
Fターム[3D246HA44]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 圧力 (1,845) | ホイールシリンダ圧 (577)
Fターム[3D246HA44]に分類される特許
141 - 160 / 577
ブレーキ液圧制御装置
【課題】 ブレーキ液圧制御装置において、ポンプ作動時のモータから発生する振動に起因する音振を抑制すること。
【解決手段】 ハウジングに互いに回転軸が同じ方向になるように組み付けられ、独立して駆動可能な2組の回転駆動式ポンプモータと、前記ハウジング内に設けられ、前記各ポンプモータにより駆動される2組のポンプと、前記ハウジングに組みつけられ、ブレーキ液を加圧して車両に設けられた複数のホイルシリンダを加圧するために前記各ポンプモータを回転駆動可能なコントロールユニットと、を備え、前記コントロールユニットは、運転者のブレーキ操作に応じて演算される指令値に基づき前記各ポンプモータを回転駆動し、前記ホイルシリンダに対する要求液圧が設定された液圧より高い場合には前記各モータを互いに逆回転させ、低い場合には前記回転駆動式ポンプモータの1つを回転させて前記ホイルシリンダを加圧することした。
(もっと読む)
制動制御装置

【課題】通信遅れなどによって回生制動力の実行値が適切に取得できない場合があった。
【解決手段】制動制御装置15において、ブレーキECU70は、車両1に与えるべき目標制動力を設定し、目標制動力が車両1に与えられるよう、回生ブレーキユニット10によって車両1に与えるべき目標回生制動力および液圧ブレーキユニット20によって車両1に与えられるべき目標摩擦制動力を算出する。ブレーキECU70は、車速と、回生ブレーキユニット10によって車両1に付与可能な最大回生制動力との対応関係を保持し、検出された車速にその対応関係において対応付けられた最大回生制動力を取得する。ブレーキECU70は、検出された車速が所定速度範囲内の場合、取得した最大回生制動力に基づいて目標回生制動力および目標摩擦制動力を算出する。
(もっと読む)
電磁弁
【課題】自励振動を抑制する等によって、より実用的な電磁弁を得る。
【解決手段】流量制御弁たる電磁弁400のプランジャ410の基端側にストレート部420を設け、そのストレート部420より先端側の部分を、先端に向かって直径が漸減するテーパ部422とする。それにより、プランジャ410を、ストレート部420とハウジング120との嵌合部を中心に傾動可能とする。プランジャ410の後退限度を、吸引面196とプランジャ410の肩面との、薄板194を介しての当接により規定し、その後退限度においてもプランジャ410の先端に保持させた弁子としてのボール130が、弁座128としてのテーパ面に接触可能とする。いかなる開度においても、ボール130が弁座128に接触し続け、プランジャ410の軸方向の振動が抑制される。
(もっと読む)
ブレーキ制御装置
【課題】車輪にかかる制動力の差を低減しつつ、ホイールシリンダへブレーキ液を供給するためのポンプを起動したときの突入電流の重なりを防ぐブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置100は、液圧回路中に設けられたポンプを介して、駆動に応じてホイールシリンダ6にブレーキ液を供給する複数のポンプと、ポンプを駆動することでホイールシリンダ6へのブレーキ液の供給を制御するとともに、複数のポンプによるブレーキ液の供給の応答性を比較する制御手段と、を備える。制御手段は、ポンプによるブレーキ液の供給の応答性にもとづいてモータの駆動の開始のタイミングを異ならせる。
(もっと読む)
ブレーキ制御装置
【課題】電磁弁に発生しうる振動を抑制することができるブレーキ制御装置を提供することにある。
【解決手段】ブレーキ制御装置は、ブレーキ液が供給されて車輪に制動力を付与するホイールシリンダと、ホイールシリンダに流路を介して接続され、通電制御により開度が調整される電磁弁と、パルス幅変調制御されたパルス信号を電磁弁に通電する制御をする制御部と、を備える。そして制御部は、電磁弁における自励振動の発生が予測された場合に、電磁弁に通電するパルス信号の周波数を所定の通常周波数より高くする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】減圧量の変動があっても、ブレーキフィーリングが大きく変化しないようにする。
