
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
301 - 320 / 730
衝突安全装置
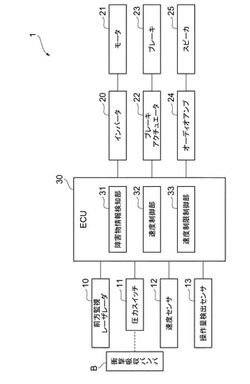
【課題】本発明は、障害物が存在するエリアを走行する場合でも円滑な走行を可能とする衝突安全装置を提供することを課題とする。
【解決手段】障害物と衝突の可能性のある部位Bに衝突吸収構造を有する移動体に搭載される衝突安全装置1であって、移動体の周辺の障害物を検出する障害物検出手段10,31と、障害物検出手段10,31で障害物を検出した場合に減速制御を行う制御手段33とを備え、制御手段33は、減速制御を行うときの速度の制御値を少なくとも移動体の障害物との衝突部位Bの衝撃吸収性能に応じて設定することを特徴とする。
(もっと読む)
走行支援装置

【課題】ドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促すことが可能な走行支援装置を提供する。
【解決手段】自車両の周辺に存在する障害物を検出する前方監視レーザレーダ13と、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出したときに、自車両の車速Vを最高速度制限値Vmaxr以下にする速度制御を行うECU30とを備えた速度制御装置1aにおいて、ECU30は、前方監視レーザレーダ13が自車両の周辺に存在する障害物を検出した後に障害物を検出しなくなったときでも、自車両のドライバーが自車両を最高速度制限値Vmaxr以下する減速操作を自発的に行なうまでは速度制御を行ない、減速操作を自発的に行なったときに速度制御を解除する。これによりドライバーが装置自体の走行制御に過度に依存することを避け、自発的な操作を促す。
(もっと読む)
ディスクブレーキ用制振装置
【課題】外乱が発生したとしても、最適に振動を抑制でき、ブレーキ鳴きを抑制できるディスクブレーキ用制振装置を提供する。
【解決手段】電圧印加によって剛性が変動する剛性変化部材7を用い、剛性変化部材7の剛性変動によってピストン5とブレーキパッド6との間の剛性やキャリパ4の爪部4bとブレーキパッド6との間の剛性を変化させる。そして、剛性変化部材7に電圧を印加した状態で振動を検知し、その振動に基づいて、剛性変化部材7に印加される電圧を変化させる。これにより、外乱が発生して鳴き発生領域が変化したとしても、常にブレーキ鳴きによる振動を検出して剛性変化部材7に印加する電圧を最適電圧に調整しているため、外乱が発生しても最適に振動を抑制でき、ブレーキ鳴きを抑制することが可能となる。
(もっと読む)
車両の制御装置
【課題】車両への荷重入力により制動手段に不具合が生じたときであっても、ブレーキ油の漏れを防止すると共に、車両に適切な制動力を付与することができる車両の制御装置を提供すること。
【解決手段】加速度検出手段(第1,第2前後Gセンサ、第1,第2左右Gセンサ)11〜14により検出された加速度が予め定めた閾値を超えると共に、方向変更検出手段(ヨーレートセンサ)15により車両2の進行方向の変更が検出されたとき、制動手段20を作動して車輪FL,FR,RL,RRごとに制動力を付与することで車両2を減速させる車両挙動制御手段(図3)を備えた車両の制御装置であって、車両挙動制御手段(図3)は、制動手段20が作動中に、ブレーキ配管26a,26b内の圧力低下を検出したとき、車両2に作用する加速度方向を判定する加速度方向判定手段(ステップS6,図4A及び図4B)により得られた加速度入力方向に位置する車輪に対応したブレーキバルブを作動してブレーキ油の流動を遮断する。
(もっと読む)
車両制御装置
【課題】運転者に与える違和感を抑制しつつ、目標値に実際の項目を近づけられる車両制御装置を提供すること。
【解決手段】走行環境あるいは走行条件の少なくとも一方に基づいて運転者に加わる加速度が変化する車両運動に係る項目(加速度)の目標値101を設定する目標値設定手段と、運転者の要求値102を設定する要求値設定手段と、対数値で比較したときの要求値との差が第一の範囲内となる項目の範囲である所定範囲A、および、対数値の変化速度で比較したときの要求値との差が第二の範囲内となる項目の変化速度の範囲である所定変化速度範囲をそれぞれ設定する範囲設定手段と、所定範囲内で項目を目標値に近づけ、かつ、項目の変化速度が所定変化速度範囲内となるように項目の指令値105を設定する指令値設定手段と、指令値に基づいて車両を制御する制御手段とを備え、第二の範囲は、要求値の変化速度に応じて可変に設定される。
