
Fターム[3D246HA03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931) | ストローク (854)
Fターム[3D246HA03]に分類される特許
241 - 260 / 854
複合ブレーキの協調制御装置
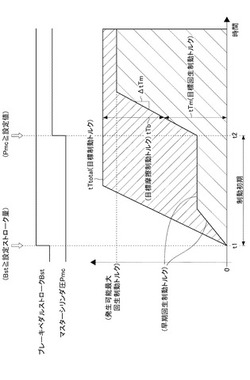
【課題】制動初期における摩擦制動の応答遅れを補う回生制動が中止された場合でも、違和感を伴う減速度の急変を生じないようにする。
【解決手段】マスターシリンダ圧が発生させ始める瞬時t1より、目標制動トルクtTtotalはブレーキペダルの踏み込み応じて図示のごとくに立ち上がる。瞬時t1より、マスターシリンダ圧が設定値以上になる瞬時t2までの間、目標制動トルクtTtotalを発生可能最大回生制動トルクで賄い得てtTm=tTtotalにすべきところながら、目標回生制動トルクtTmに対し、制限された早期回生制動トルクを設定すると共に、不足分を補う目標摩擦制動トルクtTbとにより目標制動トルクtTtotalを実現する。この制限された早期回生制動トルクは、回生制動を中止せざるを得なくなって回生制動トルクが早期回生制動トルクから一気に0になった場合でも、車両の減速度が運転者に違和感を与えることのない値とする。
(もっと読む)
ヒルスタートアシスト制御装置及びその制御方法

【課題】登坂路停車時において消費電力を抑えつつも車両の後退を防止することが可能なヒルスタートアシスト制御装置及びその制御方法を提供する。
【解決手段】ヒルスタートアシスト制御装置1は、登坂路停車時にブレーキペダルが戻されてもブレーキが掛かったままの状態で保持するものである。このヒルスタートアシスト制御装置1は、モータから発生するクリープトルクを低減させるクリープカット制御部25を備え、このクリープカット制御部25は、登坂路停車時にブレーキが戻された場合に、登坂路の路面勾配と戻される前のブレーキ力とに基づいて、クリープトルクの低減量を算出し、算出された低減量に基づいてクリープトルクを設定する。
(もっと読む)
回生協調ブレーキ用ストロークシミュレータ
【課題】 非回生協調ブレーキ作動時と回生協調ブレーキ作動時とのブレーキペダル作動フィーリングを同一とする、小型簡素化されたストロークシミュレータを提供する。
【解決手段】 ブレーキペダルの回動支点と、遊星歯車機構と、マスタシリンダに連繋するプッシュロッドを駆動するプッシュロッドアームとを同軸に構成して、正逆転自在なモータの回動を遊星歯車機構に作用させて、回生協調ブレーキ作動時には非回生協調ブレーキ作動時のブレーキペダル入力に対応するブレーキペダルストローク線図となるよう補正制御をする。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による制動時、従動輪の摩擦トルクがばらついても、総制動トルクのばらつきを低減。
【解決手段】ブレーキ操作に基づく総制動トルク指令Ftotal*に対し、左右前輪の回生ブレーキによる回生トルク指令Fm*と、左右前輪および左右後輪の各摩擦ブレーキによる摩擦トルク指令Fb*を演算する回生/摩擦トルク演算部B1と、左右前輪および左右後輪の各摩擦ブレーキで実行される摩擦トルク値である摩擦トルク実行値Fbを推定演算する摩擦トルク実行値演算部B2と、摩擦トルク指令Fb*と摩擦トルク実行値Fbの偏差を、左右前輪および左右後輪の各輪分について算出し、これらの偏差を足し合わせた摩擦トルク総偏差を、回生トルク指令Fm*に加える回生トルク補正値Fm_addとして出力する回生トルク補正値/摩擦トルク補正値演算部B5と、を備えた。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置において、回生協調制御実行中に、マスタシリンダ内のブレーキ液圧の急激な変動を抑制して、減速度の急変を抑制し、運転者に与える違和感を小さくする。
【解決手段】入力ピストン32に連結されたブレーキペダルの操作に応じて、コントローラCによって電動モータ40を作動させ、入力ピストン32及びプライマリピストン10の位置に基づき、マスタシリンダ2内のブレーキ液圧を制御する。回生協調制御実行中に、プライマリピストン10の後退位置を制限してリザーバポート20が開かないようにする。これにより、回生制動の増大に伴うプライマリピストン10の後退により、リザーバポート20が開いてマスタシリンダ2内のブレーキ液圧が急激に変動するのを防止することができ、減速度の急変を抑制し、運転者に与える違和感を小さくすることができる。
