
Fターム[3D246HA03]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | ブレーキ初動装置 (2,070) | 常用ブレーキ (1,931) | ストローク (854)
Fターム[3D246HA03]に分類される特許
281 - 300 / 854
走行制御装置および走行制御方法
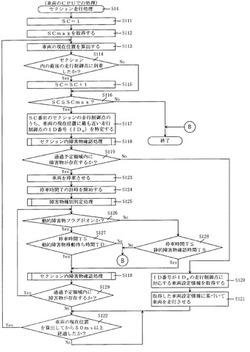
【課題】車両の安全を確保しつつ、車両に走行経路上をより先に進行させることができる走行制御装置および走行制御方法を提供すること。
【解決手段】走行制御装置100は、走行経路RT1を、経路パターンPT1〜PT10に対応する走行経路ごとに区切ってセクションを設定する。そして、車両1が走行経路RT1を自律走行している場合、車両1が現在走行しているセクションのうち、車両1の現在位置からそのセクションの終端までの走行領域を、車両1がこれから通過する予定の領域(通過予定領域)KFと設定し、その通過予定領域KF内に障害物が存在しない間、車両1にセクション内を進行させる。よって、障害物が存在するセクションの手前までは車両1を進行させることができるので、車両1の安全を確保しつつ、車両1に走行経路上RT1〜RT3をより先に進行させることができる。
(もっと読む)
車両の制駆動力制御装置

【課題】車両の制駆動力制御装置において、走行抵抗の大きな路面であっても、最適な制動力により車両を停止することで容易に再発進を可能とする。
【解決手段】車両11が走行する路面の走行抵抗を検出する走行抵抗検出部62と、駆動力の余剰分を検出する駆動力余剰分検出部63と、ドライバの要求制動力を算出する要求制動力算出部64と、路面の走行抵抗が予め設定された所定の走行抵抗より大きいときに要求制動力から駆動力の余剰分を減算して目標制動力を算出する目標制動力算出部65とを設ける。
(もっと読む)
制動力制御装置
【課題】BBW制御時における目標減速度の上昇応答性を向上した制動力制御装置を提供する。
【解決手段】マスタシリンダ2とホイルシリンダ3FR〜3RRとの間の連通を遮断した状態で、マスタシリンダ圧P及びブレーキペダル1の踏み込みストローク量Sに基づいて目標減速度を算出する。その算出は、マスタシリンダ圧に基づき求めたマスタ側の仮目標減速度Gpと、踏み込みストローク量Sに基づき求めたストローク側の仮目標減速度Gsとのうち、値が大きい仮目標減速度の方を上記目標減速度Gfとする。
(もっと読む)
電子ブレーキシステム用のペダルアセンブリ
電気−機械式ブレーキ装置は、ブラケット(20)と、ブラケット(20)によって支持されるペダルアーム(40)とを含む。ブラケット(20)およびペダルアーム(40)の一方は、カム体(72)をもたらす。ペダルアーム(40)およびブラケット(20)の他方は、カムフォロワ(64)をもたらす。カム体(72)およびカムフォロワ(64)の一方は回転可能である。カムバイアス(86)は、回転可能な一方のカム体(72)およびカムフォロワ(64)をブラケット(20)およびペダルアーム(40)の一方に相互接続する。ペダルアーム(40)がブラケット(20)の方に移動するにつれ、カムフォロワ(64)はカム体(72)に沿って動き、カムバイアス(86)を圧縮させて純粋に機械式ブレーキシステムの感じをシミュレーションする。特定の実施例において、ブラケット(20)はカム体(72)をもたらし、他の実施例では、ペダルアーム(40)がカム体をもたらす。特定の実施例において、カム体(72)が回転するのに対して、他の実施例ではカムフォロワ(64)が回転する。 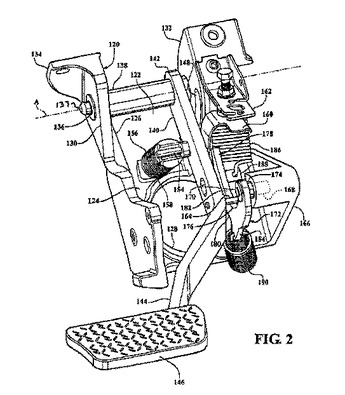 (もっと読む)
(もっと読む)
制御可能な空圧式ブレーキブースタおよびその作動方法
