
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
361 - 380 / 730
走行支援装置

【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
制動装置

【課題】本発明は、制動力の要求が増加されてもサービスブレーキを大型化せずに制動力の増加に対応できる制動装置を提供する。
【解決手段】ブレーキフルード圧力分配制御手段(10,74R,74L)により、車速Vaとブレーキフルード圧力Paとに応じて、液圧式ドラムインディスクブレーキシステム(82)の液圧式ディスクブレーキユニット(83R,83L)と液圧式ドラムブレーキユニット(84R,84L)の作動制御を行う。
(もっと読む)
タキシングブレーキ抑制システム
【解決手段】タキシングブレーキ抑制システムは、タキシングブレーキ抑制が作動しているとき所与のブレーキペダル付加に対して2倍のブレーキ力を指令する新たなペダル「フィーリング」ロジックを追加することで、タキシングブレーキ抑制システムの使用によって発生しうるペダル「フィーリング」の不連続問題を解決する。タキシングブレーキ抑制システムは、タキシングブレーキ抑制が作動中か非作動中かに応じて所与のブレーキペダル付加に対して実現される減速度の違いを補償する、二つの異なるブレーキ力−ブレーキペダル付加の曲線に依存している。このようなシステムは、制動中の望ましくない減速バンプ、ヨー効果およびペダルフィーリングの変化を効果的に排除する。前後ブレーキペアのいずれかに任意の非常時タキシングブレーキ抑制条件が存在する場合、前後のブレーキペアの両方でタキシングブレーキ抑制機構が停止される。 (もっと読む)
ディスクブレーキ装置
【課題】本発明は、車速や制動力に拘わらずピストンのブレーキパッドとの接触面を適正に傾斜可能なディスクブレーキ装置を提供する。
【解決手段】キャリパ(64)には、主ピストン(66)及びシリンダ(65d)を一体に有してブレーキロータ(63)の回転方向に回動し主ピストンの端面(66a)をブレーキロータの回転方向で傾斜可能な球面軸受け(65)が遊嵌されており、当該球面軸受けは回動手段(69)により回動させられ、これにより主ピストンの端面が傾斜させられるが、この際、回動可変手段(43R,43L)によって回動手段の回動度合いを可変操作する。
(もっと読む)
電気車制御装置
【課題】ブレーキ指令時の空走時間の短縮と乗り心地の改善とを両立させる。
【解決手段】ブレーキ指令信号の入力時において、フィルタコンデンサ電圧がしきい値電圧未満の場合には十分な回生ブレーキ力が得られるので、回生ブレーキ判定部32は、ハイレベルのダミー許可信号を出力してダミー信号生成部33にダミー信号を出力させる。フィルタコンデンサ電圧がしきい値電圧以上の場合には回生ブレーキ力が不足または失効するのでロウレベルのダミー許可信号を出力してダミー信号生成部33にダミー信号の出力を停止させる。重畳部34は、インバータ制御部29から出力される回生ブレーキ力信号とダミー信号とを重畳しブレーキ力等価信号として出力する。ブレーキ制御装置12は、ブレーキ力指令からブレーキ力等価信号を減算して空気ブレーキ力指令を生成する。
(もっと読む)
車両用ブレーキのトルク補正が可能な制御方法
【課題】車両用のブレーキの制御方法を提供する。
【解決手段】ブレーキの制御方法が、ブレーキの設定値(F)に基づいて、ブレーキアクチュエータの通常の作動設定値(X)を、前記ブレーキの設定値のすべての成分を考りょして決定する段階と、前記ブレーキの設定値(F)と前記ブレーキにより作用された測定されたトルク(Cmes)とに基づいて、前記通常の作動設定値の補正値(Xcorr)を決定する段階であって、前記補正値は前記ブレーキの設定値の低周波数の変動だけを考りょしている段階と、前記補正値を通常の作動設定値に加える段階と、を含んでいる。
