
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
221 - 240 / 730
車速制御装置
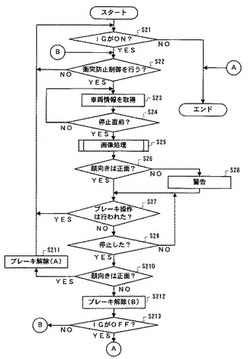
【課題】ACC制御に依存しすぎないようにするために行われるドライバに対する注意喚起を、当該ドライバの状態に応じて促すことができる車速制御装置を提供する。
【解決手段】本発明の車速制御装置は、車両前方の移動体に電磁波を照射し、当該移動体から反射された反射波を受信することにより上記移動体の移動に関する情報をターゲット情報として算出するターゲット情報算出手段と、上記車両の運転者の顔を撮像し、当該撮像された画像を用いて上記運転者の顔に関する情報を顔情報として算出する顔情報算出手段と、上記ターゲット情報に基づいて上記車両の車速を制御する車速制御手段と、上記車速制御手段によって上記車両が停止するときに上記運転者に対して警告動作を行う警告手段と、上記警告手段が行う上記警告動作の態様を上記顔情報に基づいて変化させる警報変更手段とを備える。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置

【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
アイドルストップ車の制御装置
【課題】エンジン再始動時のヒルスタートの制御に用いられる液圧制御バルブの消費電力の状態を考慮したアイドルストップの制御を行なう。
【解決手段】アイドルストップの制御によってエンジンを自動停止する前に、それまでの走行中の通電駆動によりブレーキアクチュエータ7のソレノイドバルブ群8のブレーキ液圧制御バルブ8a、8bが所定温度以上になっているか否かを、ブレーキ制御ユニット13の判断部13dにより判断し、ヒルスタートの制御に用いられるブレーキ液圧制御バルブ8a、8bが所定温度以上の高温の状態であってその消費電力が大きい状態であると判断すれば、ブレーキ制御ユニット13の禁止指令部13bによりアイドルストップの制御を禁止し、ブレーキ液圧制御バルブ8a、8bの消費電力の状態を考慮して、エンジンの再始動が確実に行なえるときにのみアイドルストップの制御を行なう。
(もっと読む)
運転操作補助装置
【課題】運転操作補助装置において、自車両の前方の先行車や静止障害物への距離や相対速度によりブレーキ操作量やアクセル操作量を最適に補正して運転者の操作能力を違和感なく補助することにある。
【解決手段】制御手段(2)は、先行車に続いて自車両を停止させる場合に先行車が停止してから自車両が停止するまでの標準時間を記憶し、検出した先行車との車間距離と検出した自車両の速度と先行車が停止してから自車両が停止するまでの標準時間とから先行車に続いて自車両を停止させる場合の目標ブレーキ操作量を算出し、算出された目標ブレーキ操作量と検出されたブレーキ操作量とからブレーキ補正量を算出し、この算出されたブレーキ補正量に基づいてブレーキ操作量を補正する。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
内燃機関の制御装置
【課題】本発明は、検出されないシステム異常にも対処できる出力制御を提供すること、退避走行可能な出力制御を行うこと、うっかりミスなどの誤作動に配慮した高精度な判断を行う出力制御を提供すること、信頼性を高めることを目的としている。
【解決手段】このため、運転条件に応じて内燃機関に設けたスロットルバルブを目標開度になるようアクチュエータを駆動する電子スロットルシステムを備えた内燃機関の制御装置であって、運転条件に異常を検知した際にスロットル開度をリンプホーム開度として車両の退避走行を可能とする内燃機関の制御装置において、ブレーキ操作を検知するブレーキ操作検知手段を設け、制御装置は、異常検知の有無に関わらず、アクセルペダルの操作中に後からブレーキ操作が加わった場合、操作順序の成立に基づいて目標開度をリンプホーム開度とし、スロットル開度をリンプホーム開度にアクチュエータを駆動する。
(もっと読む)
車両用ブレーキ制御装置
【課題】 アイドリングストップ制御によりエンジンを再始動させるときに、スタータモータに対して優先的に電力を供給することができる車両用ブレーキ制御装置を提供すること。
【解決手段】 ブレーキ電子制御ユニット45は、エンジン電子制御ユニット46がスタータモータ14によってエンジン11を再始動させているとき、ブレーキ液圧制御部30に設けられてブレーキ液圧を加圧するためのモータを駆動させない。これにより、バッテリ49からの電力を優先的にスタータモータ14に供給することができ、エンジンの再始動が失敗する可能性を大幅に低減できる。また、ユニット45は、エンジン11の再始動が失敗したとき運転者によるブレーキペダルBPの操作に応じて前記モータを駆動させて制動力を付与する。これにより、エンジン11の再始動が失敗した場合であっても、車両10が移動することを防止することができ、運転者が覚える不安を解消することができる。
