
Fターム[3D246HA02]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931)
Fターム[3D246HA02]の下位に属するFターム
ストローク (854)
踏力 (285)
操作速度、操作加速度 (62)
Fターム[3D246HA02]に分類される特許
61 - 80 / 730
車両の運転支援制御装置
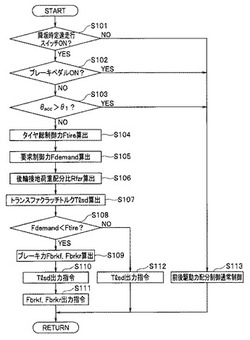
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
車両の運転支援装置

【課題】ドライバの意思を尊重しつつ、衝突防止制御を有効に機能させることができる車両の運転支援装置を提供する。
【解決手段】走行制御ユニット5は、制動制御中にドライバによるブレーキペダルの踏込操作を検出した場合には、自車両1と制御対象との衝突の可能性があることをドライバが認識している可能性が高いと判断して制動制御を中断する。これにより、ドライバの意思に反する不要な制動制御の介入を防止することができる。その一方で、制御対象との衝突の可能性が高い状況下でドライバによるブレーキペダルの踏込量が解放側に設定速度以上で変化した場合には、一旦中断した制動制御を再開する。これにより、衝突防止制御を有効に機能させることができる。
(もっと読む)
車両ずり下がり状態判定装置およびそれを備えた車両制御装置
【課題】的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置を提供する。
【解決手段】車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が加速方向となったときに、車両ずり下がり状態と判定する。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
(もっと読む)
車両制御装置
【課題】低コストで構成可能でありながら適切なタイミングで衝突安全装置を動作可能とする車両制御装置を提供する。
【解決手段】自車両と物体との衝突の危険性を低減するべく車両を制御する車両制御装置であって、物体を検出する物体検出手段と、物体と自車両との衝突の危険性が高いか否か判定する衝突判定手段と、衝突判定手段により衝突の危険性が高いと判定された場合、衝突の危険性を低減するための衝突安全装置を作動させる衝突安全装置制御手段と、自車両の車体のピッチ角の経時変化量をピッチ角変化量として算出するピッチ角変化量算出手段と、ピッチ角変化量に基づいて衝突安全装置の動作を抑制または停止する動作抑制手段とを備える、車両制御装置である。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】緊急制動操作されていない場合に、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御が不用意に開始されることを抑制することができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVに外乱に基づく振動成分が含まれるか否かを判定する(ステップS74,S76)。そして、ブレーキ用ECUは、含まれると判定した場合に(ステップS74又はステップS76がYES)、第1の減速判定値DV_stを、含まれないと判定した場合よりも大きな値に補正し(ステップS79)、車体減速度DVが第1の減速判定値DV_stを超えると共に、Gセンサ値Gが第2の減速判定値G_stを超える場合に(ステップS84,S89:YES)、補助制御を開始する。
(もっと読む)
電気自動車
【課題】 左右の車輪を個別に駆動する複数のモータを備えた電気自動車において、1輪分のモータ異常が発生した場合に、停止させることなく、車両姿勢の安定化を図って走行を可能とする。
【解決手段】 各モータ6の異常を検出するモータ異常検出手段37と、片側異常時対応制御手段38とを設ける。片側異常時対応制御手段38は、モータ異常検出手段37により、車両の同じ前後方向位置にある左右のいずれか一方の車輪2,3のモータ6にモータ停止以外の異常が検出された場合に、同じ前後方向位置にある他方の車輪2,3のモータ6を、異常の検出されたモータ6の動作状態と同じ動作状態に近づくように制御する。この制御は、他方のモータ6のトルクを強制的に減じる制御、回生ブレーキとして作用させる制御、他方の車輪2,3のブレーキ作動の制御等とする。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
クリープ車速制御装置
【課題】運転者による運転操作を複雑化することなく、クリープ速度を所望の速度に容易に調整することが可能なクリープ車速制御装置を提供すること。
【解決手段】ブレーキペダルの踏込量に応じてクリープ車速の目標車速を定める。そして、車両のクリープ車速が目標車速となるように、原動機16によって発生される駆動トルク及びブレーキ装置26によって発生される制動トルクを制御する。このため、車両の運転者は、ブレーキペダルの踏込操作により、車両のクリープ車速を、容易に所望の速度に調整することができ、さらに、その増減の調整も容易となる。
(もっと読む)
車両用制動力制御装置
【課題】簡易な構成でブレーキアシスト制御を実現させること。
【解決手段】運転者のブレーキ操作による制動力の不足分を補うブレーキアシスト制御の実行が可能な制動システムと、運転者のブレーキ操作に伴い作動してオン信号を出力するブレーキスイッチ12と、運転者のブレーキペダル10に対するペダル踏力が所定値を超えたときにオン信号を出力する踏力スイッチ11と、を備え、ブレーキスイッチ12のオン信号が検出されてから踏力スイッチ11のオン信号が検出されるまでの時間に基づいて前記ブレーキアシスト制御の実行要否判定を行うこと。
(もっと読む)
車両用制動装置
【課題】マスタシリンダ圧力を検出する圧力センサの零点補正値を適切に更新することができる車両用制動装置を提供する。
【解決手段】マスタシリンダ23により調整された液圧の圧力に対応する出力値を検出する油圧センサ40と、マスタシリンダ23の圧力が0となる油圧センサ40の出力値を零点補正値として記憶し、該零点補正値に基づいて油圧センサ40の出力値を補正してマスタシリンダ圧力を算出するマスタシリンダ圧力算出部52と、を備える車両用制動装置20において、油圧センサ40により検出された出力値が、マスタシリンダ圧力算出部52に記憶されている零点補正値より小さい場合に、該出力値を新たな零点補正値として設定し、零点補正値を更新する零点補正値更新部54を備える。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
自動二輪車用ブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
ブレーキ操作装置およびブレーキ液圧制御装置
【課題】ブレーキペダルの操作方向の変化を的確に取得する。
【解決手段】マスタシリンダのヒステリシス特性が大きい場合には、ブレーキペダルのストロークの変化がマスタシリンダ液圧の変化に遅れて変化する。そのため、時間t2において、マスタ圧対応目標減速度が増加傾向から減少傾向に変化した場合には、ストローク対応目標減速度が変化しなくても、ブレーキペダルの操作方向が踏込み方向から戻し方向に切り換わったと決定される。このように、マスタ圧対応目標減速度とストローク対応目標減速度とのいずれか一方が変化しないで他方が変化した場合に、ブレーキペダルの操作方向が変化したと取得されるため、ブレーキペダルの操作方向の変化を的確に取得することが可能となる。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
61 - 80 / 730
[ Back to top ]