(もっと読む)
ブレーキ制御装置
【課題】信号機と信号機の停止線との距離に対応して、より適切に補助的な制動力を自車両に付与することが可能なブレーキ制御装置を提供する。
【解決手段】信号機401と信号機401の停止線402との距離Dを取得する通信装置104と、自車両のドライバーのブレーキ操作による制動力に対して、補助的な制動力を付与するブレーキアクチュエータ131とを備えた運転支援装置100において、自車両が信号機401に接近するときに、ブレーキアクチュエータ131は、通信装置104が取得した信号機401と信号機401の停止線402との距離Dに基づいて、付与する補助的な制動力を変更するため、信号機401と信号機401の停止線402との距離Dに対応して、より適切な大きさの制動力を自車両に付与することが可能となる。
(もっと読む)
制動シミュレーション装置
【課題】ABS制御ユニットの制御パラメータであるスリップ率を容易に設定変更を可能とする制動シミュレーション装置を提供する。
【解決手段】車両の運動を表現する車両モデルと、車両モデルとの情報の受渡しによりタイヤの運動を表現するタイヤモデルとを有するソフトウェアと、車両モデルと情報の受渡しを行う油圧系部品と、車両モデルからの情報に応じて油圧系部品を制御するABS制御ユニットとを有するハードウェアとを備え、車両モデルが有する情報のうち車両モデルから出力される車体速度と車輪回転速度とに応じて補正した補正車輪回転速度をABS制御ユニットに供給する補正手段をさらに備え、補正手段が車体速度と車輪回転速度に基づいて算出されるスリップ率をデータマップにより補正して補正スリップ率を求め、この補正スリップ率に基づいて補正車輪回転速度を算出して、ABS制御ユニットに出力するようにした。
(もっと読む)
ブレーキペダルおよび液圧ブレーキブースタから切り離されたマスタシリンダを備えるブレーキシステム
ブレーキペダルおよび液圧ブレーキブースタ(200)から切り離されたマスタシリンダ(100)を有するブレーキシステムであって、
マスタシリンダ(100)のピストン(110)の後部が内部に挿入され、高圧ユニット(300)により制御された方法で供給されるブーストチャンバ(206)であって、高圧ユニット(300)が、指令に応じて、マスタシリンダ(100)のピストン(110)に対して作用するために、高圧下にあるブレーキ液をブーストチャンバに供給する、ブーストチャンバ(206)と
ブレーキペダルの制御ロッド(230)に連結されたアクチュエータピストン(220)を受けるアクチュエータチャンバ(209)とを備えるシステム。
制御された液圧リンク(320、321)は、ブーストチャンバ(206)とアクチュエータチャンバ(209)を連結させ、さらなる制御された液圧リンク(310、311)は、アクチュエータチャンバ(209)をブレーキシミュレータ(270)のチャンバに連結させる。  (もっと読む)
(もっと読む)
回生制動を持つ車両の独立制動及び操縦性の制御方法及びシステム
【課題】エネルギー回収と車両操縦性とを最適化する。
【解決手段】当初回生制動を行なう車両における操縦性を維持するために、前後の制動トルクを監視そして動的に調整する、フィードバック制御アルゴリズムを用いる、制御が提供される。単比例・積分・導関数フィードバック制御器を用いることが出来る。制御器46は、少なくとも一つの実際の車両操縦性値と少なくとも一つの所定の操縦性目標値とに基づき、様々な割合で、各車輪42,64の非回生制動を独立して、そして回生制動を、選択的に作動させるために、車輪速、横加速度、ヨーレート及びブレーキ位置、を監視することが出来る。操縦性要素が、所定の縦スリップ率、スリップ角又はヨーレートの比較を含むことが出来る。後輪駆動構成については、非回生制動を、旋回外側のフロント・アクスル68の車輪にのみ行い、前輪駆動構成については、非回生制動を、旋回内側のリア・アクスルの車輪にのみ行なう。
