関する情報とに基づき推定危険度を増加させる危険度増分値算出部12、推定危険度判定部13とを備える。
(もっと読む)
車両の停止保持制御装置
【課題】 停止保持制御によって停止している車両からのドライバの降車を防止することができる停止保持制御装置を提供する。
【解決手段】 停止保持ECU1は、停止保持制御を行っている間にドライバの降車意思を降車意思判定部1で判断する。ここで、ドライバの降車意思があると判断した場合には、制動力低下制御を行う。制動力低下制御では、車両に付与する制動力を低下させるとともに、ドライバに対して警報を発する。また制動力を低下させる際には、徐々に制動力を低下させる。
(もっと読む)
181 - 200 / 730
[ Back to top ]