(もっと読む)
車両制御装置
【課題】車両を減速させる際に、摩擦ブレーキとエンジンブレーキを協調させ、運転者に違和感を与えることなく燃料消費をさらに抑制することができる車両制御装置を提供する。
【解決手段】この発明による車両制御装置は、減速意思入力手段から出力された減速意思量に基づいて第一の目標減速度と第二の目標減速度を演算し前記演算した第一の目標減速度と前記第二の目標減速度を夫々出力する目標減速度演算器を備え、エンジンブレーキ制御手段により車両の減速度が前記第一の目標減速度となるようにエンジンブレーキを制御し、摩擦ブレーキ制御手段により前記第二の目標減速度となるように摩擦ブレーキ装置を制御するようにしたものである。
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
車両の走行制御装置
【課題】ブレーキランプ23が点灯することなく走行制御装置の異常によって車両にブレーキが働くことを避ける。
【解決手段】衝突予知手段15からブレーキ作動信号を受けてブレーキ機構を作動させるブレーキ制御手段11と、該衝突予知手段15からランプ点灯指示信号を受けてブレーキランプ23を点灯させるランプ点灯回路13とを備え、ブレーキ制御手段11は、ブレーキ作動信号を受けたとき、ブレーキランプ23が点灯していることを条件としてブレーキ機構12による車両制動力を発揮させる。
(もっと読む)
車両運動制御装置
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達させるため最適な軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値を設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、目標位置の車体横方向の成分Ye、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、最短回避軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、最短距離XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、目標位置及び目標位置における速度方向に到達させるために回避距離が最短となる軌道及び車体合成力を導出する。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
航空機用非対称電気制動機構
【課題】航空機用電気制動機構における正常系システム及び緊急系システムの共通モード障害リスクを軽減すること。
【解決手段】本願発明は,いくつかの電気機械制動アクチュエータ(EBA)を備え,正常モードにおいて,制動指令に応答して制動設定値を生成するための制動制御ユニットと,複数の電気機械アクチュエータ制御器(EMAC)であって,それぞれ交流電源によって給電され,制動設定値に応答してEBAに電力を供給する少なくとも一つのインバータをそれぞれ含む電気機械アクチュエータ制御器と,直流電源だけから給電される少なくとも一つの緊急制動電源及び制御ユニット(EBPCU)であって,制動指令に応答してEBAのいくつかに電力を供給する少なくとも一つのインバータを含む緊急制動電源及び制御ユニットと,機構に電力が流れることを防止すると共に,アクチュエータに対してEMAC又はEBPCUが供給する電力を伝えるための保護手段と,を備える。
(もっと読む)
ブレーキ制御装置および電磁弁の作動判定方法
【課題】ブレーキ制御装置の作動流体通路に配設された電磁弁の作動状態を判定する。
【解決手段】ブレーキ制御装置は、車両の各車輪に対応して設けられるホイールシリンダに作動流体を供給して制動力を付与する。ホイールシリンダへの作動流体の流路には、ソレノイドとソレノイドへの電流の印加によって作動するプランジャとを有する電磁弁が配設される。電流指令部106は、プランジャを作動させるための起動電流を電源からソレノイドに供給する。電流計測部102は、ソレノイドを流れる電流値を計測する。バルブ作動判定部104は、ソレノイドへの電流の供給開始後、電流計測部102により計測された電流値が予め定められた値以上低下したとき、プランジャが作動したと判定する。プランジャが作動したと判定されたとき、電流指令部106は、起動電流よりも電流値の低い保持電流をソレノイドに供給する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両のヨーモーメントを制御する駆動力配分装置および横滑り防止装置の制御干渉を最小限に抑えながらヨーモーメントの制御効果を最大限に発揮させる。