(もっと読む)
車両用ブレーキ装置および車両用ブレーキ装置の制御方法
【課題】 BBW式のブレーキ装置において、単一の液圧室を備える簡単な構造のスレーブシリンダを採用しながら、二つのブレーキ系統の一方の系統が失陥したときのバックアップを可能にする。
【解決手段】 マスタカットバルブ32を閉弁して連通制御バルブ41を開弁し、第1、第2液路Pb,Qbを共にスレーブシリンダ42に接続することで、タンデム式のスレーブシリンダが不要になって構造の簡素化が可能になる。また電源の失陥時には、マスタカットバルブ32を開弁して連通制御バルブ41を閉弁することで、マスタシリンダ11の第1、第2液圧室17,19が発生したブレーキ液圧でそれぞれ第1、第2系統のホイールシリンダ26,27;30,31を作動させる。その際に第1、第2液路Pb,Qbの相互の連通が遮断されているので、第1、第2系統の一方の系統が液漏れ失陥しても、他方の系統の作動を可能にして制動力を確保することができる。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置において、ブレーキペダルの踏み込み開始時点から所定状態となるまでの低踏力領域において回生制動力を積極的に利用することにより、高回生効率、高燃費を達成するとともに、ブレーキペダルが急踏みされた場合に基礎液圧制動力をできるだけ早期に付与する。
【解決手段】車両用ブレーキ装置において、マスタシリンダ23の第1液圧室23dに設けられてリザーバタンク24と連通する第1ポート23hを、同ポート23hを閉塞する第1ピストン23bの閉塞端の踏み込み開始状態に対応した第1位置から第1ピストン23bの増圧方向に所定距離Sだけ離れた所定状態に対応した第2位置に設けるようにしている。第1ポート23hには、ブレーキペダルの急踏み時においては、マスタシリンダからリザーバタンクへのブレーキ液の流れを制限し、一方非急踏み時においては、流れが制限されないように構成されたオリフィスが設けられている。
(もっと読む)
車両用ブレーキ装置
【課題】車両用ブレーキ装置において、ブレーキペダルが非急踏みされた場合に回生制動力を積極的に利用することにより、高回生効率、高燃費を達成するとともに、ブレーキペダルが急踏みされた場合に基礎液圧制動力をできるだけ早期に付与することの両立を図る。
【解決手段】車両用ブレーキ装置は、ブレーキペダルとマスタシリンダのピストンとの間に設けられた連結部材に備えられ、第1ロッド26aと、第2ロッド26bと、両ロッド26a,26bを離れる方向に付勢する付勢部材73とを備えた操作力伝達機構70を備えている。操作力伝達機構70は、両ロッド26a,26bの間に形成されている内部空間75と外部とを連通して内部空間75内の流体が流入出する連通路74を備え、連通路74は、内部空間75からの流体の流出がブレーキペダルの急踏み時には制限され、非急踏み時には制限されないように構成されている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の加速度に基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の運転操作に起因して変動する加速度の変動成分のうち予め定めた特定のノイズ成分を減衰させるノイズ成分除去手段(ブロックB31〜B39)と、そのノイズ成分除去手段によりノイズ成分を減衰させた加速度に基づいて指標を求める走行指標設定手段(ブロックB40)とを設けた。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両用制動装置
【課題】車両用制動装置において、ドライバの意思確認を適正に行って駐車維持装置の作動を判断することで安全性及び操作性の向上を図る。
【解決手段】車両10の停止状態を維持する停止維持装置としてのディスクブレーキ装置20と、車両10の駐車状態を維持する駐車維持装置としてのパーキングブレーキ装置40とを設け、パーキングブレーキECU54は、ドライバの運転姿勢に基づいて車両10の運転を継続する運転継続意思を判定し、ドライバがディスクブレーキ装置20を作動し、且つ、ドライバに運転継続意思がないと判定したときには、パーキングブレーキ装置40を作動させる。
(もっと読む)
車両のブレーキシステム
【課題】極力少ない電磁弁の作動によって回生協調ブレーキ制御を行うことでき、かつ、失陥時に制動力を確保可能な車両のブレーキシステムを提供すること。
