
Fターム[3D246HB24]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | ナビ情報 (462)
Fターム[3D246HB24]の下位に属するFターム
自車の位置 (161)
Fターム[3D246HB24]に分類される特許
101 - 120 / 301
車両制御装置
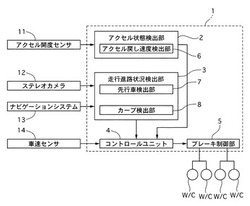
【課題】 ドライバの制動意思に合致した減速開始タイミングを実現できる車両制御装置を提供する。
【解決手段】 コントロールユニット4は、アクセル状態検出部2によりアクセル操作量の減少が検出され、かつ、カーブ検出部8により走行進路にカーブが検出された場合には、ブレーキ制御部5を作動させる。
(もっと読む)
車両走行制御装置

【課題】車両走行制御装置において、停止距離に応じて適正な速度パターンを生成し、燃費の向上を可能とする。
【解決手段】目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、
目標走行経路に沿って速度パターンを生成し、この速度パターンに基づいて車両の走行を制御するように構成し、速度パターンにおいて車両の減速を行う第1減速パターンを生成する第1減速パターン生成手段と、第1減速パターンの継続期間がより長くなるように速度パターンを修正する減速パターン修正手段とを設ける。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
自動ブレーキ装置
【課題】カーブ進入前に、自動ブレーキを実行する車両を運転する運転者の意図を的確に反映する。
【解決手段】カーブ54cへの進入路である直進路54sにおいて、カーブへの進入口である地点Cに到達するまでの間に自動ブレーキが作動して車速が安全速度まで落ちた後の車両10の位置が、カーブの進入口より閾値距離(所定距離)以上離れた位置であった場合に、加速方向の前後Gの検出により運転者の加速意図を検出したとき、自動ブレーキ制御部の設定制動力を減圧させ、制動制御装置及びブレーキアクチュエータを通じて車輪に対する制動力を減圧するようにしたので、運転者の加速意図を的確に反映することができる。
(もっと読む)
車両制御システム及び安全確認判定装置
【課題】ドライバモニタカメラから取得するドライバの視点方向と車外カメラから取得する障害物方向とを照合する際に、ドライバの視点方向の情報を安定化して、ドライバが障害物を認識していないとする誤判定を防止する車両制御システムを提供する。
【解決手段】車両制御システム10は、ドライバの視点方向を所定周期で検出するドライバモニタカメラ34fと、角度座標上でのドライバの視点移動速度を検出する視点クラスタ処理部31bと、ドライバの視点の注視期間を検出する視点同定処理部31cと、視点移動速度と注視期間に基づいて算出されるドライバの視野範囲に、車外カメラ32cで検出された障害物方向が含まれるか否かを判定し、ドライバの視野範囲に障害物方向が含まれないと判定された場合に車両制御の実行が可能な安全確認判定部31とを備える。
(もっと読む)
車両制御装置
【課題】車両総重量や車両重心位置の変化に対応させた適切な車両挙動制御を行うこと。
【解決手段】設定した目標制御量又は/及び目標制御タイミングで車両10の挙動制御を行う車両制御装置において、車両総重量を推定又は検出する重量演算手段1eと、車両重心位置を推定又は検出する重心位置演算手段1dと、車両10の旋回特性を表す旋回特性指数値を車両総重量と車両重心位置に応じて設定する旋回特性指数設定手段1cと、車両の走行状態を表す走行状態量と車両総重量及び車両重心位置に応じた旋回特性指数値とに基づいて車両10が所望の旋回姿勢となる目標制御量又は/及び目標制御タイミングを設定する旋回制御手段1bと、を設けること。
(もっと読む)
運転支援システム
【課題】歩行者などに対する水跳ねが発生しないような浅い水溜りで不要な運転支援が実行されることを防止し、制御精度の向上が図られた運転支援システムを提供する。
【解決手段】路面の高度差に関する情報を取得する路面高度差取得手段11と、降雨を検出する降雨検出手段12と、降雨検出手段12が降雨を検出した場合において路面高度差取得手段11によって取得された路面の高度差が所定値以上である道路上の地点に、運転支援を行う運転支援手段13とを備える運転支援システム1とする。これにより、降雨の有無と路面の高度差とに応じて水溜りができる可能性の高い地点を判定し、この判定された地点に車両が接近する場合に運転支援を行うことが可能となる。その結果、水跳ねが発生しないような浅い水溜りに接近する場合における運転支援の実行を防止することができる。