(もっと読む)
路面状況判別装置
【課題】路面状況の判別を、既存のセンサを用いる低コストな構成で実現し、多くの自動車に搭載させることを現実的とすることができる路面状況判別装置を提供する。
【解決手段】路面状況判別装置1は、ABS機能に用いられるμセンサ11,11,11,11から出力される路面摩擦係数μに基づき、路面の状況が乾燥か、湿潤(水浸し)か、凍結か又は積雪かを判別する処理を行なう。路面状況判別装置1は、路面摩擦係数μに加え、可視カメラ4及び温度センサ5、又は遠赤外線カメラから出力される情報をも加味して判別処理を行なう。
(もっと読む)
車両の運動支援装置及び車両の運動支援方法
【課題】第1制動部材と第2制動部材との間に存在する液体を除去するための液体除去制御を、前走車から巻き上げられるミスト状の液体を考慮した適切なタイミングで実行させることができる液体量推定装置及び車両の運動支援装置を提供する。
【解決手段】ECUは、降水中である場合に、自車の車体速度VS、ワイパの作動周期FS及び前走車との車間距離Lpを取得する(ステップS13〜S15)。ECUは、車間距離Lp、車体速度VS及び作動周期FSに対応する単位成長量ΔWl、第1ゲインA及び第2ゲインBを設定し、単位成長量ΔWlに各ゲインA,Bを共に乗算し、該乗算結果を実成長量ΔWとする(ステップS16)。ECUは、ブレーキロータの摺接面の水分膜厚Wを更新し(ステップS17)、該更新した水分膜厚Wが膜厚閾値KW以上である場合に、ブレーキロータにブレーキパッドを摺接させる水分除去制御を実行させる(ステップS18)。
(もっと読む)
走行支援装置
【課題】車両を経路誘導するための走行支援制御と、障害物を回避するための走行支援制御とを両立し、運転者にとって、より安全に、違和感を少ない走行支援装置を提供する。
【解決手段】走行支援装置は、自車が進行しようとする経路上へ誘導するための第1のラインと、障害物との接触を回避するための第2のラインを生成する生成部と、 前記第1及び第2のラインのうち、少なくとも1つのラインと前記自車の位置関係に基づいて、当該自車を制御する制御部を備える。
(もっと読む)
車両用運動制御装置
【課題】車両の安定性を確保しながら的確に障害物を回避する。
【解決手段】各タイヤの実際のタイヤ力を検出するタイヤ力検出手段(20)と、障害物との衝突を回避するために各タイヤの目標制動力を設定する制動制御目標制動力設定手段(S105)と、目標制動力の下で各タイヤの制動力を制御する制動制御手段(S110)と、各タイヤの制動力を制御した後に、該制動力の制御に続いて左右のタイヤの制動力の差によって車両を旋回させる回頭制御手段(S112-S122)と、車両の旋回方向を決定する障害物回避方向決定手段(S113,S121,S122)と、回頭制御手段(S112-S122)による各タイヤの制動制御の目標制動力を設定する回頭制御目標制動力設定手段(S118,S115)とを有する。
(もっと読む)
車両の制御装置
【課題】自動変速機が搭載されている車両において、シフトフィーリングを改善することができる車両の制御装置を提供する。
【解決手段】車両は、車両の移動速度の増大を抑制するブレーキを作動させるブレーキアクチュエータ108と、パーキングおよび非パーキングの切換を指示するためのシフトレバー114と、シフトレバー114によって与えられるパーキング指示に応じてパーキングギヤの回転軸を固定するパーキングポールとを含む。パーキングポールには、パーキングギヤの歯とパーキングポールの凸部が当ってしまうような固定が有効に働かない角度が存在する。制御装置は車両が移動してパーキングポールによる固定が有効に働くようになるまでの間はブレーキアクチュエータ108に車両の移動速度の増大を抑制させる。
