
Fターム[3D246HA57]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 乗員、乗降状態 (122)
Fターム[3D246HA57]の下位に属するFターム
シートベルト装着状態 (18)
シート位置 (5)
ドア開閉 (24)
Fターム[3D246HA57]に分類される特許
21 - 40 / 75
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
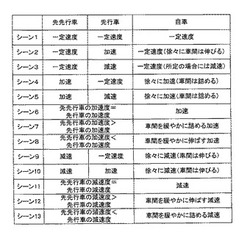
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
前面衝突時オーバーラップ量制御装置

【課題】前面衝突時オーバーラップ量制御装置に関し、運転者の操舵操作等による衝突回避の可能性を確保しながら、衝突した場合の運転者の衝突被害を軽減することができるようにする。
【解決手段】自車両2の前方に衝突可能性のある障害物3が検知された場合に自車両2を横移動させ、障害物3との前面衝突時のオーバーラップ量を制御する装置において、自車両前部に運転者以外に乗員がおらず、また、運転者による衝突回避とみなせる操舵操作がなく、また、自車運転席前部Aを含むオーバーラップ部分OLでの障害物3との衝突が予測され、さらに、自車両2を横移動させた際オーバーラップ部分OLのオーバーラップ量がゼロになる回避スペースがあると判断された場合に、上記オーバーラップ量をゼロにする方向に自車両2を横移動させる。
(もっと読む)
車両緊急停止装置
【課題】車両緊急停止装置に関し、乗客の誤りや故意で作動することなく、運転者の異常を検知したときに限り乗客の応答動作に基づいて車両を自動的に緊急停止することができるようにする。
【解決手段】運転者の異常を検知する運転者状態検知手段10と、運転者状態検知手段10が運転者の異常を検知したときに運転者の異常を車内及び車外に報知する車内用報知手段3及び車外用報知手段6,7と、乗客の応答動作に基づいて乗客の車両停止要求を検知する乗客側停止要求検知手段4,5と、車両を自動的に制動させる自動制動手段8と、運転者状態検知手段10によって運転者の異常が検知され且つ乗客側停止要求検知手段4,5によって乗客の車両停止要求が検知されたときに、緊急停止の必要があると判断して自動制動手段8に制動指示を行なう制御手段20とを備える。
(もっと読む)
居眠り判定装置及びプログラム並びに警報出力装置及びプログラム
【課題】短時間で正確に居眠りを判定する。
【解決手段】居眠り判定装置は、被験者の眼球位置を検出する眼球運動検出部21と、検出された被験者の眼球位置に基づいて、緩徐眼球運動を検出する緩徐眼球運動算出部26と、緩徐眼球運動が検出された場合に、前記被験者は居眠り状態であると判定する居眠り判定部34と、を備えている。
(もっと読む)
同軸二輪車
【課題】より安全性を高めた同軸二輪車を提供すること。
【解決手段】本発明にかかる同軸二輪車10は、搭乗者が足を載せるステップ1a,1bを有し、同軸上に配置された一対の車輪2a,2bを駆動制御することにより、移動する。当該同軸二輪車10は、搭乗者の膝の屈伸状態を検出し、検出信号を出力する屈伸状態検出機構8と、検出信号に含まれる屈伸状態の情報に基づいて、減速させる減速手段として機能する制御部5やブレーキ11を備えている。
(もっと読む)
ドライバ状態監視装置、及び衝突制御システム
【課題】ドライバモニタコンピュータのデータ処理負荷を軽減すると共に、ドライバモニタコンピュータから発生する熱により車体に悪影響を与えることを防止したドライバ状態監視装置、及び衝突制御システムを提供する。
【解決手段】障害物を検出するミリ波レーダ102と、ドライバモニタカメラ104から取得するドライバの顔画像情報を用いて、ドライバの顔向き状態及び眼の開閉状態の情報を取得するドライバモニタECU105と、ミリ波レーダ102で検出された情報を用いて障害物までの衝突予測時間を演算すると共に、衝突予測時間が所定の閾値以下となる場合においてのみ、ドライバモニタECU105に作動開始の信号を送信するドライバサポートECU103とを備え、ドライバモニタECU105は、ドライバサポートECU103からの作動開始の信号を受信した場合にのみ、ドライバモニタカメラ104を用いたドライバ状態監視の処理を開始する。
(もっと読む)
居眠り防止装置
【課題】より快適に運転者を覚醒させる。
【解決手段】制御装置16は、車室内カメラ10aにより撮影された運転者の顔の撮影画像に基づいて運転者の眠気の強さの度合いを推定し、運転者の眠気の強さの度合いを示す眠気度を特定する。そして、運転者の眠気度が大きいほど運転者を覚醒させる度合いが強くなるように、運転者に異なる種類、異なる強さで刺激を与えることが可能な各装置12〜15、20〜22を制御する。
(もっと読む)
車両の制動装置
【課題】車両の衝突を検出する衝突センサと、電動モータにより駆動される電動ブレーキ機構を作動させて車輪制動を行う電動パーキングブレーキ装置と、衝突センサからの信号を基に、電動パーキングブレーキ装置の作動を制御するECUと、を備えた車両の制動装置において、車両が停車中に対象物と衝突した場合における該車両の2次衝突の防止と車室内の乗員保護との両立を図ろうとすることにある。
【解決手段】上記対象物と車両との距離を検出するためのレーザセンサを設けておき、ECUにおいて、該レーザセンサからの信号を基に、該車両に対象物が衝突すると予測したときには、EPB装置の車輪制動力を増加させ、その後に、上記衝突センサにより衝突が検出された後は、EPB装置の車輪制動力を該衝突時の衝撃加速度の大小応じて制御するようにした。
(もっと読む)
車両の乗客監視装置
【課題】車室内における座席に着座していない乗員の状態を識別し、乗客の年齢等の識別信号によって、座席に着座していない乗員の年代に対応した状態を検知し、かかる識別信号に対応した運転制御ができる車両の乗客監視装置を提供する。