(もっと読む)
運転支援装置
【課題】 その時の状況に即したより適切な運転支援をおこなう運転支援装置を提供する。
【解決手段】
本発明に係る運転支援装置1は、第1および第2の判定手段として機能するECU2が、対象交差点に進入する自車の車速が、警報を鳴らす車速の閾値である下限車速を上回っていると判定した場合には警報を鳴らし、下限車速以下であると判定した場合には警報を鳴らさない。また、ECU2は、自車の進行方向が直進か否かを判定し、直進でない場合には下限車速を所定の補正値αだけ減らし、直進である場合には下限車速を減らさない。それにより、対象となる交差点に進入する車両が、直進するか否かにより下限車速が変わることとなるため、たとえば対象交差点において右折しようと車両が、直進車両に適用される下限車速以下であっても、下限車速から補正値αを減算した車速よりも高い場合には警報が鳴らされる。
(もっと読む)
運転支援装置
【課題】運転者の走行形態に応じて、適切な運転支援を行うことができる運転支援装置を提供すること。
【解決手段】運転者の運転を支援する運転支援装置において、自車両が走行する道路の車線数が複数である場合、自車両の走行車線を取得する走行車線取得手段と、取得された走行車線に応じて、運転支援内容を決定する運転支援内容決定手段と、を備えることを特徴とする。
(もっと読む)
摩擦装置
【課題】2つの摩擦材間の距離を十分に縮めることができる摩擦装置を提供する。
【解決手段】摩擦装置1は、ブレーキディスク2と、このブレーキディスク2に接触するブレーキパッド3とを備えている。また、摩擦装置1は、ブレーキディスク2とブレーキパッド3との間に存在する気体を吸引する吸引ユニット4を備えている。吸引ユニット4は、ブレーキパッド3に形成され、ブレーキパッド3におけるブレーキディスク2と接触する面に開口する吸入路5と、この吸入路5と接続された吸引管6と、この吸引管6と繋がれた負圧室7とを有している。吸引管6には、開閉弁8が接続されている。さらに、摩擦装置1は、ブレーキペダルがONのときは、開閉弁8を開くように制御し、ブレーキペダルがOFFのときは、開閉弁8を閉じるように制御するECU9を備えている。
(もっと読む)
車両運転支援装置
【課題】擦れや汚れ等のために路面の白線種別を認識できない場合でも、その白線種別を容易に推定して、自律的な車両制御を行えるようにする。
【解決手段】路面状態検出装置1として、リアカメラ6と、自車両の走行車線を区分する白線の種別を認識する白線種別認識部8と、白線種別記憶部9、および白線種別推定部10と、白線種別に基づいて車両制御を行う車両制御装置とを備えている。自車両の現在の走行車線を区分する白線種別を画像処理によりリアルタイムで認識し、その認識した白線種別を走行履歴のかたちで白線種別記憶部9に記憶しておく。白線種別を認識ができないときには、白線種別推定部10が白線種別記憶部9に記憶されている過去の白線種別を現在の白線の種別として推定し、それに基づいて速度制御を行う。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
走行制御目標生成装置
【課題】安全性を確保しつつ走行時間の短縮が実現でき、車両乗員の快適性を向上させ得る走行制御目標生成装置を提供する。
【解決手段】走行制御目標生成装置1は、車両の走行状態変化速度を用いて走行制御目標を生成する。走行制御目標生成装置1は、車両の進行方向に沿った所定領域内に存在する可動障害物を検出する可動障害物検出手段と、可動障害物検出手段によって検出された可動障害物との接触が起こり得るか否かを判定する接触可否判定手段と、接触可否判定手段によって可動障害物との接触が起こり得ないと判定されたときは、接触が起こり得ると判定されたときよりも走行状態変化速度が大きくなる走行制御目標で制御する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】 運転者の意図する旋回挙動を実現できる車両挙動制御装置および車両挙動制御方法を提供する。
【解決手段】 車両の左右後輪に対して左右独立に駆動力を付与可能な駆動力配分制御装置と、各輪に対し独立して制動力を付与可能なブレーキ制御装置と、車両挙動(ヨーレイト)を検出する目標ヨーレイト算出部307と、検出された車両挙動に基づいて車両のアンダーステアとオーバーステアを判断する車両挙動状態判断部310と、車両挙動状態判断部310の判断結果に応じて駆動力を増加し、駆動力配分制御装置を制御する駆動力制御部(駆動力配分算出部311,目標エンジントルク算出部313)およびブレーキ制御装置を制御する目標制動力算出部312と、を備えた。