本発明は、マスタシリンダに支援力を加える真空式ブレーキブースタならびに真空式ブレーキブースタを作動するための方法に関する。真空式ブレーキブースタの支援力は、調節装置ならびに主制御弁を介して調節することができる。したがって、ブレーキブースタは2つの作動モードで作動可能であり、第1作動モードでは、支援力は調節装置によって調節され、第2作動モードでは主制御弁によって調節される。本発明によるブレーキブースタは、特に液圧式ブレーキシステムおよび別のブレーキシステムの作用が組み合わされたブレーキ装置で使用することができ、液圧式ブレーキシステムのブレーキ作用は、例えば、電気自動車またはハイブリッド車両の回生ブレーキにおける別のブレーキシステムのブレーキ作用に適合される。 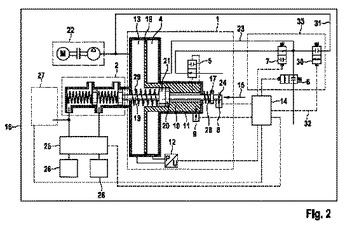 (もっと読む)
(もっと読む)
自動車用ブレーキシステムの作動方法及びブレーキシステム
本発明は、自動車用ブレーキシステム(1)を制御する方法に関し、少なくとも1の電気回生ブレーキ(4)と、摩擦ブレーキ(2)を有しかつ圧力媒体、特に液圧で作動されるブレーキシステムとを備え、各車輪に割り当てられた摩擦ブレーキ(2)は、特にタンデム型マスターブレーキシリンダである第1制動圧発生装置(8)で圧力媒体を供給される少なくとも2つのブレーキ回路(I,II)に配置され、各ブレーキ回路(I,II)は少なくとも1の圧力アキュムレータ(12−I,12−II)と少なくとも2つの電子的に作動可能な液圧弁(14,16,18,20)とを有する。電気回生ブレーキ(4)を用いた制動中、好適なポイントで少なくとも1の液圧弁(16)を好適に作動することにより、圧力媒体が1の所定の圧力アキュムレータにのみ正確に排出される。本発明は更に対応するブレーキシステム(1)にも関する。 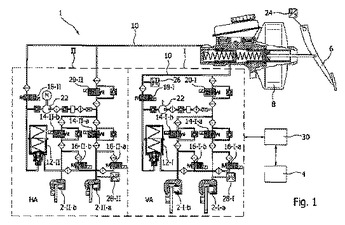 (もっと読む)
(もっと読む)
車両の前後加速度修正装置を備えた車両の諸元推定装置、及び車両の前後加速度修正装置
【課題】
前後加速度の誤差を考慮して、車両の積載量によって変化する車両諸元(例えば、車両重量)を精度良く推定するための前後加速度の修正装置を提供する。さらに、この前後加速度修正装置によって推定された前後加速度の情報に基づいて高精度に車両諸元を推定する。
【解決手段】
車両の前後加速度修正装置は、車両の前後加速度(Gxa)を取得する前後加速度取得手段(GXA)と、前記車両に作用する走行抵抗(Grr)を取得する走行抵抗取得手段(GRR)とを備え、前記前後加速度(Gxa)から前記走行抵抗(Grr)を除いて修正加速度(Gxs)とする。車両の諸元推定装置は、加速操作量取得手段(ASA)によって取得される加速操作量(Asa)、或いは、減速操作量取得手段(BSA)によって取得される減速操作量(Bsa)と、前記修正加速度(Gxs)とに基づいて、前記車両諸元を推定する。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定し、車両旋回状態にて各車輪の不要な前後スリップの発生を抑制しつつ小回り性を向上し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の基準位置(点O)が決定され、この基準位置から車両に近い側に車両の旋回中心(点P)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωptが演算される。この目標角速度と、旋回中心からの各車輪の距離Rpw[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され且つ小回り性が向上するように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づく。
(もっと読む)
ブレーキ制御装置
【課題】電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図る技術を提供する。