【解決手段】車両の車室内における乗員の動きを検知して、車両内の乗員の状況を監視する車両の乗客監視装置において、前記車室内における乗員の状況を検知する乗員状態検知装置と、該乗員状態検知装置からの乗員状況検知信号を受信して該乗員状況検知信号から座席に着座していない乗員を識別すると、該乗員識別信号を表示警報装置を介して運転者に検知させるとともに、前記車内の不安定状態を識別するとエンジン制御装置及びブレーキ制御装置をそれぞれ制御して前記車両の走行状態を加減する制御装置とを備える。
(もっと読む)
ドライバ状態検出装置、車載警報装置、運転支援システム
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
電動パーキングブレーキシステム
【課題】パーキングブレーキ(制動機構)が制動状態であることが望ましい状態のとき(乗員が車室外にいるとき)は、自動的に制動状態にすることにより安全性を向上させた電動パーキングブレーキシステムを提供する。
【解決手段】本発明の電動パーキングブレーキシステムは、車両の車輪を制動する制動機構4と、制動機構を作動させる電動アクチュエータ6と、この電動アクチュエータを作動させ制動機構を制動状態にすると共にこの制動状態を解除する制御ユニット8と、車室内の乗員の有無を検知する乗員検知手段10,12,14,16と、を有し、制御ユニットは、乗員検知手段により乗員が車外であると判定されると、電動アクチュエータを作動させて制動機構を制動状態にする。
(もっと読む)
車両制御装置
【課題】運転時の状況にあわせて最適な運転制御を行い、十分に安全性を確保することのできる車両制御装置を提供する。
【解決手段】自車両の対向車線横断時、すなわち、右折時に自車両の進行方向前方に存在する物体と衝突する可能性が高い場合であって、助手席の乗員が検出された場合、制御部13は、助手席乗員検出部6によって乗員が検出された場合は制動制御を行い、助手席の乗員が検出されなかった場合は制動制御の抑制あるいは中止を行うことができる。これにより、助手席に乗員が存在する場合は制動制御が抑制あるいは中止されることによって、対向車線における対向車との衝突から助手席乗員を保護することができる一方、クラッシャブルゾーンを十分確保することのできる場合、すなわち助手席に乗員が存在しない場合は、制動制御を行うことによって、進行方向の前方に存在する物体との衝突を確実に回避する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
運転支援装置
【課題】運転支援装置に対する運転者の依存や過信を抑制する。
【解決手段】この運転支援装置10では、ECU13において、自車両1の目標経路が演算されると共に、自車両1の走行状態に基づいて将来経路が推定され、これら目標経路及び将来経路に基づいて、自車両1における運転者の回避操作の適否及び回避操作量の適否が判定される。回避操作が適切で且つ回避操作量が不適切と判定された場合には、走行支援装置17がECU13で制御されて走行支援が実行される一方、回避操作が不適切と判定された場合には、警報装置16がECU13で制御されて警報が発せられる。つまり、運転者の回避操作が適切ではあるものの回避操作量が不適切の場合にのみ走行支援が行われ、回避操作が不適切の場合、運転者自身による適切な回避操作が警報で促されることとなる。
(もっと読む)
運転支援装置
【課題】ドライバの運転意思低下時に適切な運転支援制御を行う運転支援装置を提供する。
【解決手段】自車両前方の環境を認識して操舵機構に操舵力を付与する操舵制御、及び、自車両を減速させる減速制御を行う運転支援装置を、自車両の走行車線を認識する車線認識手段110と、走行車線内に設定された目標走行位置に沿って自車両が走行するように目標操舵力を設定する目標操舵力設定手段140と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段160と、自車両を減速させる減速制御手段190と、ドライバの運転意思低下を判定する運転意思判定手段180とを備え、操舵制御手段は、運転意思低下の判定に応じて操舵力の付与を中止し、減速制御手段は、運転意思低下の判定に応じて自車両を減速させる構成とする。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
車両制御装置
【課題】カーブなどにおいて車両の道路逸脱の可能性を抑制するとともに運転者の操舵に関する意思も十分に考慮する車両制御装置を提供する。
【解決手段】旋回状態変更指令に基づいて旋回状態を変更する旋回状態変更機構を備えた車両制御装置。車両の進行方向に存在するカーブの形状を含むカーブ特性情報と、運転者の視線に関する視線情報とを入力して、これらの情報に基づいて旋回状態変更機構1へ旋回状態変更指令を出力するカーブ走行評価手段50が備えられている。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
駐車ブレーキ制御装置
【課題】駐車ブレーキにおけるロック制御時に、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなること等を防止する。
【解決手段】駐車ブレーキにおけるロック制御時に、ドライバのブレーキペダルの操作に基づくサービスブレーキにより発生させられるW/C圧が大きい場合(ステップ205)、W/C圧が目標W/C圧上限値TPWCUよりも低下させる(ステップ220)。これにより、サービスブレーキにより発生させられる大きなW/C圧によってパッド磨耗が大きくなることを防止できる。また、キャリパやブレーキ機構の体格重量等が大きくなることを防止でき、キャリパやブレーキ機構の小型化を図ることが可能となる。
(もっと読む)
21 - 40 / 75
[ Back to top ]