【解決手段】車両用ブレーキ液圧制御装置は、液圧源側から車輪ブレーキへの液圧路に配置され、通電量によって閉弁力が調整可能な常開型比例電磁弁と、車輪ブレーキから液圧源への液圧路に配置された常閉型電磁弁と、常開型比例電磁弁および常閉型電磁弁への通電量を制御することで、車輪ブレーキ内の液圧を増圧状態、保持状態または減圧状態に切り替える制御を行う制御手段と、を備える。制御手段は、減圧状態または保持状態から増圧状態へと移行する場合に、折れ点目標液圧まで第1の勾配PG1で増圧させるとともに、折れ点目標液圧から増圧終了まで第1の勾配PG1より緩い第2の勾配PG2で増圧させるように制御し、折れ点目標液圧PBを、減圧開始圧PRから所定のオフセット圧PSを減算することで決定する。
(もっと読む)
ブレーキ制御装置
【課題】大幅な設計変更や放熱促進部品の追加を伴うことなく効率的な放熱構造を持つブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置20は、マスタシリンダユニット27と、制動要求に応じてブレーキフルードの流動状態を制御する複数の電磁制御弁206を含む液圧アクチュエータユニット40と、アクチュエータを駆動制御する電子部品を搭載する制御基板202と、を含む。制御基板202は、マスタシリンダユニット27のシリンダハウジング27aと液圧アクチュエータユニット40のユニットハウジング40aの間に挟装される。制御基板202は、そこで発生した熱を少なくともシリンダハウジング27aに伝導可能に接続されている。
(もっと読む)
連結車両の挙動制御装置
【課題】スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供すること。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
(もっと読む)
車両用ブレーキ圧制御装置
【課題】旋回時において旋回外輪の制動力を効率よく発揮することができる車両用ブレーキ圧制御装置を提供することを目的とする。
【解決手段】車両用ブレーキ圧制御装置は、左右輪の許容差圧を設定する許容差圧設定手段と、許容差圧設定手段で設定した前記許容差圧と左右輪のうちの低摩擦側の車輪に加わる低摩擦側ブレーキ圧とを足し合わせた値を高摩擦側の車輪に加わる高摩擦側ブレーキ圧の目標制御圧として設定する目標制御圧設定手段と、高摩擦側ブレーキ圧を目標制御圧に基づいて制御する高摩擦側ブレーキ圧制御手段を備える。許容差圧設定手段は、車体速度(第1マップM1)に基づいて左右後輪の許容差圧を求めるように構成され、車体速度から求めた左右後輪の許容差圧は常に0よりも大きな値になっている。
(もっと読む)
ブレーキ制御システム
【課題】ブレーキ操作量検出装置を使用する複数の制御装置を有するブレーキ制御システムにおいて、ブレーキ操作量検出装置を1つにするブレーキ制御システムを提供する。
【解決手段】ブレーキ操作量に基づいて、マスタシリンダ圧を制御するマスタシリンダ圧制御装置と、各車輪のホイールシリンダ圧を制御するホイールシリンダ圧制御装置と、マスタシリンダ圧を算出するための信号を検出するマスタシリンダ圧検出装置と、を有し、マスタシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてマスタシリンダ圧を制御し、ホイールシリンダ圧制御装置は、マスタシリンダ圧検出装置で検出された検出結果に基づいてホイールシリンダ圧を制御するブレーキ制御システム。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中において第1の電磁弁の動作態様を調整することにより、車両の挙動の更なる安定化に貢献できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において、圧力センサからの検出信号に基づきホイールシリンダ内の実WC圧Pwc_rを取得すると共に、増圧弁及び減圧弁の駆動態様に基づきホイールシリンダ内の推定WC圧Pwc_eを取得する。そして、ECUは、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差がある場合、実WC圧Pwc_rが推定WC圧Pwc_eに近づくように、増圧弁に供給される指令電流値Idを調整する(第8のタイミングt18〜第9のタイミングt19)。
(もっと読む)
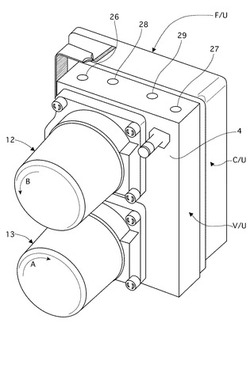
車両用ブレーキ液圧制御装置
【課題】基体の大型化を回避しつつ好適にダンパを配設することができる車両用ブレーキ液圧制御装置を提供する。
