
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
261 - 280 / 730
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
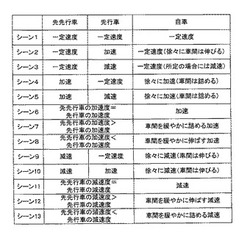
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
路外逸脱防止装置

【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
車両用ブレーキ圧制御装置
【課題】旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、左右輪の許容差圧を設定する許容差圧設定手段と、許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、高摩擦側ブレーキ圧を目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段を備える。許容差圧設定手段は、車体速度(第1マップM1)に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧は常に0よりも大きな値になっている。
(もっと読む)
トラクション制御装置
【課題】トラクション制御によって駆動輪の制御を行いながらも、必要なときには適宜、トラクション制御が制限でき運転者の意思どおりにエンジン駆動力を車両の駆動輪に付与できる安全性の高いトラクション制御装置を提供する。
【解決手段】車両の駆動源から駆動輪FR、FLに伝達される駆動力を制限するトラクション制御装置において、駆動源から出力される駆動力を制御するために操作されるアクセルの操作量を検知するアクセル操作量検出手段64と、アクセル操作量検出手段64からの出力に基づいてアクセル操作の振動状態を演算するアクセル振動演算手段65と、アクセル振動演算手段65により演算されたアクセル操作の振動状態が大きいほどトラクション制御が介入しにくくなるようにトラクション制御の制御内容を変更するトラクション制御変更手段66と、を備える。
(もっと読む)
ブレーキ制御システム
【課題】ブレーキ操作量検出装置を使用する複数の制御装置を有するブレーキ制御システムにおいて、ブレーキ操作量検出装置を1つにするブレーキ制御システムを提供する。
【解決手段】ブレーキ操作量に基づいて、マスタシリンダ圧を制御するマスタシリンダ圧制御装置と、各車輪のホイールシリンダ圧を制御するホイールシリンダ圧制御装置と、マスタシリンダ圧を算出するための信号を検出するマスタシリンダ圧検出装置と、を有し、マスタシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてマスタシリンダ圧を制御し、ホイールシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてホイールシリンダ圧を制御するブレーキ制御システム。
(もっと読む)
車両用停車制御装置
【課題】 車両停車時に停車の要否を判定し、確実に停車を維持できる停車維持制御を行うことが可能な車両用停車制御装置を提供する。
【解決手段】 自動的に停車状態を維持している場合に、ドライバにより停車維持終了操作が行われた場合(ステップS31)、その際にドライバによってブレーキ操作が行われていない限り(ステップS33)、停車維持制御を解除してオフにする(ステップS35)制御を実行しないことで、解除時においても停車状態を確実に維持する。
(もっと読む)
車両運動制御装置
【課題】車両が旋回時にアンダーステア状態になっても、高い応答性でアンダーステアを
解消する車両運動制御装置を提供する。
【解決手段】車両のアンダーステア状態を検出するアンダーステア検出手段27と、アン
ダーステア検出手段によりアンダーステア状態が検出されたときに、 車両の旋回外
輪に対するブレーキ力の付与を開始する外輪ブレーキ力付与開始手段26と、外輪ブレー
キ力付与開始手段による旋回外輪へのブレーキ力の付与の開始後における旋回外向きのモ
ーメントの増加を検出する外向モーメント増加検出手段26と、外向モーメント増加検出
手段により旋回外向きのモーメントの増加が検出されたときに、外輪ブレーキ力付与開始
手段により開始された旋回外輪へのブレーキ力の付与を停止する外輪ブレーキ力付与停止
手段26と、を備えている。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
ナビゲーション装置
【課題】車体をカーブで走行させる際に、カーブの環境の変化や運転者の意識に対応して適正に報知を行うナビゲーション装置を構成する。
