
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
281 - 300 / 730
シリンダ装置
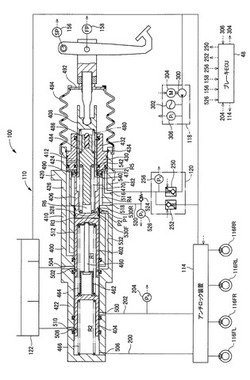
【課題】 実用性の高いシリンダ装置を提供する。
【解決手段】 ブレーキペダル150に加えられた操作力によってブレーキ液を加圧する操作力依存加圧状態と、入力ピストン408の前進とは関係なく、外部高圧源装置118からの圧力に依存してブレーキ液を加圧する高圧源圧依存加圧状態とを選択的に実現するシリンダ装置110であって、それら2つの状態が、入力ピストンと第1加圧ピストン402との間に設けられて操作力に応じた圧力を発生させる反力室R4と、リザーバ122との連通・非連通によって切換えられ、その連通・非連通を、反力室内の圧力によって切換える機構と、反力室の容積によって切換える機構とを備えたことを特徴とする。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
車両用接触回避支援装置

【課題】走行路の路面摩擦特性を精度良く判定することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14の路面摩擦特性判定手段20は、路面摩擦係数μが推定される毎に、路面摩擦係数μに対応する路面摩擦特性のカウント値CNT_sl、CNT_l、CNT_hを積算し、当該積算の結果に応じて前記路面摩擦特性を判定する。
(もっと読む)
車両のアンダーステア抑制装置及びアンダーステア抑制方法
【課題】アンダーステア傾向をより抑制可能な技術を提供することを目的とする。
【解決手段】車両がアンダーステア傾向と判定すると、基準US修正モーメント量Mθの大きさに応じて次の順番に段階的に制御が実行される。すなわち、まず車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更する。次に、車両ロールモーメントの前後配分を後輪1RL、1RR側寄りに変更した状態を維持したまま、後輪1RL、1RRの旋回内輪に制動力を発生若しくは当該旋回内輪に発生している制動力を増大する。更に、上記制動状態を維持したまま、上記後輪1RL、1RR側寄りに変更した車両ロールモーメントの前後配分を前輪側寄りに再変更する。
(もっと読む)
ハイブリッド車両
【課題】故障発生時に速やかに退避走行をさせることができるハイブリッド車両を提供する。
【解決手段】ハイブリッド車両20は、車輪と、車輪を固定するロック機構36と、モータMG2と、エンジン22と、モータMG2およびエンジン22からのトルクを車輪の駆動軸に伝達する動力分割機構30と、モータMG2およびエンジン22を制御するとともに動力分割機構30の分配比を可変に制御する制御ユニット70とを備える。制御ユニット70は、ロック機構36が非作動状態においてモータMG2に異常が発生した場合であって、車速が所定値より大きいときには、モータMG2を非駆動状態としエンジン22からのトルクを車輪に伝達するように動力分割機構30を制御する。
(もっと読む)
車両の制動装置及び制動方法
【課題】自動減速制御への移行時の応答遅れを低減可能な車両の制動制御技術を提供する。
【解決手段】マスタシリンダM/Cからの流体を遮断可能な制動切替弁5,6を備え、制動操作子の操作とは異なる制動条件を満足すると、制動切替弁5,6を開状態に保持し且つ上記流体圧制御回路7を制御する自動制動制御状態にする。その上記自動制動制御状態が終了しても、弁保持解除条件を満足するまで上記制動切替弁5,6の閉状態を継続する。上記弁保持解除条件は、運転者に対し上記制動切替弁5,6の作動音をマスキング可能な音が発生している状態であるマスキング状態と推定しているときである。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置を更に小型化し、しかも、ケーシングに設けられるキャノンコネクタとケーシング内の制御基板との接続作業を簡素化する。
【解決手段】ケーシング11と、ケーシング11に設けられ、ケーシング外部の配線を接続するためのキャノンコネクタ18と、ケーシング内に配設され、キャノンコネクタ18の内側部が接続される配線基板と、ケーシング内に配線基板とは別個に設けられ、ブレーキ制御用の弁を制御可能な制御基板28と、配線基板と制御基板28とを電気的に接続するコネクタと、を備えている。ケーシング内には、各制御基板28を保持可能な保持部39を有する取付枠体35がケーシング11に対して着脱可能に設けられている。
(もっと読む)
作業車両の制御装置
【課題】作業を容易に開始することができる作業車両の制御装置を提供する。
【解決手段】走行ペダルが非操作(PT≦PT1)で回転数Nが所定値N1以下の状態が所定時間継続されると、ブレーキロックと同時にラムシリンダをロックするようにしたので、煩雑なスイッチ操作をすることなくラムシリンダをロックすることができ、作業を容易に開始することができる。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なブレーキアクチュエータの構成にて実現する。
【解決手段】
車輪のホイールシリンダのうちの2つのホイールシリンダを連通接続する液圧的に分離された一対の液圧路と、この一対の液圧路の各々の液圧を別個に且つ連続的に制御するリニア調圧弁と、リニア調圧弁とホイールシリンダとの間に設けられた切換弁とを備え、回避制御中に安定化制御が開始された場合、選択ホイールシリンダを含まない第1液圧路のホイールシリンダに対する回避制御による液圧を、リニア調圧弁によって制御し、選択ホイールシリンダを含む第2液圧路のホイールシリンダに対する安定化制御による液圧を、リニア調圧弁及び切換弁によって制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なシステム構成にて実現する。