(もっと読む)
車両駆動システムの制御装置
【課題】エンジンと第1及び第2のMG(モータジェネレータ)を搭載したハイブリッド車において、第1のMG用のインバータの異常が発生して退避走行モード(第2のMGの動力で走行するモード)に移行したときに、二次故障の発生を防止できるようにする。
【解決手段】第1のMG12用のインバータ22の異常が発生して退避走行モードに移行したときに、遊星ギヤ機構16のピニオンギヤの回転速度が制限値を越えないようにエンジン回転速度を制御する過回転防止制御を実行する。この過回転防止制御により、車輪14側に連結されたリングギヤとエンジン11側に連結されたキャリアとの回転速度差を許容範囲内に維持して、ピニオンギヤの回転速度を制限値以下に維持する。これにより、第1のMG12用のインバータ22の異常が発生して退避走行モードに移行したときに、ピニオンギヤが焼き付いて遊星ギヤ機構16が故障する二次故障の発生を防止する。
(もっと読む)
車両
【課題】車両において、最適な回生制動方法を選択しエネルギ効率を向上させる。
【解決手段】減速モードとして、ブレーキペダル操作により減速する第1の減速モードと、アクセルペダルおよびブレーキペダルの両者をオフした惰性走行状態により減速する第2の減速モードとを有する車両100であって、回転電機MG1,MG2と、蓄電装置16と、制御装置30とを備え、制御装置30は、車両100の運転状態および走行状態に基づいて、第1の減速モードにおける第1の回生電力と、第2の減速モードにおける第2の回生電力とを予測し、上記の第1および第2の回生電力の比較に基づいて、第1および第2の減速モードのいずれか一方の選択を促すように車両乗員に通知する。
(もっと読む)
ブレーキ装置の制御方法および装置
【課題】電気操作式ブレーキ装置の適切な制御により運転の容易性および乗り心地を改善する。
【解決手段】車輪ブレーキの電気操作式設定要素がブレーキペダルの操作から測定されたドライバのブレーキ希望の関数として制御され、ブレーキ信号の少なくとも1つの操作量が測定され、この操作量からドライバのブレーキ希望が導かれるブレーキ装置の制御方法において、少なくとも1つの操作量からドライバのブレーキ希望を導くとき、操作量の変化方向が考慮され、ブレーキ希望が操作量およびヒステリシス部分値から形成され操作量の変化方向が反転したとき、ヒステリシス部分値が、操作量との間で単調関数となるように変化し、前記単調関数が所定の勾配を有する直線である。
(もっと読む)
連続常用制動機を統合された制動システム
本発明は、車両(10)の制動システムの制御方法であって、車両が少なくとも1つの機関(12)、常用制動機(20)及び連続常用制動機(22)を持ち、連続常用制動機(22)の制動作用を求めるために、
a)車両(10)の少なくとも加速段階中に、差滑り−駆動力−相関量(FK)が求められ、
b)少なくとも制動操作段階中に、連続常用制動機(22)により発生される制動力を示す連続制動力量(FDB)が、制動の際生じる差滑り(DS)、差滑り−駆動力−相関量(FK)、及び車両(10)の常用制動機(20)により発生される制動力成分(FV,FH)を使用して求められる。
(もっと読む)
ブレーキ装置
【課題】シューとドラムの接触位置を精度良く検出し、ブレーキの応答性を向上させる。
【解決手段】ブレーキ装置は、シューをドラムに押圧する電動アクチュエータを備えている。電動アクチュエータが作動するとシューがドラムとのクリアランスを詰める方向に移動する。この場合、電動アクチュエータは、クリアランスを詰めている間はシューを移動させるだけの力を付与すればよいが、シューとドラムが接触するとシューを移動させる力にシューをドラムに押圧する押圧力を加味して電動アクチュエータを駆動させる必要がある。このため、摩擦部材と回転部材が接触すると、摩擦部材の移動量に対する電動アクチュエータの供給電流の電流勾配が急激に増加する。この急激に増加した時点シューの接触位置と検出して、この接触位置に基づいて電動アクチュエータを駆動制御することでブレーキの応答性を向上することができる。
(もっと読む)
車両用運転支援装置
【課題】所定以上の制動力が発生した場合に適切なタイミングでブレーキランプを点灯させることができる車両用運転支援装置を提供する。
