
Fターム[3D246HA03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931) | ストローク (854)
Fターム[3D246HA03]に分類される特許
321 - 340 / 854
自動制動装置
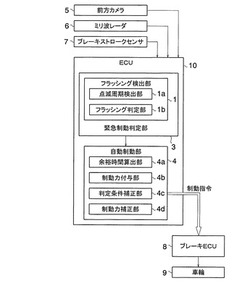
【課題】自動制動装置に関し、簡素な構成で、先行車両の急制動時に適切に自動制動制御を実施する。
【解決手段】先行車両の灯火装置の画像を撮影する撮像手段5と、撮像手段5で撮影された該画像に基づき、該先行車両における緊急制動操作の有無を判定する緊急制動判定手段3と、緊急制動判定手段3において該緊急制動操作であると判定された場合に、自車両の自動制動を実施する自動制動手段4とを備える。
該緊急制動判定手段3において、該灯火装置の点滅周期を検出する点滅周期検出手段1aと、点滅周期検出手段1aで検出された該点滅周期に基づき、該灯火装置におけるフラッシングの有無を判定するフラッシング判定手段1bとをさらに設ける。
(もっと読む)
ブレーキ制御装置

【課題】電気エネルギーの回収効率を高めることのできるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、制御手段は、回生制動力の制限値を設定し、設定した制限値と目標総制動力とにもとづいて目標回生制動力と目標液圧制動力とを決定して、回生ブレーキユニット10と液圧ブレーキユニット20とを協調制御する。制御手段は、液圧が所定値より大きいときは、所定値以下のときと比較して、回生制動力の制限値を大きくする。
(もっと読む)
車両のパークロック装置
【課題】左右輪を個々のパークロック機構により回転拘束するパークロック装置のパークロック解除に際し、左右輪のパークロック解除が同時に完了するようになす。
【解決手段】左右パークロック負荷PLL(L),PLL(R)の大小関係から、左パークロック解除所要時間TPL(L)が右パークロック解除所要時間TPL(R)よりも長い場合、早期にパークロック解除を完了する側の右綸パークロック解除を遅延させる。この遅延は、一点鎖線で示すごとき解除速度低下、または二点鎖線で示すごとき解除開始タイミングの遅れにより、右綸パークロック解除が左綸パークロック解除と同じ瞬時t4に完了するようなものとする。これにより左右輪のパークロック解除が同時に完了することとなり、左右輪のパークロック解除完了タイミングがずれて運転者の予期しない車両挙動が発生する問題を回避し得る。
(もっと読む)
ブレーキ液圧制御装置
【課題】簡単な構成により、リニアソレノイドバルブの自励振動による作動音の発生を低減するブレーキ液圧制御装置の提供。
【解決手段】マスタシリンダ12とホイルシリンダWC1、WC2との間にカット弁41、42を設け、正常作動時に、これらによりマスタシリンダ12とホイルシリンダWC1、WC2との間を遮断し、液圧ポンプ32によって、マスタシリンダリザーバ11内のブレーキ液を吸引し、増圧電磁弁43〜46を介してホイルシリンダWC1〜WC4に供給し、減圧電磁弁47〜50を介して、ホイルシリンダWC1〜WC4内のブレーキ液圧をリザーバ11へと戻し、ホイルシリンダWC1〜WC4内のブレーキ液圧を制御するブレーキ液圧制御装置において、減圧電磁弁47〜50とリザーバ11を接続するリリーフ路65〜68または還流路69に、各減圧電磁弁47〜50間で圧力の脈動の伝播を低減する脈動伝播低減手段を設けた。
(もっと読む)
車両制御装置
【課題】接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行う。
【解決手段】接触回避支援制御部は、VSA制御部によるVSA制御がオフ状態になっている場合は、オン状態になっている場合のタイミングよりも早いタイミングで接触回避支援、例えば、警報を発生し、該警報により操向ハンドルの操作を促すことで、確実に接触回避支援を行うことができ、結果として、接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行うことができる。
(もっと読む)
ブレーキ制御装置
【課題】フェールセーフ時のブレーキフィーリングおよび車両姿勢の制御性の低下を抑える。
【解決手段】ブレーキ制御装置は、ブレーキ液を供給してホイールシリンダに液圧を発生させる複数の配管系統と、複数の配管系統によるホイールシリンダへのブレーキ液の供給を制御する制御部と、を備える。複数の配管系統は、それぞれを流れるブレーキ液に関して互いに独立しており、制御部は、配管系統に異常が発生した場合に、ホイールシリンダの液圧が目標液圧を上回っている場合には異常配管系統の制御を停止し、ホイールシリンダの液圧が目標液圧を下回っている場合には異常配管系統の制御を継続する。
(もっと読む)
シリンダ装置
【課題】 実用性の高いシリンダ装置を提供する。
