
Fターム[3D246HA98]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 重量 (143) | 輪荷重、軸荷重 (77)
Fターム[3D246HA98]に分類される特許
1 - 20 / 77
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
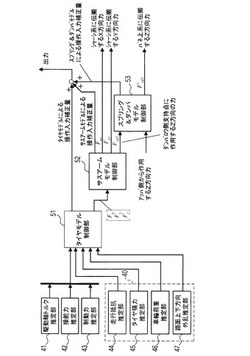
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両のブレーキ制御装置

【課題】車両旋回時の車体の姿勢変化を早期に検知して姿勢変化を早期に抑制することによって車両の走行安定性を高めることができる車両のブレーキ制御装置を提供すること。
【解決手段】車輪速センサ17によって検出される各車輪5L,5R,6L,6Rの速度と操舵角センサ21によって検出された操舵角に基づいて算出される目標ヨーレートとヨーレートセンサ20によって検出される実ヨーレートとの偏差が閾値を超えるとオーバーステアと判断して旋回外側の駆動輪(前輪5L,5R))にアクティブブレーキを掛けることによって旋回時の車体の姿勢変化を抑制するスタビリティ制御を行う車両のブレーキ制御装置(ECU16)において、旋回内側の非駆動輪(後輪6L,6R)の浮き上がりが検出されると、前記スタビリティ制御を開始する目標ヨーレートと実ヨーレートとの偏差の閾値を小さい値に変更する。
(もっと読む)
車両の運転支援制御装置
【課題】降坂時定速走行制御による定速走行を、たとえエンジンブレーキでは制動力が不足するような領域でも精度良く安定して行うことができ、ドライバに対して的確な路面情報を伝えつつ、変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を実行する際は、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定車速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、制動力が不足すると判定した場合は、Nレンジ位置にさせると共に、車輪の接地荷重配分に応じて不足する制動力を設定する。また、制動力が不足すると判定した場合には、トランスファクラッチトルクTlsdを略0に近い値に設定させ、制動力が十分であると判定した場合には車輪の接地荷重配分に応じて設定させる。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
車両用制動力制御装置
【課題】制動装置の失陥の有無を正確に判定すると共に、失陥があるときには余分なヨーモーメントの増大や車両の減速度の低下が抑制されるよう後輪の制動力を制御する。
【解決手段】ダイヤゴナル二系統の制動装置を有し、制動時に前輪に対する左右後輪の車輪速度の関係が目標の関係になるよう左右後輪の制動圧を個別に制御することにより制動力の前後輪配分制御を行う制動力制御装置。一方の系統の一方の車輪と他方の系統の一方の車輪との間の車輪速度の差の大きさ、又は一方の系統の他方の車輪と他方の系統の他方の車輪との間の車輪速度の差の大きさが閾値を越えるか否かを判定する(S170、270)。越えるときには、左右後輪のうち車輪速度が高い方の車輪を含む系統が失陥していると判定し、他方の後輪について制動力の前後輪配分制御による制動圧の低減を行わない(S190、290)。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
荷重測定装置付転がり軸受ユニット
【課題】外輪3とハブ4との間に加わる荷重を、変位センサ等、荷重測定専用の部品を使用せずに測定自在な構造を実現する。
【解決手段】上記ハブ4に、特性を円周方向に関して交互に且つ等間隔に変化させたエンコーダ12を、このハブ4と同心に支持固定する。上記外輪3に支持したセンサ13の検出部を、このエンコーダ12の被検出面に近接対向させる。この被検出面に設けた第一、第二両被検出部の幅寸法は、検出すべき荷重が作用する方向に連続的に変化する。この荷重の変化に伴って、上記センサ13の出力信号が変化するパターンが変わるので、このパターンを観察する事により、上記荷重を求める。上記出力信号は、上記ハブ4の回転速度を求め、ABSやTCSの制御にも利用する。
(もっと読む)
センサ付き転がり軸受装置
【課題】回転体の回転角度の検出精度を高め、回転同期信号を確実に除去することができるセンサ付き転がり軸受装置を提供する。
【解決手段】本発明のセンサ付き転がり軸受装置は、回転体の変位を検出する変位センサ装置20を搭載している。また、回転体が所定角度回転する毎にパルスを発生させるABSセンサ装置30と、演算装置40とを備え、演算装置40は、パルスが発生するタイミングで回転体の回転角度を求めるとともに、パルス発生間隔に基づいて回転角速度を求め、パルスの合間で次のパルス発生までの間は、当該回転角速度に基づいて経過時間に応じた回転角度を推定し、得られた回転角度に基づく回転同期信号を、変位センサ装置20の出力信号から除去する。
(もっと読む)
車両の軸重移動装置
【課題】車両の軸重移動装置に関し、従動軸から駆動軸への軸重移動時に従動輪のブレーキロックを確実に防止することができるようにする。
【解決手段】駆動軸と従動軸からなる後2軸の車両に備えられ、従動軸にかかる軸重を駆動軸に移動させる軸重移動装置において、従動軸から駆動軸へ軸重が移動している場合に、従動軸が枢支する従動輪に伝達されるブレーキ力をカットするブレーキカット手段41を備える。
(もっと読む)
車両のブレーキ制御装置
【課題】勾配センサ等を設けたり、複雑な演算を要することなく、坂道発進補助装置の制動力解除を適切なタイミングで行うことのできる車両のブレーキ制御装置を提供すること。
