
Fターム[3D246HA57]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 乗員、乗降状態 (122)
Fターム[3D246HA57]の下位に属するFターム
シートベルト装着状態 (18)
シート位置 (5)
ドア開閉 (24)
Fターム[3D246HA57]に分類される特許
1 - 20 / 75
電動ブレーキ装置
【課題】 駐車時において、制動力を解除することなく、簡単な構成で凍結を確実に防止することができる電動ブレーキ装置を提供する。
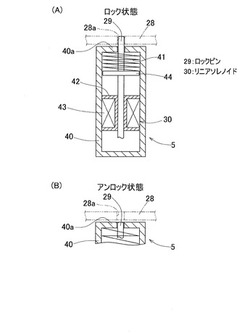
【解決手段】 この電動ブレーキ装置は、電動モータと、制動力負荷機構と、ロック機構5と、車両の外気温度を検出する温度センサと、凍結防止通電手段とを備える。ロック機構5は、ロックピン29と、ロックピン29をアンロック状態に付勢する付勢手段41と、この付勢手段41による付勢力に抗してロックピン29をロック状態に切換え駆動するリニアソレノイド30とを有する。凍結防止通電手段は、制動力負荷機構が制動力を負荷し、且つ、ロック機構5がロック状態のとき、温度センサが、設定された電動ブレーキ装置の凍結直前の温度を検出すると、リニアソレノイド30に通電を開始するように制御する。
(もっと読む)
電動ブレーキ装置

【課題】 駐車時において、制動力を解除することなく、簡単な構成で凍結を確実に防止することができる電動ブレーキ装置を提供する。
【解決手段】 この電動ブレーキ装置は、電動モータ2と、制動力負荷機構4と、ロック機構5と、車両の外気温度を検出する温度センサ6と、凍結防止通電手段7とを有する。凍結防止通電手段7は、制動力負荷機構4が制動力を負荷し、且つ、ロック機構5がロック状態のとき、温度センサ6が、設定された電動ブレーキ装置の凍結直前の温度を検出すると、電動モータ2に通電を開始するように制御する。
(もっと読む)
異常時対応運転制御の要否判定方法および異常時対応運転制御の要否判定に基づく運転制御装置
【課題】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を的確に判定する方法を提供し、また該判定を異常時対応運転制御の的確な始動+に生かす。。
【解決手段】運転者の体調に異常があるときに実行する異常時対応運転制御の要否を運転者の体より及ぼされる押圧力に基づいて判定し、その際、運転者の姿勢の特徴に応じて要否判定を異ならせる。押圧力としては、運転者の脊部より及ぼされる押圧力、臀部より及ぼされる押圧力、左足より及ぼされる押圧力の3者から選択された押圧力を使用する。運転者による異常時対応運転制御の始動は、上記の要否判定が要と判定されたとき許可する。
(もっと読む)
車両用ブレーキ制御装置及び制御方法
【課題】車両に二次衝突が発生して前突用エアバッグが作動した場合であっても乗員に強い衝撃を加えることを回避する。
【解決手段】乗員センサ5、及びシートベルトセンサ4の検出信号に基づき、運転席及び助手席に搭乗している全ての乗員がシートベルトを装着しているか、或いは、少なくとも一人がシートベルトを装着していないかを判断する。全ての乗員がシートベルトを装着している場合には、一次衝突が発生した際に第1の減速度でブレーキ22を作動させる。また、少なくとも一人がシートベルトを装着していない場合には、第1の減速度よりも低い第2の減速度でブレーキ22を作動させる。従って、シートベルトを装着していない乗員がブレーキ22作動時の慣性力により、シートの前方に移動する可能性を低くすることができ、車両に二次衝突が発生した際に、前突用エアバッグが展開して乗員に大きな衝撃を加えるというトラブルの発生を回避することができる。
(もっと読む)
車両用緊急停止装置
【課題】運転者が運転操作を継続できない非常時に、運転者以外の乗員が即座に車両を緊急停止させることができるようにしながら、その緊急停止の指示が誤ってなされた場合には、車両の緊急停止動作を円滑に解除する。
【解決手段】車両用緊急停止装置100は、緊急停止スイッチ102を有し、この緊急停止スイッチ102が操作されたときに車両を緊急停止させる。ただし、このような緊急停止スイッチ102は、誤操作される可能性もあるので、運転者によって操作されるアクセルペダルの動作状態に基づき、車両の運転者が運転操作を行ないうる状態であるか否かを判断し、車両の運転者が運転操作を行いうる状態であると判断された場合には、緊急停止スイッチ102の操作がなされたとしても、その緊急停止スイッチ102の操作に基づくブレーキの作動を停止させる。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
車両
【課題】介助者の意図に反して移動することを防止できる車両を提供する。
【解決手段】車両10は、後輪16a,16b、クラッチユニット50、スプロケット52、クランク70、およびスイッチユニット106を備える。スプロケット52は、クラッチユニット50のかみ合い部材132に連結される。クランク70の回転力は、スプロケット52およびクラッチユニット50を介して後輪16bに伝達される。介助者がスイッチユニット106の第1操作部材108を操作することによって、スプロケット52とかみ合い部材132との連結が解除される。これにより、クランク70から後輪16bへの回転力の伝達が遮断される。また、スプロケット52からかみ合い部材132に与えられる力が大きくなることによってもスプロケット52とかみ合い部材132との連結が解除される。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