【解決手段】 左右の後輪WRL,WRRにトルク配分可能なリヤディファレンシャルギヤDrの作動だけで目標ヨーモーメントが発生可能であるときには、リヤディファレンシャルギヤDrだけを作動させる。目標ヨーモーメントが増加してリヤディファレンシャルギヤDrの作動だけでは不足のときには、リヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御により目標ヨーモーメントを発生させる。目標ヨーモーメントが更に増加してリヤディファレンシャルギヤDrの作動および横滑り防止装置VSAによる前輪WFL,WFRのブレーキ制御だけでは不足のときには、リヤディファレンシャルギヤDrおよび横滑り防止装置VSAによる前輪WFL,WFRおよび後輪WRL,WRRのブレーキ制御により目標ヨーモーメントを発生させる。
(もっと読む)
目標充電電力設定装置、方法およびプログラム
【課題】回生ブレーキによって車両を減速させる場合に運転者の意志に応じた回生ブレーキを発生させることは不可能であった。
【解決手段】車両の運転者の減速操作によって目標位置において目標車速となるように前記車両を減速させた場合の車速の推移を示す操作減速車速情報を取得し、バッテリに対して目標充電電力を充電する回生ブレーキによって前記目標位置において前記目標車速となるように前記車両を減速させる場合の車速の推移を示す回生減速車速情報を取得し、前記目標位置において前記目標車速となるように前記車両を減速させる場合の車速が、前記操作減速車速情報が示す車速と前記回生減速車速情報が示す車速との間で推移するように前記車両を減速させるために前記バッテリに対して充電すべき電力を新たな目標充電電力として設定する。
(もっと読む)
車両制御装置
【課題】衝突安全制御による車両の動作を体験できる車両制御装置を提供すること。
【解決手段】車両制御装置20は、自車両と障害物との間の距離および相対速度に基づいて自車両が障害物と衝突する可能性があるか否かを判断し、衝突の可能性がある場合には自車両の走行速度を減速させる衝突安全制御を行う車両制御装置20であって、衝突を回避できるか否かを判断し、衝突回避不可と判断した場合に衝突安全制御を行う通常走行処理手段251と、予め設定された体験走行実行条件を満たすか否かを判断し、体験走行実行条件を満たす場合には、通常走行処理手段251に代えて、衝突安全制御を行う体験走行処理手段252を有する。
(もっと読む)
車両およびその制御方法
【課題】ブレーキの許容温度範囲を超える加熱の抑制と車両の動特性の確保との両立を図る。
【解決手段】車速Vに基づいて要求トルクTr*として設定可能なトルクの最大値の仮の値としての仮最大トルクTrmaxtmpを設定して、車速Vが第1車速V1以下であるときや車速Vが第4車速V4以上であるときにはトルク許容率Kbを値1に設定すると共に車速Vが第1車速V1より高く第4車速V4より低いときにはトルク許容率Kbを値1未満の値krefに設定し(ステップS120)、仮最大トルクTrmaxtmpにトルク許容率Kbを乗じた最大トルクTrmax以下の範囲内で要求トルクTr*を出力して走行するようエンジン22,モータMG1,MG2を制御する(ステップS130〜S200)。
(もっと読む)
車両の協調制御装置
【課題】横滑り防止装置およびトラクションコントロール装置の作動が抑制されたときに協調制御が的確に行う。
【解決手段】スイッチSWが横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動を抑制する位置にあるとき、リヤディファレンシャルギヤDrのヨーモーメント付加要求量および横滑り防止装置VSAのヨーモーメント付加要求量の符号が同一の場合には、絶対値が大きい方からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出し、両ヨーモーメント付加要求量の符号が異なる場合には、横滑り防止装置VSAのヨーモーメント付加要求量からリヤディファレンシャルギヤDrのヨーモーメント制御量を算出する。横滑り防止装置VSAおよびトラクションコントロール装置TCSの作動が抑制された状態でも協調制御による高い精度でヨーモーメント制御量を算出し、単独制御する場合に比べて良好な車両挙動を維持できる。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
221 - 240 / 730
[ Back to top ]