【解決手段】坂道発進補助機能により制動力が保持されている状態から発進する際に、車軸トルクが、発進段に応じて設定された車軸トルク規定値以上となったときに、坂道発進補助機能を解除する(S4、6)。
(もっと読む)
車両運動制御装置
【課題】加速旋回を含んだ走行状態にある車両の加速性を維持しつつ、車両を安定して走行させることが可能な車両運動制御装置の提供。
【解決手段】車両Mの駆動輪Wfl,Wfrの空転量が所定の閾値よりも大きい場合、ブレーキ制御ECU26は通常の空転抑制制御を実行し、空転傾向にある駆動輪Wfl,Wfrに制動力を付与する。車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回内側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも大きくし、旋回内側の駆動輪Wfl,Wfrへの制動力の付与を抑制し、その空転を許容する。また、車両Mの加速旋回状態が検出され、かつ、アンダステア状態が検出された場合、旋回外側の駆動輪Wfl,Wfrの空転量の閾値を通常の空転抑制制御時の閾値よりも小さくし、外側の駆動輪Wfl,Wfrへの制動力の付与を増大させる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ABS制御中に車両挙動制御を実行する場合に、ブレーキ液圧の急変を抑制し、ブレーキフィーリングを向上させることを目的とする。
【解決手段】車両用ブレーキ液圧制御装置は、車両の旋回状態に基づいて制御対象車輪を加圧するのに必要な加圧液圧を算出する加圧液圧算出部121Aと、車両の旋回による横加速度を取得し、当該横加速度に基づいて制御対象車輪が存在する前後位置における左右の車輪に掛かる荷重比を算出する荷重比算出部121Bと、車両挙動制御の制御対象車輪と前後位置が同じで左右逆側の車輪の推定液圧を制御対象車輪の基本液圧とし、当該基本液圧を荷重比で補正した修正基本液圧を算出する修正基本液圧算出部121Cとを備え、アンチロックブレーキ制御中に車両挙動制御を実行する際には、修正基本液圧に加圧液圧を加算することで、目標液圧を算出するように構成される。
(もっと読む)
車両挙動制御装置
【課題】運転者への違和感が小さくできる車両挙動制御装置を得る。
【解決手段】ハンドルの操舵角を検出又は推定する操舵角検出手段と、車両の速度を検出する車速検出手段と、操舵角検出手段の出力である操舵角の0近傍に制御不感帯を有し、操舵角検出手段の出力である操舵角に対して、低車速側では制御不感帯幅を大きく、高車速側では制御不感帯幅を小さく設定し、車速検出手段の出力である車速に応じた制御不感帯幅を出力する制御不感帯幅設定器と、操舵角検出手段の出力である操舵角の絶対値が制御不感帯幅設定器の出力である制御不感帯幅で設定される操舵角の絶対値の上限より大きい場合に車両の減速制御用出力を発生する車両減速制御実施判断器とを備え、車両減速制御実施判断器の前記減速制御用出力により車両の減速制御を実施する
(もっと読む)
車両制動装置
【課題】 制動距離を抑制することができる車両制動装置を提供すること。
【解決手段】 前後加速度と推定した摩擦係数とに基づいて目標ホイルシリンダ液圧を算出する目標ホイルシリンダ液圧算出手段と、車輪がロックしそうなときにホイルシリンダ液圧を減圧し、ホイルシリンダ液圧の減圧後に、目標ホイルシリンダ液圧となるようにホイルシリンダ液圧を増圧し、ホイルシリンダ液圧の増圧後に、目標スリップ率となるようにホイルシリンダ液圧を増減圧するホイルシリンダ液圧制御手段とを設けた。
(もっと読む)
ブレーキ装置
【課題】実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供する。
【解決手段】本ブレーキ装置は、車輪の角速度を検出する車輪角速度検出部と、車輪の接地荷重を推定する接地荷重推定部と、前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、制動時の前記角速度と前記接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、当該前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、前記制動力目標値と前記前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、前記制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える。
(もっと読む)
車両運動制御装置
【課題】横転抑制効果をより高くできるようにする。
【解決手段】車両運動制御として横転抑制制御を実行する際に、旋回外側前輪および旋回内側前輪の両方に横滑りを発生させられる制動力となるように目標W/C圧Pto、Ptiを設定し、制動力を増加させる。これにより、旋回外側前輪に加えて旋回内側前輪も横滑りさせることができる。このように、旋回外側前輪だけでなく、旋回内側前輪についても積極的に横滑りさせることで、より車体のロールを抑制することが可能となり、車両の横転を抑制することが可能となる。
(もっと読む)
4輪駆動車のタイヤ力制御装置
【課題】前後駆動力配分制御手段および制動力制御手段を適切に制御することで前後左右全4輪のタイヤ力を最大限活用し、タイヤ限界付近における車両安定性を維持しつつ限界性能を向上させる。
【解決手段】全4輪のうち3輪のタイヤ力が各輪の摩擦円限界値を超えた(飽和した)場合であっても残り1輪でもって3輪トータルのオーバータイヤ力を吸収できる場合は、前後駆動力配分制御部31でもって、左右輪とも飽和している前輪2輪もしくは後輪2輪のオーバータイヤ力の総和だけ飽和していない1輪を有する後輪2輪もしくは前輪2輪に駆動力を移動する。その後、ブレーキ制御部32でもって、各輪のタイヤ力が摩擦円限界値を超えないよう制動力制御する。
(もっと読む)
1 - 20 / 77
[ Back to top ]