【解決手段】 ブレーキペダル150に加えられた操作力によってブレーキ液を加圧する操作力依存加圧状態と、入力ピストン406の前進とは関係なく、外部高圧源装置118からの圧力に依存してブレーキ液を加圧する高圧源圧依存加圧状態とを選択的に実現するシリンダ装置110であって、第1加圧ピストン402の有底穴に後方から入力ピストンが嵌入され、入力ピストンの前方にピストン間室R6が区画されるとともに、第1加圧ピストンの鍔部430の後方に外部高圧源装置からの圧力が入力される入力室R3が、その鍔部の前方に対向室R7がそれぞれ区画され、ピストン間室と対向室とが連通されて反力室R8が形成され、その反力室を弾性的に加圧する機構、および、反力室とリザーバとの連通状態,非連通状態を切換える機構を備えたことを特徴とする。
(もっと読む)
路面摩擦係数演算装置
【課題】路面摩擦係数演算装置に関し、車両の走行状態に関わらず、路面状況に対応する路面摩擦係数を算出する。
【解決手段】車両に作用する前後加速度を検出する前後加速度検出手段1と、該車両に該前後加速度が検出されない状態での定常走行継続時間を計測する計時手段2と、計時手段2で計測された該定常走行継続時間が第一所定時間以上となったときに、該車両に微少制動力又は微少駆動力を第二所定時間だけ付与する制動駆動力付与手段3と、該微少制動力又は該微少駆動力が付与された後に、該車両が走行する路面の摩擦係数を算出する路面摩擦係数算出手段4とを備える。
計時手段2は、路面摩擦係数算出手段4で該摩擦係数が算出されたときに該走行経過時間をリセットして再び該定常走行継続時間の計測を開始する。これにより、所定時間毎に周期的に路面の摩擦係数が算出される。
(もっと読む)
電磁弁
【課題】比較的簡易な構成で異音を効果的に抑制できる電磁弁を提供する。
【解決手段】電磁弁100は、複数の作動液路108e,108fが形成されているスリーブ108と、スリーブ108に取り付けられ、外部からスリーブ108の内部へ作動液が流入する作動液路106aが形成されているシート106と、シート106の弁座106bに接離可能に配置されたロッド120と、弁座側の端部にロッド120が設けられているプランジャ122と、ソレノイドの働きによりプランジャ122をロッド120の開弁方向に吸引する固定子と、プランジャ122をロッド120の閉弁方向に付勢するばね110と、を備える。弁室102は、作動液路106aから作動液路108eに向かう流路の形状が、作動液路106aから作動液路108fに向かう流路の形状とは異なるように形成されている。
(もっと読む)
電気サーボブレーキを備えるブレーキシステム
ブレーキシステムが、サーボブレーキ(200)により駆動されマスターシリンダ(100)のピストン(110)を作動させるスラストロッド(130)を備える。このサーボブレーキ(200)は、液圧アクチュエータ(270)によりブレーキペダル(PF)の制御ロッド(230)にリンクされる。
サーボブレーキ(200)は、電気モータ(265)によりラックドライブ(260)を介して制御されるアクチュエータピストン(220)を備える。
液圧アクチュエータ(270)により境界画定されるシミュレータチャンバ(250)が、中間ピストン(240)によってそれぞれ境界画定された後方ボリューム(V1)および前方ボリューム(V2)に中間ピストン(240)によって下位分割される。
ダクト(L1)が、第1の電磁弁(EV1)により前方ボリューム(V2)にリンクされたダクト(L2)に後方ボリューム(V1)をリンクし、ダクト(L2)は、第2の電磁弁(EV2)によりタンク(115)にリンクされる。
ピストン(240)は、アクチュエータピストン(220)により押されることとなる当接部(132)を有するロッド(130)にリンクされる。
(もっと読む)
回生ブレーキ機能を備えたシステムに用いるブレーキ装置
【課題】ブレーキ装置において、急ブレーキ時の制動力の応答性を向上させる。
【解決手段】運転者が操作するブレーキペダル22と、ペダル反力を生成する反力バネ23と、インプットロッド24と、インプットロッド24の変位量に応じて液圧を生成するマスタシリンダ25と、ブレーキペダル22の変位速度に応じてインプットロッド24に伝達する力の大きさを可変するダンパ26と、ペダル変位量を検出するペダル変位センサ27と、液圧を生成する液圧アクチュエータ28と、液圧アクチュエータ28以下の液圧を検出する液圧センサ29と、で構成されている。急ブレーキ時にはダンパ26を介してブレーキペダル22に入力された力がインプットロッド24に伝達され、マスタシリンダ25に液圧が生じるため、液圧アクチュエータ28単独の作動より早く、大きな制動力を出力できる。
(もっと読む)
液圧制御装置
【課題】良好なブレーキフィーリングや違和感の少ないブレーキ操作の実現に寄与する液圧制御装置を提供する。
【解決手段】開弁圧が実質的にゼロのチェック弁は、機械式増圧弁56を迂回するように第1流路16aと並列に設けられた第2流路16bに接続され、マスタシリンダ側がホイールシリンダ側より高圧な場合にマスタシリンダの圧力をホイールシリンダ側へ伝達するとともにホイールシリンダ側のブレーキフルードがマスタシリンダ14へ逆流することを抑制する。カット弁は、機械式増圧弁56およびチェック弁60の下流側に設けられている。ECU90は、所定の条件下でブレーキペダル12の操作を検出した場合にカット弁を閉弁し、その後、マスタシリンダ14で発生している液圧が、開弁していたチェック弁60が閉弁する際の液圧よりも高く設定された目標液圧に達した場合に右マスタカット弁22FRを開弁する。
(もっと読む)
作業車両の制御装置
【課題】作業を容易に開始することができる作業車両の制御装置を提供する。