【解決手段】
車両の緊急状態を回避する回避制御の目標減速度を演算する回避制御手段と、選択車輪に制動トルクを付与して車両の安定性を確保する安定化制御の目標スリップ速度を演算する安定化制御手段と、実車輪速度を取得する車輪速度取得手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを目標減速度に基づいて制御するとともに、選択車輪に付与する制動トルクを選択車輪の目標スリップ速度、及び、非選択車輪の実車輪速度に基づいて制御する。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。併せて、上記の2つの制御を簡素なブレーキアクチュエータの構成にて実現する。
【解決手段】
ホイールシリンダのうちの2つのホイールシリンダを連通接続する第1液圧路と、第1液圧路に接続する2つのホイールシリンダとは異なる残りの2つのホイールシリンダを連通接続する第2液圧路と、第1及び第2液圧路の制動液圧を調整する第1及び第2調圧手段とを備え、緊急回避制御の実行と前記安定化制御の実行とが同時に行われる場合、緊急状態量取得手段によって取得される緊急状態量に基づいて第1調圧手段を制御するとともに、ステア特性量取得手段によって取得されるステア特性量に基づいて第2調圧手段を制御する。
(もっと読む)
車両の運動制御装置
【課題】
車両の緊急状態(道路からの逸脱、先行車両との衝突等)を回避する回避制御と、車両のステア特性を好適に維持する安定化制御との制御干渉を抑制し、円滑な制動制御を実現できる車両の運動制御装置を提供する。
【解決手段】
車両の緊急状態を回避するために車輪に制動トルクを付与する回避制御を実行するための第1目標量(回避制御の目標量)を演算する回避制御手段と、車両の安定性を確保するために、車輪のうちから選択車輪を決定し、この選択車輪に制動トルクを付与する安定化制御を実行するための第2目標量(安定化制御の目標量)を演算する安定化制御手段とを備え、制動制御手段は、非選択車輪に付与する制動トルクを第1目標量に基づいて制御するとともに、選択車輪に付与する制動トルクを、第1目標量及び前記第2目標量に基づいて制御する。
(もっと読む)
車両の運動制御装置
【課題】自動加圧制御が実行されても運転者のブレーキ操作に対する狙いとする減速度を安定して確保し得る車両の運動制御装置を提供すること。
【解決手段】この装置は、モータM(液圧ポンプ)の駆動制御により原則的に所定の高圧(下限値Pon以上)に調整されるアキュムレータ液圧Paccを利用して作動するハイドロブースタを備えた車両のブレーキ装置に適用される。この装置は、Paccを利用して複数の電磁弁を制御して自動加圧制御(オーバーステア(OS)抑制制御)を実行する。OS抑制制御でのブレーキ液圧の増加勾配は、車両の運動状態(車体スリップ角)に基づいて原則的に決定される。ただし、OS抑制制御開始時点でのPaccが「ハイドロブースタによるブレーキ操作の助勢に必要なPaccの下限値(アシスト限界値Passist)より大きくてPonよりも小さい基準液圧Pref」未満の場合、上記増加勾配が所定の制限値以下に制限される。
(もっと読む)
車両用ブレーキ液圧制御装置の基体
【課題】ブレーキ配管の回り止めを構成するために専用の孔部を形成する必要がなくなり、加工工数を少なくすることができる車両用ブレーキ液圧制御装置の基体を提供することを課題とする。
【解決手段】内部にブレーキ液路Aが形成された基体10であって、上面10d(一面)には、ブレーキ配管40が接続される接続穴11が形成されるとともに、ブレーキ液路Aに通じる孔部12が形成されており、孔部12には、ブレーキ配管40の一部が係合してブレーキ配管40の回り止めを構成する係合部50が形成されていることを特徴としている。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
走行支援装置
【課題】運転者の操作によって推奨速度への速度調整を容易に実施できる走行支援装置を提供することを課題とする。
【解決手段】運転者の操作に応じて自車両の速度を調整可能な自車速調整手段を備える車両に搭載される走行支援装置1であって、自車両の推奨速度を取得する推奨速度取得手段51と、自車両の速度を検出する自車速検出手段12,22と、推奨速度と自車両の速度との偏差に応じて自車速調整手段の操作特性を変更する操作特性変更手段51とを備えることを特徴とし、操作特性変更手段51は、推奨速度と自車両の速度との偏差が大きいほど、自車両の速度が推奨速度に一致する方向に速度変化し易くなるように自車速調整手段の操作特性を変更すると好適である。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
車両の走行安全装置
【課題】自車両が進行方向前方の先行車両に衝突する可能性を低減する。
【解決手段】車両の走行安全装置10は、自車両の進路を予測する自車進路予測部31と、自車両の走行路に交差する交差路を走行する交差車両を検出する交差車両検出部32と、交差車両の進路を予測する交差車進路予測部33と、自車両から所定距離以内の進行方向前方に存在する先行車両を検出する先行車両検出部35と、自車両の進路と交差車両の進路とに基づいて自車両と交差車両との衝突可能性の有無を判定し、先行車両の位置と交差車両の進路とに基づいて交差車両と先行車両との衝突可能性の有無を判定する衝突可能性判定部40と、自車両の走行路と交差路との交差点において、自車両と交差車両との衝突可能性が有ると判定された場合、又は、交差車両と先行車両との衝突可能性が有ると判定された場合に、所定の警報または前記回避制御を実行する車両制御部41とを備える。
(もっと読む)
車両制御装置
【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
281 - 300 / 730
[ Back to top ]