(もっと読む)
玉突き事故防止装置、及び車体制御方法
【課題】低速走行時や高速道路の渋滞時に後突された場合に発生する玉突き事故を効果的に防止する玉突き事故防止装置を提供する。
【解決手段】前方の障害物を検出する前方ミリ波レーダ202と、後方から接近する車両を検出する後方ミリ波レーダ203と、ブレーキ油圧を制御するブレーキECU205と、後方ミリ波レーダ203における検出情報を用いて後突の可能性を判断すると共に、後突の可能性があると判断する場合には、さらに前方ミリ波レーダ202における検出情報を用いて前方障害物の有無を判断し、前方障害物がある場合にブレーキECU205にブレーキ制御信号を送信する衝突判断ECU204とを備える。
(もっと読む)
車載用報知装置
【課題】車両の運転者に対して回生ブレーキの効率的な利用を促す情報をより効果的に報知するための技術を提供する。
【解決手段】回生教示コンピュータ19は、回生制御コンピュータ20から入力されるブレーキの作動状況に関する情報に基づき、運転者によるブレーキ操作によって減少した運動エネルギ分に相当する制動エネルギのうち、回生ブレーキシステムによる回生によって回収できなかった損失エネルギに関する損失情報を導出する。そして、その導出した損失情報に基づいて、車両の走行前、走行中、走行終了後の各場面において損失エネルギに関する所定の情報を生成し、その生成した情報を運転者に報知する。
(もっと読む)
運転支援装置
【課題】必要な状況にのみ走行支援を行ない、運転者が違和感を覚えることなく自車両の衝突を防止することのできる運転支援装置を提供する。
【解決手段】障害物と自車両Cとの衝突を回避するための衝突回避制御を行なう運転支援装置1において、自車両Cの前方の信号機Sに関する信号機情報に基づいて自車両Cが減速するか否かを予測する予測部22と、減速が予測された場合に衝突回避制御の実行を抑制する制御部23と、を備える。この構成により、自車両Cの減速が予測された場合に、衝突回避制御の実行が抑制される。これにより、自車両Cの減速が予測されたため衝突回避制御の実行は不要と予測される状況で衝突回避制御は抑制されるといったように、信号機情報に基づいて必要な状況にのみ、走行支援としての衝突回避制御が行われ、運転者が違和感を覚えることなく自車両Cの衝突を防止することができる。
(もっと読む)
駆動力制御装置
【課題】車両前方の路面の路面摩擦係数μが低い場合であっても要求減速度(目標減速度)を達成することのできる駆動力制御装置を提供する。
【解決手段】所定距離前方の路面で車両Veに要求される減速度を算出する要求減速度算出手段と、車両Veの現在車速Vpと所定距離前方の路面の路面摩擦係数μとに基づいて、所定距離前方で出力可能な最大減速度を算出する最大減速度算出手段と、最大減速度算出手段によって算出された最大減速度が、所定距離前方の路面で車両Veに要求される減速度よりも小さい場合に、その不足する減速度を車両Veが現在走行している路面で補償する補償手段とを備えている。したがって、所定距離前方の路面において減速度が不足する場合に、車両Veが現在走行している路面でその不足する減速度を補償するから、所定距離前方で目標とする車速Vrに到達させることができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
走行支援装置
【課題】運転者の意思に応じた走行制御を実行できる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車両周辺の環境情報から特定された制御に基づいて自車両が実行可能な走行制御が抽出され、その走行制御が複数存在する場合にその制御因子及び制御内容が運転者に対して表示される。そして、運転者が意図する一の走行制御の選択を受け付け、その一の走行制御が自車両において優先的に実行される。これにより、例えば追従対象や信号機等といった制御因子が複数存在する場合であっても、追従対象の変更や速度の変更等といった走行制御が自動で実行されずに、運転者の意思を確認してから実行されることになる。従って、運転者が不測の車両挙動に違和感を覚えることなく、運転者の意思に応じた走行制御の実行が可能となる。
(もっと読む)
101 - 120 / 301
[ Back to top ]