【解決手段】ブレーキ液圧を制御する制御弁手段Vと、一対のポンプ6と、一対のポンプ6を駆動するモータ200と、が共通の基体100に配置されてなり、基体100の一方の面に制御弁手段Vが装着されるとともに、基体100の一方の面とは反対側となる他方の面にモータ200が取り付けられた車両用ブレーキ液圧制御装置であって、基体100の他方の面におけるモータ200の取付面201に、ダンパを構成するためのダンパ穴37が開口していることを特徴とする。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中において第1の電磁弁の動作態様を調整し、車両の挙動の更なる安定化に貢献できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中において、圧力センサからの検出信号に基づきホイールシリンダ内の実WC圧Pwc_rを取得すると共に、増圧弁及び減圧弁の駆動態様に基づきホイールシリンダ内の推定WC圧Pwc_eを取得する。そして、ECUは、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差がある場合(第7のタイミングt17)、差圧推定値ΔPdと増圧弁に対する指令電流値Idとの関係を示す特性マップを、実WC圧Pwc_rと推定WC圧Pwc_eとの間に差が小さくなるように補正する。
(もっと読む)
車両用ブレーキ制御装置
【課題】ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御が行えるようにする。
【解決手段】差圧制御弁によって規定差圧を発生させつつ、各規定差圧に対応したポンプ漏れモータ回転数を求め、規定差圧に対するポンプ漏れモータ回転数特性を記憶する。この規定差圧に対するポンプ漏れモータ回転数特性を利用して、運動挙動制御によってモータを駆動するときには、ポンプ漏れを加味したモータ目標回転数にてモータを駆動する。これにより、ポンプ漏れが発生していても、ポンプ漏れが発生していない場合と同じ応答性で目標差圧を発生させることが可能となる。したがって、差圧制御弁によって目標差圧を発生させることで、車両の運動挙動制御を行う車両用ブレーキ制御装置において、ポンプ漏れ量を加味してポンプ漏れが無い場合と同様の運転挙動制御を行うことが可能となる。
(もっと読む)
車両の制動制御装置
【課題】アンチロックブレーキ制御中に運転手によるブレーキ操作が変化しても、その変化に適切に対応した制動制御を実行できる車両の制動制御装置を提供する。
【解決手段】ECUは、ABS制御中にダブルブレーキが検出された場合(第6タイミングt16)、車輪に対応して設けられたホイールシリンダ内のWC圧の増圧速度が速くなるように、ホイールシリンダ内のWC圧を増圧させる際に開動作する増圧弁に対する指令電流値Idを調整する。
(もっと読む)
車両の重心の高さを推定する方法
本発明は、各々少なくとも2つの車輪を有する少なくとも前車軸及び後車軸を備える車両の重心の高さを推定する方法に関し、前記方法は、a)実質的に同じ勾配を有する道路部分に沿って発生する第1制動時間及び第2制動時間であって、該第1制動時間及び該第2制動時間によって、異なる車両減速が起こる両制動時間を決定してから、両制動時間において、少なくとも以下の変数、−車両の加速(Acc)、−前車軸及び後車軸についての車輪スリップ率(WSR)、−前車軸及び後車軸の各々での制動力(Bkf)又は制動トルク、又はその比(K)、並びに−対応する道路部分の勾配(Slp)を推定するステップと、b)両方の時間に実施されるステップa)の推定値のみを用いて、車両の重心高さ(H)を推定するステップとを含む。 (もっと読む)
車両制御装置
【課題】 車両挙動変化に対するショックアブソーバの減衰力特性の制御の遅れを抑制することができる車両制御装置を提供すること。
【解決手段】 ホイルシリンダ液圧が高くなるほど減衰力特性をハードに設定するようにした。
(もっと読む)
車両制動装置
【課題】 制動距離を抑制することができる車両制動装置を提供すること。
【解決手段】 前後加速度と推定した摩擦係数とに基づいて目標ホイルシリンダ液圧を算出する目標ホイルシリンダ液圧算出手段と、車輪がロックしそうなときにホイルシリンダ液圧を減圧し、ホイルシリンダ液圧の減圧後に、目標ホイルシリンダ液圧となるようにホイルシリンダ液圧を増圧し、ホイルシリンダ液圧の増圧後に、目標スリップ率となるようにホイルシリンダ液圧を増減圧するホイルシリンダ液圧制御手段とを設けた。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
141 - 160 / 577
[ Back to top ]