【解決手段】ブレーキ制御装置は、ブレーキペダルの操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するものであり、ブレーキペダルのストロークを検出するためのストロークセンサと、ホイールシリンダ圧を検出するためのホイールシリンダ圧センサと、ブレーキペダルのストローク量に基づいてホイールシリンダの目標液圧dを算出し、ホイールシリンダの液圧を目標液圧dに近づけるように調節するためのブレーキECUと、を備える。ブレーキECUは、ホイールシリンダ圧センサの検出液圧値eを用いてホイールシリンダの液圧を調節する通常調節と、検出液圧値eを減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能である。
(もっと読む)
車両の協調制御装置
【課題】 横滑り防止装置およびトラクションコントロール装置を協調制御する際に、車両の加速性能および旋回挙動性能の両立を図る。
【解決手段】 横滑り防止装置VSAおよびトラクションコントロール装置TCSを協調制御する協調制御手段が、駆動輪WRL,WRRの車輪速と車体速とを比較して該駆動輪WRL,WRRのスリップ量を算出し、スリップ量が閾値以上の場合にはトラクションコントロール装置TCSを横滑り防止装置VSAに優先して作動させるので、先ずトラクションコントロール装置TCSでスリップ量が過大な状態を解消して旋回挙動制御の制御性を高めることができ、またスリップ量が閾値以上の場合には横滑り防止装置VSAをトラクションコントロール装置TCSに優先して作動させるので、車両の加速性能を最大限に確保しながら横滑り防止装置で旋回挙動を安定させることができる。
(もっと読む)
ブレーキ制御装置および電磁弁の作動判定方法
【課題】ブレーキ制御装置の作動流体通路に配設された電磁弁の作動状態を判定する。
【解決手段】ブレーキ制御装置は、車両の各車輪に対応して設けられるホイールシリンダに作動流体を供給して制動力を付与する。ホイールシリンダへの作動流体の流路には、ソレノイドとソレノイドへの電流の印加によって作動するプランジャとを有する電磁弁が配設される。電流指令部106は、プランジャを作動させるための起動電流を電源からソレノイドに供給する。電流計測部102は、ソレノイドを流れる電流値を計測する。バルブ作動判定部104は、ソレノイドへの電流の供給開始後、電流計測部102により計測された電流値が予め定められた値以上低下したとき、プランジャが作動したと判定する。プランジャが作動したと判定されたとき、電流指令部106は、起動電流よりも電流値の低い保持電流をソレノイドに供給する。
(もっと読む)
電動車両の制動制御装置
【課題】電気的制動手段と油圧制動手段とを備え、アンチロック制御を行う際に、静粛性を向上することが可能な電動車両の制動制御装置を提供すること。
【解決手段】目標制動トルクを駆動系の共振周波数を含まない第1周波数成分と、駆動系の共振周波数を含む第2周波数成分とに分解し、第1周波数成分により電気的な制動トルクを与える電動モータを制御し、第2周波数成分により車輪に摩擦制動トルクを与える摩擦制動装置を作動させることとした。
(もっと読む)
ブレーキ制御装置
【課題】エンジンルーム内におけるレイアウト自由度の向上を図ることが可能なブレーキ制御装置を提供すること。
【解決手段】マスタシリンダと各輪に制動力を発生するホイルシリンダとを接続する配管上に設けられたブレーキユニットであって、前記ブレーキユニットは、ハウジングの上面に形成された前記マスタシリンダと配管を介して接続する第1ポートと、前記ハウジングの上面に形成された前記ホイルシリンダと配管を介して接続する第2ポートと、前記ハウジング内に設けられたポンプと、前記ハウジングの第1側面に取り付けられ前記ポンプを回転駆動するモータと、前記運転者のブレーキペダル操作により移動するマスタシリンダ内のブレーキ液を貯留するストロークシミュレータと、を備え、前記ストロークシミュレータは、前記第1側面において前記モータのモータ回転軸を通り前記上面に平行な仮想線と上面との間に位置するように取り付けられている。
(もっと読む)
車両のブレーキ制御装置
【課題】勾配センサ等を設けたり、複雑な演算を要することなく、坂道発進補助装置の制動力解除を適切なタイミングで行うことのできる車両のブレーキ制御装置を提供すること。