(もっと読む)
制動制御装置
【課題】ホイールシリンダ液圧の制御精度を向上し得る制動制御装置を提供する。
【解決手段】ブレーキ操作部材に対して操作が行われるとブレーキ操作量検出手段により操作量が検出され、その検出量に応じたホイールシリンダ液圧を各車輪に配設されたホイールシリンダに対して供給するようにポンプがモータにより駆動される。ポンプにより発生された液圧は液圧回路を介してホイールシリンダに供給される。ホイールシリンダ液圧はポンプによってのみ供給されるように構成されている。液圧回路にはポンプから吐出されるブレーキ液をポンプに循環させる循環流路が設けられ、液圧回路のホイールシリンダ側に接続する上流側と下流側との差圧を調整する調圧弁が設けられている。制御手段は、調圧弁を流通するブレーキ液の流量に基づき、差圧が目標値となるように調圧弁への印加電流を制御する。
(もっと読む)
車両の停車監視装置、及び、車両の停車監視装置を備えた車両の停車保持制御装置。
【課題】車両の停車状態と移動状態を精度良く検出して車両の実際の挙動に合致した自然でスムーズな制御を可能とする。
【解決手段】車速センサ2からの車速信号に基づいて、単位時間当たりの車速パルスが設定値以下となって車両が停車したか否か判定し、この判定の結果、車両が停車したと判断した場合は、その時から車速パルス信号の総和ΣPを算出し、該車速パルス信号の総和ΣPが予め設定した判定値Cp以内の場合は車両が停車状態と判定する一方、判定値Cpを越える場合は車両が移動状態と判定する。こうして判定される車両の移動状態及び停車状態を基に、予め設定した作動条件が成立して、且つ、車両停車状態と判定された場合に車両停車保持をスタートさせて所定の制動力を発生させる。一方、車両の停車保持中に車両移動状態を判定した場合は、停車保持制御のフェールセーフ制御へと移行する。
(もっと読む)
ブレーキ制御装置
【課題】液圧回路とホイールシリンダとをつなぐ接続系に弾性部材要素が含まれていても、液圧制御における良好な応答性を確保可能であると共にブレーキフルードの液圧変化による振動を抑制可能なブレーキ制御技術を提供する。
【解決手段】制御弁と、部分的に弾性部材要素としてフレキシブルホース84を含む鋼管82と、ホイールシリンダ圧が目標ホイールシリンダ圧に近づくよう制御弁への通電制御を実行するブレーキECUを備える。フレキシブルホース84の少なくとも一部には、当該フレキシブルホース84の剛性特性を変化させる剛性可変アクチュエータ100が周設され、ブレーキECUは、ホイールシリンダ圧の圧力制御域においてブレーキフルードの流速に応じて剛性可変アクチュエータ100を制御してフレキシブルホース84の剛性特性を変化させる。
(もっと読む)
選択的非線形最適化演算による車輌運転制御方法
【課題】電子制御装置のコンピュータに高負荷をかける非線形最適化演算制御等の評価関数制御を、電子制御装置によるその他の車輌運転制御を損なうことなく、且つ電子制御装置のコンピュータのグレードアップに頼ることなく実現する。
【解決手段】車輌の走行性能に関与する複数のパラメータについて評価関数の演算により得られた値にて時系列的に行う制御を、前記複数のパラメータの少なくとも一つがそれについて設定された閾値の一方の側にあるときのみ行う。
(もっと読む)
車両制動装置の制動感覚をシミュレートするためのシステム
【課題】油圧制動装置と電気制動装置とを備えている車両制動装備のための、ブレーキペダルにおける制動感覚をシミュレートするためのシステムを提供する。