【解決手段】ブレーキペダル操作によってマスタシリンダ圧を発生するタンデム型マスタシリンダと、前輪系統配管と後輪系統配管とを連通すると共に、第2マスタシリンダ室と前記後輪系統配管とを遮断する第1ポジションと、前記前輪系統配管と前記後輪系統配管とを遮断すると共に前記第2マスタシリンダ室と前記後輪系統配管とを連通する第2ポジションとを有するカットバルブと、後輪に接続され、回生力を発生可能なモータジェネレータと、液漏れ検出手段により液漏れが検出されていないときは前記カットバルブを前記第1ポジションとし、液漏れが検出されたときは前記カットバルブを前記第2ポジションに切り換えるコントローラを備えた。
(もっと読む)
車両の監督されていない動作を防止する方法およびシステム
ブレーキ制御装置
【課題】ECUに異常が生じる前にモータ駆動回路の作動状態を点検できるブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置において、CPU222および入出力IC224は、ポンプを駆動するモータ632の駆動を制御する。複数のモータ駆動回路は、それぞれがモータ632の駆動信号を個別に出力し、並列に配される。調停回路232は、CPU222または入出力IC224の異常を示す信号を受け取った場合に、複数のモータ駆動回路の駆動信号のうち、いずれか一つの駆動信号を選択して出力し、該駆動信号をモータ632に供給する。CPU222および入出力IC224は、CPU222および入出力IC224の異常を示す信号を出力し、調停回路232から受け取ったモータ駆動回路の出力にもとづいてモータ駆動回路の作動状態を点検する。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置の電源電圧が低下した際に、そのフェールセーフ制御を効果的かつ低コストに実現する。
【解決手段】ブレーキECU200は、通常の制動制御状態においては開閉弁28,30を閉弁させつつモータ40,42を駆動し、調整弁46〜54の開度を調整することで、ポンプ32,36からマスタシリンダ14への作動液の供給を遮断しつつ、ポンプ32〜38から吐出された作動液のホイールシリンダ20への供給量を調整する。一方、ブレーキECU200は、電源電圧が開閉弁28,30の最低作動電圧よりも低い低電圧状態となった場合にもモータ40,42を駆動し、ポンプ32,36から吐出された作動液の一部がマスタシリンダ14へ供給されることを許容する。
(もっと読む)
制動制御装置
【課題】回生効率を高めつつ、ブレーキフィーリングの違和感を抑制する。
【解決手段】ブレーキペダル11が踏み込まれたときにM/C13内のブレーキ液を流入させるリザーバ16とリザーバ16へのブレーキ液の流入を制御する電磁弁17を備え、電磁弁17の制御によるM/C圧の変化に対応して電動サーボ装置12のサーボ力を変化させる。例えば、電磁弁17を連通状態とすることで、回生制動力のみを発生させるときにM/C圧が発生しないようにし、サービス制動力を発生させないようにする。これにより、回生効率を向上させることが可能となる。また、電磁弁17を駆動することによって、通常発生するべきM/C圧が発生しなくなるため、それに対応して電動サーボ装置12によって逆サーボ力を発生させる。F−S特性を回生協調を行わない通常の制動の場合に近づけることもしくは同一とすることが可能となる。
(もっと読む)
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
ブレーキ制御装置
【課題】回生制動中におけるシフト操作が摩擦制動装置の耐久性に与える影響を軽減する。
【解決手段】ブレーキ制御装置は、変速機構を介して車輪に接続されているモータを含み、該モータの回生により該車輪に回生制動力を付与する回生ブレーキユニットと、車輪に摩擦制動力を付与する摩擦ブレーキユニットと、回生制動力と摩擦制動力とを併用して要求制動力を発生させるよう回生ブレーキユニット及び摩擦ブレーキユニットを制御する制御部と、を備える。制御部は、制動中にシフト操作がされたときに該シフト操作直前の回生制動力の目標値より小さい上限値を設定し、当該制動中は該上限値による制限のもとで回生制動力を制御する。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
241 - 260 / 854
[ Back to top ]