【解決手段】坂道発進補助機能により制動力が保持されている状態から発進する際に、車軸トルクが、発進段に応じて設定された車軸トルク規定値以上となったときに、坂道発進補助機能を解除する(S4、6)。
(もっと読む)
坂道発進補助装置
【課題】運転者の意図に沿ったより適切な坂道発進補助を実行することができる坂道発進補助装置を提供すること。
【解決手段】本発明による坂道発進補助装置1は、坂道発進補助制御を実行する制御手段7aと、マスターシリンダ圧を検出するマスターシリンダ圧検出手段16と、ステアリング角を検出するステアリング角検出手段9を含み、マスターシリンダ圧が所定圧より大きくステアリング角が所定角未満である場合に制御手段7aが坂道発進補助制御を開始することを特徴とする。
(もっと読む)
ブレーキ制御装置
【課題】変速時のブレーキフィーリングの向上と回生制動力の活用とを両立する。
【解決手段】ブレーキ制御装置は、変速機構を介して車輪に接続されている電動機を含み、該電動機の回生により該車輪に回生制動力を付与する回生ブレーキユニットと、車輪に摩擦制動力を付与する摩擦ブレーキユニットと、回生制動力と摩擦制動力とを併用して要求制動力を発生させるよう回生ブレーキユニット及び摩擦ブレーキユニットを制御する制御部と、を備える。制御部は、変速が行われる可能性が高いか否かを判定し、当該可能性が高いと判定した場合には回生制動力に余力を残すよう回生制動力と摩擦制動力との配分を調整して要求制動力を発生させる。
(もっと読む)
ブレーキ制御装置
【課題】アキュムレータの蓄圧が基準を下回った場合にも適正なブレーキ液圧を提供する。
【解決手段】ブレーキ制御装置20は、アキュムレータ35に作動液を蓄圧するためのポンプ36と、アキュムレータ35に蓄圧された作動液をホイールシリンダ23に供給するための第1供給経路と、ポンプ36の送出する作動液をホイールシリンダ23に供給するためのバイパス経路82と、第1供給経路及びバイパス経路82の一方によりホイールシリンダ23に作動液を供給するよう第1供給経路とバイパス経路82とを切り替える切替弁80と、アキュムレータ35の蓄圧が基準を満たすか否かを判定し、当該基準を満たす場合には第1供給経路を選択し該基準を下回る場合にはバイパス経路82を選択するよう切替弁80を制御するブレーキECU70と、を備える。
(もっと読む)
ブレーキ液圧制御装置
【課題】 ブレーキ液圧制御装置において、ポンプ作動時のモータから発生する振動に起因する音振を抑制すること。
【解決手段】 ハウジングに互いに回転軸が同じ方向になるように組み付けられ、独立して駆動可能な2組の回転駆動式ポンプモータと、前記ハウジング内に設けられ、前記各ポンプモータにより駆動される2組のポンプと、前記ハウジングに組みつけられ、ブレーキ液を加圧して車両に設けられた複数のホイルシリンダを加圧するために前記各ポンプモータを回転駆動可能なコントロールユニットと、を備え、前記コントロールユニットは、運転者のブレーキ操作に応じて演算される指令値に基づき前記各ポンプモータを回転駆動し、前記ホイルシリンダに対する要求液圧が設定された液圧より高い場合には前記各モータを互いに逆回転させ、低い場合には前記回転駆動式ポンプモータの1つを回転させて前記ホイルシリンダを加圧することした。
(もっと読む)
制動制御装置
【課題】通信遅れなどによって回生制動力の実行値が適切に取得できない場合があった。
【解決手段】制動制御装置15において、ブレーキECU70は、車両1に与えるべき目標制動力を設定し、目標制動力が車両1に与えられるよう、回生ブレーキユニット10によって車両1に与えるべき目標回生制動力および液圧ブレーキユニット20によって車両1に与えられるべき目標摩擦制動力を算出する。ブレーキECU70は、車速と、回生ブレーキユニット10によって車両1に付与可能な最大回生制動力との対応関係を保持し、検出された車速にその対応関係において対応付けられた最大回生制動力を取得する。ブレーキECU70は、検出された車速が所定速度範囲内の場合、取得した最大回生制動力に基づいて目標回生制動力および目標摩擦制動力を算出する。
(もっと読む)
281 - 300 / 854
[ Back to top ]