
Fターム[3D246HB24]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | ナビ情報 (462)
Fターム[3D246HB24]の下位に属するFターム
自車の位置 (161)
Fターム[3D246HB24]に分類される特許
21 - 40 / 301
運転支援装置及び運転支援方法
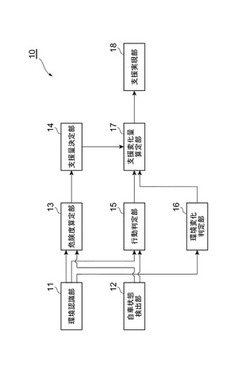
【課題】ドライバーにとって違和感のない運転支援を実行可能な運転支援装置及び運転支援方法を提供する。
【解決手段】自車両V0周囲の状況に応じて支援量決定部14が決定した運転支援量により自車両V0のドライバーの運転支援を行い、運転支援量を決定した後にドライバーによる操舵があったときは、支援量変化量算定部17及び支援実現部18は、運転支援量を決定した後のドライバーによる操舵量に応じた補正量により補正された運転支援量によりドライバーの運転支援を行う。このため、ドライバーにとって違和感のない運転支援が実行される。
(もっと読む)
車両の制御装置

【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
ブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置
【課題】マスタシリンダ内の圧力を検出するための圧力センサを用いることなく、運転手によるブレーキペダルの踏力が高いか否かを判定することができるブレーキペダルの踏力推定装置、ブレーキペダルの踏力推定方法及び車両の制動制御装置を提供する。
【解決手段】ブレーキ用ECUは、車体減速度DVが第1の減速判定値DV_stを超えた時点での車体減速度の変化勾配DDVを第1変化勾配DDV1とし(ステップS86)、Gセンサ値Gが第2の減速判定値G_stを超えた場合に取得された車体減速度の変化勾配DDVを第2変化勾配DDV2とする(ステップS89)。ブレーキ用ECUは、第2変化勾配DDV2が第1変化勾配DDV1以上である場合(ステップS90:YES)に、運転手によるブレーキペダルの踏力が高いと判定する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
運転支援装置
【課題】ドライバの運転操作による目標走行経路に対する車両の追従性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、車両の目標走行経路を生成する目標経路生成部12と、ドライバの体力を判定するドライバ体力判定部13と、ドライバの体力に応じて、アクセルペダルストロークとアクセルペダルアシスト力及びアクセルペダル反力との関係を表すアクセルペダル入出力特性を設定するアクセルペダル特性設定部15と、ドライバの体力に応じて、ブレーキペダルストロークとブレーキペダルアシスト力及びブレーキペダル反力との関係を表すブレーキペダル入出力特性を設定するブレーキペダル特性設定部16とを有している。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
走行計画生成方法および走行計画生成装置
【課題】 車両の搭乗者の乗り心地を十分に向上させることができる走行計画生成方法および走行計画生成装置を提供する。
【解決手段】 走行制御ECU1における走行計画生成部10は、車両の車速に基づいて走行軌跡における最大横加速度および最大横ジャークを設定する。また、設定した最大横加速度および最大横ジャークに基づいて、(最大横加速度×π/2)/最大横ジャークから転舵時間を算出する。これらの最大横加速度、最大横ジャーク、および転舵時間に基づいて走行軌跡を生成する。
(もっと読む)
運転容易性向上システム、運転容易性向上方法、プログラム、媒体
【課題】同一の運転者が異なる車両を連続して使用する場合であっても、後で使用する後車両のドライバビリティを向上させること。
【解決手段】本発明による運転容易性向上システム1は、二の車両2、3のうち先に使用される先車両2での運転情報を取得する取得手段41aと、二の車両2、3のうち後で使用される後車両3の運転性能を運転情報に基づいて変更する変更手段51aとを含むことを特徴とする。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
車両制御装置
【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
走行軌跡作成装置
【課題】見通しの悪いカーブ路を車両が走行する場合であっても、燃費の悪化を抑制することができる走行軌跡作成装置を提供する。
【解決手段】車両1の走行軌跡を作成する走行軌跡作成装置10において、カーブ路の入口部32から出口部34までの形状を認識するカーブ路形状認識手段11と、カーブ路内における、出口部34を見通す地点40を特定する出口部見通し地点特定手段12と、入口部32から出口部見通し地点40及び出口部見通し地点40から出口部34までの車両1の走行軌跡を作成する走行軌跡作成手段13と、を備えること、を特徴とする走行軌跡作成装置10。
(もっと読む)
車両の走行制御装置
【課題】ドライバのフィーリングに合致した加速制御を行うことができる車両の走行制御装置を提供する。
【解決手段】走行制御ユニット5は、自車両1が走行中の車線が追越車線であるか否かを判定し、追越車線を走行中であると判定した場合には、自車速Vの加速側への応答性が、追越車線以外の車線(走行車線)を走行中のときよりも相対的に高くなるよう目標加速度aを設定する。これにより、ドライバのフィーリングに合致した加速制御を行うことができる。
(もっと読む)
制御装置
【課題】坂道において安全にアイドリングストップするための制御を行う制御装置を提供すること。
【解決手段】移動体に備えられ、
前記移動体の停止する位置が坂道であるか否かを判定する制御部を備える制御装置であって、
前記制御部は前記移動体が停止する位置が坂道であるときに、アイドリングストップに関する制御と所定の制御を行うことを特徴とする。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】ドライバの運転傾向を考慮して、効率よく回生ブレーキによる電力の回生が行われるように案内を行うことができる、運転支援装置、運転支援方法、及び運転支援プログラムを提供すること。
【解決手段】運転支援装置50は、回生ブレーキにより回生された電力を特定する回生電力特定部51aと、車両から対象地物までの距離に基づくタイミングで、車両の減速を促す旨の案内を行う案内部51bと、回生電力特定部51aにより特定された、案内部51bが案内を行ってから対象地物を通過するまでに行われたブレーキ操作に応じて回生ブレーキにより回生された電力に基づき、案内部51bが案内を行うタイミングを設定する設定部51cとを備え、案内部51bは、設定部51cにて設定されたタイミングで新たな案内を行う。
(もっと読む)
21 - 40 / 301
[ Back to top ]