【解決手段】車体がカーブに接近した際に、カーブの半径に基づいてカーブでの適正走行速度を算出し、車体の走行速度が適正走行速度より高速である場合に、減速度設定手段28が車体の走行時における基準減速度を算出し、基準減速度が閾値を超えることを報知出力手段30が判別したタイミングで左振動体VLと右振動体VRを同時に駆動する等の報知を行う。
(もっと読む)
牽引車輌の制御装置
【課題】センサ数の増大を抑制しながら牽引車両の挙動の安定化が可能な制御装置を構成する。
【解決手段】制御装置の安定化制御部23が、トラクタに作用する横加速度GYと、ヨーレートYrと、走行速度Vと、操舵角δとに基づいてヒッチ点に作用するヒッチ点横力Fhを推定するヒッチ点横力推定部23Cを備えている。この安定化制御部23は、推定されたヒッチ点横力Fhと逆方向となる相殺ヨーモーメントを演算する相殺ヨーモーメント演算部23Dと、この相殺ヨーモーメントを出力するヨーモーメント出力部23Eとを備えている。このヨーモーメント出力部23Eはトラクタの車輪の左右の一方に制動力を作用させる。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
車両制御装置
【課題】ドライバの意図に沿った走行状態を実現する車両制御装置を提供する。
【解決手段】先行車に対して追従制御を行う車間距離制御または設定された速度に収束するように定速走行を行う定速走行制御を備えた車両制御装置において、ドライバのブレーキ操作状態を検出するブレーキ操作状態検出装置と、車間距離制御又は定速走行制御を実施中にブレーキ操作が検出されると、ブレーキ操作状態に応じた減速を行う減速制御部と、ブレーキ操作の終了が検出されると加速方向の制御をキャンセルする加速制御制限部とを有するコントロールユニットを備えた。
(もっと読む)
車両制御装置
【課題】 車両挙動変化に対するショックアブソーバの減衰力特性の制御の遅れを抑制することができる車両制御装置を提供すること。
【解決手段】 ホイルシリンダ液圧が高くなるほど減衰力特性をハードに設定するようにした。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中に運転手によるブレーキ操作が変化しても、その変化に適切に対応した制動制御を実行できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中にダブルブレーキが検出された場合(第6タイミングt16)、車輪に対応して設けられたホイールシリンダ内のWC圧の増圧速度が速くなるように、ホイールシリンダ内のWC圧を増圧させる際に開動作する増圧弁に対する指令電流値Idを調整する。
(もっと読む)
車両制御装置
【課題】ドライバに違和感を与えることなくドライバのペダル操作負担を軽減可能な車両制御装置を提供する。
【解決手段】ドライバのアクセル操作状態を検出するアクセル操作状態検出部と、自車両の速度を減速させる減速装置と、自車両の速度を算出する車体速算出部と、検出されたアクセル操作状態と算出された車体速に基づいて目標車体速を設定し、目標車体速となるように制御する速度制御部を有するコントロールユニットと、を備えた。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
ブレーキ制御装置
【課題】フェールセーフ時におけるブレーキフィーリングの低下を抑える。
【解決手段】ブレーキ制御装置は、液圧回路を介したブレーキ液の供給によりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するブレーキ制御装置であって、マスタシリンダと、ストロークシミュレータと、シミュレータカット弁SCSSと、シミュレータカット弁SCSSの開閉を制御する第1制御部210、第2制御部220と、を備える。第1制御部210および第2制御部220は、通常時は第1制御部210がシミュレータカット弁SCSSの開閉を制御し、第1制御部210に異常が発生した場合に、第2制御部220がシミュレータカット弁SCSSの開閉制御を継続する。
(もっと読む)
シリンダ装置
【課題】 実用性の高いシリンダ装置を提供する。
【解決手段】 ブレーキペダル150に加えられた操作力によってブレーキ液を加圧する操作力依存加圧状態と、入力ピストン408の前進とは関係なく、外部高圧源装置118からの圧力に依存してブレーキ液を加圧する高圧源圧依存加圧状態とを選択的に実現するシリンダ装置110であって、それら2つの状態が、入力ピストンと第1加圧ピストン402との間に設けられて操作力に応じた圧力を発生させる反力室R4と、リザーバ122との連通・非連通によって切換えられ、その連通・非連通を、反力室内の圧力によって切換える機構と、反力室の容積によって切換える機構とを備えたことを特徴とする。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
261 - 280 / 730
[ Back to top ]