【解決手段】走行ペダルが非操作(PT≦PT1)で回転数Nが所定値N1以下の状態が所定時間継続されると、ブレーキロックと同時にラムシリンダをロックするようにしたので、煩雑なスイッチ操作をすることなくラムシリンダをロックすることができ、作業を容易に開始することができる。
(もっと読む)
ブレーキ制御装置
【課題】ホイールシリンダに作動液を供給するためのモータを効率よく駆動させ、制動に用いる電力の消費を抑えることができるブレーキ制御装置を提供する。
【解決手段】液圧回路を介したホイールシリンダへのブレーキ液の供給によりホイールシリンダに液圧を供給し、当該液圧により車輪に制動力を付与するブレーキ制御装置において、液圧源は、液圧回路中に設けられ、モータの回転数に応じてホイールシリンダに液圧を供給する。液圧調整弁は、通電制御により開度が調節されて、ホイールシリンダの液圧を調整する。制御部は、モータの回転数と液圧調整弁の開度を制御することで車輪に付与する制動力を制御する。その制御部は、所定車速以下である場合に、モータを停止しつつ液圧調整弁の開度を調節して車輪に制動力を付与する制御を実行する。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】運転者の運転意図に反した加減速が行われることのない車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、自車両と前方障害物との余裕時間に基づいて自車両のリスクポテンシャルを算出し、リスクポテンシャルが大きいほどアクセルペダルを操作するときに発生する操作反力を増大させる。またリスクポテンシャルが大きいほど、自車両に発生する駆動力を低下するとともに制動力を増大させる。リスクポテンシャルに応じた制駆動力制御を行う場合に、加速意図の場合は加速抑制までを許可し、一定意図の場合はエンブレまでを許可し、エンブレ意図の場合は緩減速制御までを許可し、緩減速意図の場合は減速制御までを許可し、減速意図の場合は運転者のブレーキペダル操作と制動制御との加算処理までを許可するように、制駆動力制御の作動スケジュールを変更する。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
ブレーキ制御システム
【課題】マスタシリンダ圧を精確に検知し、バックアップする機能を備えて、的確なブレーキ制御を可能とするブレーキ制御システム。
【解決手段】運転者のブレーキ操作により作動するマスタシリンダと、ブレーキ操作の量に応じて前記マスタシリンダ内の圧力を調整する第1の機構と、前記第1の機構の作動を制御する第1の制御装置と、マスタシリンダ内の前記圧力がホイールシリンダに連通するのを調整する第2の機構と、前記第2の機構の作動及び前記ホイールシリンダに連通される圧力を加圧するポンプ装置の作動を制御する第2の制御装置とを備え、第1及び第2の制御装置は、それぞれの電源回路及びCPUを内蔵し、前記マスタシリンダ内の圧力を計測するものであって前記第1の制御装置に結線される第1の液圧センサと、前記マスタシリンダ内の圧力を計測するものであって前記第2の制御装置に結線される第2の液圧センサと、を装備したことを特徴とする。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
車両の速度制御装置
【課題】車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置を提供すること。
【解決手段】車両の前方における車両が走行している道路上の複数の位置データ(ノード点)Nd[n]が取得され、各ノード点Nd[n]における道路の屈曲度Rc[n]が演算される。この屈曲度Rc[n]に基づいて、カーブ内屈曲度一定区間Cr#が識別され、Cr#についてのカーブ内一定屈曲度Rm#、及びカーブ端点位置Px#が決定される。車両の実車速Vxa、カーブ内一定屈曲度Rm#から演算される適正車速、及び、カーブ端点位置Px#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。即ち、カーブ内において最も屈曲度が大きい区間の開始地点、及びその区間の一定屈曲度に基づいてカーブ減速制御がなされる。
(もっと読む)
車両の運動制御装置
【課題】自動加圧制御が実行されても運転者のブレーキ操作に対する狙いとする減速度を安定して確保し得る車両の運動制御装置を提供すること。
【解決手段】この装置は、モータM(液圧ポンプ)の駆動制御により原則的に所定の高圧(下限値Pon以上)に調整されるアキュムレータ液圧Paccを利用して作動するハイドロブースタを備えた車両のブレーキ装置に適用される。この装置は、Paccを利用して複数の電磁弁を制御して自動加圧制御(オーバーステア(OS)抑制制御)を実行する。OS抑制制御でのブレーキ液圧の増加勾配は、車両の運動状態(車体スリップ角)に基づいて原則的に決定される。ただし、OS抑制制御開始時点でのPaccが「ハイドロブースタによるブレーキ操作の助勢に必要なPaccの下限値(アシスト限界値Passist)より大きくてPonよりも小さい基準液圧Pref」未満の場合、上記増加勾配が所定の制限値以下に制限される。
(もっと読む)
321 - 340 / 854
[ Back to top ]