【解決手段】油圧制動装置7、8と電気制動装置9とを備えている。このシステムは、力伝達流体21が入っていて、その中では、油圧ピストン22がマニュアル制動操作部材1に制御されて摺動している、第1チャンバ20を備えており、前記第1チャンバは、第2の二次的なシミュレーションチャンバ4とシミュレーション弁3を介して連通し、同弁の開度によって、力をブレーキペダルにシミュレートすることができるようになっている。
(もっと読む)
車両
【課題】ドアを開いた状態で運転手が不用意にフットブレーキから足を離しても、オートマチック車のクリープ現象や坂道で車両が動き出してしまうのを防止できるよう、安全対策を万全にした車両を提供する。
【解決手段】車両1が停車してドア2が開いている状態では、動力伝達装置9による駆動力の伝達を禁止するとともに、駐車ブレーキ8を作動させる。駐車ブレーキ8を作動させた状態で、ドア2が閉じられ、フットブレーキ5が作動している場合は、駐車ブレーキ8を解除し、動力伝達装置9による駆動力の伝達を許可する。車両1が動いている状態で、ドア2の開閉スイッチが開にされたとき、ドア2が開くことを禁止し、停止を検出したときに、開閉スイッチが一旦閉にされて再び開にされたことを条件にドア2を開くようにした。
(もっと読む)
ブレーキ制御装置
【課題】ストロークセンサに異常が発生したときの制動要求判定への影響を抑制する。
【解決手段】ブレーキ制御装置10は、ストロークセンサ46と、ストップランプスイッチ70と、ストロークセンサ46の異常を判定し、異常であると判定された場合にストップランプスイッチ70の出力に基づいて運転者の制動要求が発生したか否かを判定するブレーキECU200と、を備える。ブレーキECU200は、複数のストロークセンサ46に異常があるか否かを判定し、異常があると判定した場合にはストップランプスイッチ70からの入力を併用して制動要求が発生したか否かを判定してもよい。
(もっと読む)
ブレーキ装置の制御装置
【課題】 ブレーキ装置の制御装置において、助勢制御の終了を所望の適切なタイミングで行うことである。
【解決手段】制御装置は、助勢制御手段による油圧ポンプの駆動中において、所定条件が満足された場合には、その満足された時点において判定用助勢限界圧演算手段(ステップ104)で演算された判定用助勢限界圧を第1判定値として導出し記憶する第1判定値導出記憶手段(ステップ124)と、ブレーキ操作部材の戻しが開始されたか否かを判定する戻し開始判定手段(ステップ110、114)と、を有し、助勢制御手段は、油圧ポンプの駆動中において、戻し開始判定手段がブレーキ操作部材の戻しが開始されたと判定した場合には、第1判定値導出記憶手段で記憶されている第1判定値を判定用助勢限界圧として使用して助勢制御を実行する(ステップ128)。
(もっと読む)
ブレーキ力倍力装置
本発明は、筋力で操作するためのピストンロッド(3)と、電気機械式のアクチュエータ(2)とを備える電気機械式のブレーキ力倍力装置(1)に関する。本発明は、ペダルロッド(3)の筋力が弾性的な伝達部材(8)、例えばばね部材(19)を介して、かつアクチュエータ力が、弾性的な伝達部材(8)とは別に、例えば複数のばね部材(20)及び並列に配置されたダンパ(21)を備える固有の弾性的な伝達部材(13)を介して伝達されることを提案する。その際、制御可能なブレーキ力倍力装置は、倍力装置ボディ及び入力部材の相対変位を表す量に基づいて運転される。本発明に係るブレーキ力倍力装置(1)は、特に操作ストローク、操作速度及び/又は操作加速度に基づいていてよい、広範な範囲で可変の倍力装置特性線の設定を可能にする。異なるモード、例えばスポーツモードへの切換も可能である。 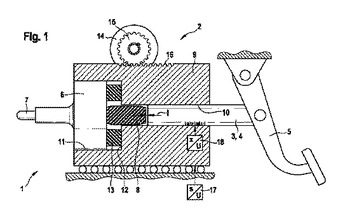 (もっと読む)
(もっと読む)
361 - 380 / 730
[ Back to top ]