【解決手段】PCU5は、自動制動制御による制御液圧が閾値以上である場合のみならず、マスタシリンダ液圧Pmが設定値P0以上である場合にも、リレースイッチ56を副配線55側にON接続し、ブレーキペダルスイッチ54に依存することなくブレーキランプ52を点灯させる。これにより、例えば、自動制動制御による液圧がマスタシリンダ27内に残留している状態でドライバがブレーキペダル25を操作した場合等のように、その残圧により、通常の踏み込み操作によってマスタシリンダ27内に発生する液圧よりも高い液圧が発生した場合においても、適切なタイミングでブレーキランプ52を点灯させることができる。
(もっと読む)
車両制御システム及び安全確認判定装置
【課題】ドライバモニタカメラから取得するドライバの視点方向と車外カメラから取得する障害物方向とを照合する際に、ドライバの視点方向の情報を安定化して、ドライバが障害物を認識していないとする誤判定を防止する車両制御システムを提供する。
【解決手段】車両制御システム10は、ドライバの視点方向を所定周期で検出するドライバモニタカメラ34fと、角度座標上でのドライバの視点移動速度を検出する視点クラスタ処理部31bと、ドライバの視点の注視期間を検出する視点同定処理部31cと、視点移動速度と注視期間に基づいて算出されるドライバの視野範囲に、車外カメラ32cで検出された障害物方向が含まれるか否かを判定し、ドライバの視野範囲に障害物方向が含まれないと判定された場合に車両制御の実行が可能な安全確認判定部31とを備える。
(もっと読む)
ブレーキ制御装置
【課題】増圧制御弁の個体差による昇圧性能バラツキに起因して、所望の制動力が得られなくなることを抑制する。
【解決手段】高μ路側の前輪FR、FLと対応する増圧制御弁17、37にて第1差圧Plowを第1時間Tlow継続し、第2差圧Phighを第2時間Thigh継続することを繰り返すことで、高μ路側の車輪のW/C圧を緩増圧する。したがって、W/C圧の昇圧性能のばらつきを抑制することができ、左右前輪FR、FLのW/C圧の差圧を一定範囲に抑えることが可能になる。これにより、車両に加わるヨートルクを抑制でき、スピンを防止することが可能になる。そして、第1差圧Plowを一定値にせずに、段階的に徐々に低下させていくことで、第1、第3増圧制御弁17、37の個体差に起因した発生させられる差圧のばらつきを緩増圧中に更に低減することができる。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両制御装置
【課題】誤操作によってアクセルペダルが戻された場合であってもスムーズな発進を可能とする車両制御装置を提供する。
【解決手段】電動パーキングブレーキ装置の解除条件が成立しているか否かを判定する解除条件判定手段と、車両が停止している路面の傾斜を検出する傾斜検出手段と、前記路面の傾斜角度に応じた推定走行抵抗を算出する推定抵抗算出手段と、車両の駆動力を算出する駆動力算出手段と、アクセルペダルからの入力に基づいてエンジンの出力を制御するエンジン出力制御手段とを備える車両制御装置であって、エンジン出力制御手段は、解除条件判定手段により電動パーキングブレーキの解除条件成立が判定されかつ駆動力が推定走行抵抗以上となった後に、アクセルペダルからの入力に関わらずエンジンの回転数が所定の下限エンジン回転数以上となるようにエンジンの出力をフィードバック制御する構成とする。
(もっと読む)
車両の運動制御装置
【課題】
複数の状態量間の位相差を補償し、車両のヨーイング運動、及び/又は、ローリング運動における安定性を維持し得る車両の運動制御装置を提供する。
【解決手段】
車両の操舵角速度を取得する操舵角速度取得手段と、操舵角速度に基づいて最大操舵角速度を演算する最大操舵角速度演算手段と、最大操舵角速度に基づいて基準旋回状態量を決定する決定手段と、車両の実旋回状態量を取得する実旋回状態量取得手段と、基準旋回状態量、及び、実旋回状態量に基づいて制動トルクを制御する制御手段とを備える。制御手段は、実横加速度が基準横加速度を超えたときに、車輪への制動トルク付与を行う。
(もっと読む)
301 - 320 / 730
[ Back to top ]