制動装置
【課題】運転者に違和感を与えることがなく、またペダル踏み間違いやシフトレバーの入力ミス等による運転者の意思に反した車両挙動を高精度に検出するとともに、最適なタイミングで最適な制動力を付与できる制動装置を提供する。
【解決手段】走行状態判定部が前進位置を判定するとともに、アクセルペダルの踏み込み速度が第1速度閾値Vf以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに所定制動力で車両を制動し、走行状態判定部が後退位置を判定するとともに、アクセルペダルの踏み込み速度が第2速度閾値Vb以上であることを判定し、かつ驚愕状態判定手段が運転者の驚愕状態を検出したときに、所定制動力で車両を制動することを特徴とする。
(もっと読む)
軌陸作業車の逸走防止装置
【課題】軌道走行モードで運転手が駐車ブレーキをかけ忘れて運転席から離れた場合の軌陸作業車の逸走防止装置において、運転席に運転手が居るか否かを、運転手に負担をかけることなく検出できるようにするとともに、その検出を確実に行えるようにする。
【解決手段】タイヤ車輪12による道路走行モードと鉄輪31による軌道走行モードとを選択して切り換え得るようにした軌陸作業車において、運転キャビン4内に運転席41に運転手が居るか否かを検出するためのレーザーセンサ9を設け、鉄輪31に対する制動装置として、鉄輪ブレーキ35を手動で作動させる通常制動装置6とは別に鉄輪ブレーキ35を電気的に作動させる補助制動装置7を備えているとともに、制御手段10により、レーザーセンサ9が運転席41に運転手が居ないことを検出しているときは補助制動装置7に対して制動力を発生させるように制御するようにしている。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両の停止保持制御装置
【課題】 停止保持制御によって停止している車両からのドライバの降車を防止することができる停止保持制御装置を提供する。
【解決手段】 停止保持ECU1は、停止保持制御を行っている間にドライバの降車意思を降車意思判定部1で判断する。ここで、ドライバの降車意思があると判断した場合には、制動力低下制御を行う。制動力低下制御では、車両に付与する制動力を低下させるとともに、ドライバに対して警報を発する。また制動力を低下させる際には、徐々に制動力を低下させる。
(もっと読む)
車両の監督されていない動作を防止する方法およびシステム
緊急制動装置
【課題】簡易な構成で、衝突の可能性を確実に検出可能とする。
【解決手段】運転者における筋電位の発生を検出し、車両の制動装置を動作せしめるよう構成されてなる緊急制動装置であって、車両のハンドル1aに筋電位計101が設けられ、筋電位計101により検出された筋電位が所定の判定レベルLs’を超えた際に、ホールシリンダ104を動作せしめるよう構成されてなり、筋電位計101は、アースに接続されたアース側電極と、アースから分離された正電位電極がハンドルの把持部1aに設けられ、正電位電極に筋電位が得られるよう構成されたものとなっている。
(もっと読む)
リスク回避支援装置
【課題】自車両と周囲車両との衝突を確実に回避することができるリスク回避支援装置を提供する。
【解決手段】 リスク回避支援装置のECUは、自車両と先行車両及び後続車両との車間距離、先行車両及び後続車両の走行挙動(ふらつき等)に基づいて、自車両が先行車両に追突するリスク(前衝突リスク)と自車両が後続車両に追突されるリスク(後衝突リスク)を演算し、これらの衝突リスクが等しくなるように、先行車両及び後続車両に対する自車両の車間位置を求め、これに応じてアクセル制御部8及びブレーキ制御部9を制御する。また、ECUは、先行車両の走行挙動に基づいて、自車両が先行車両を追い越すリスク(追越リスク)を演算し、この追越リスクが前衝突リスクよりも低いときに、自車両が先行車両を追い越すようにアクセル制御部8及びステアリング制御部10を制御する。
(もっと読む)
車両制御システム
【課題】ドライバの覚醒度が低い場合であっても、車両挙動制御装置本来の性能を十分に発揮させることができる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物が接近したときに当該障害物との接触を回避するために前記車両挙動制御装置を制御する障害物回避制御手段と、前記障害物との接触を回避した後に前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両安定化制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記障害物回避制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を増大させ、前記車両安定化制御手段は、前記覚醒レベル判定部32により判定された覚醒度が低いときほど前記車両挙動制御装置の制御量を減少させる。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
1 - 20 / 75
[ Back to top ]