
Fターム[3D246HB24]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | ナビ情報 (462)
Fターム[3D246HB24]の下位に属するFターム
自車の位置 (161)
Fターム[3D246HB24]に分類される特許
41 - 60 / 301
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
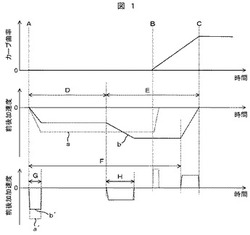
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両用情報処理装置

【課題】ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】運転支援装置10のECU30は、ドライバーの過去の減速操作における減速終了地点の平均値よりも車両の現在位置から遠い地点を車両を減速させるための基準として、交差点等の手前で車両を減速させるための情報処理を行なう。このため、車両を減速させるための基準はドライバーの過去の減速操作における減速終了地点の平均値よりも遠方とされることになる。このため、ドライバーの意図に反して減速終了地点が交差点等の手前となり過ぎて、ドライバーにアクセルを再度踏み込ませる等の無駄な操作をさせることを防止することができる。
(もっと読む)
車両速度制御装置および車両速度制御方法
【課題】 ドライバの速度制御への介入が容易であり、利便性の向上を図ることができる車両速度制御装置および車両速度制御方法を提供する。
【解決手段】 ドライバのアクセル操作状態を検出するアクセル開度センサ110と、ドライバのブレーキ操作状態を検出するマスタシリンダ圧センサ104と、自車両と先行車両との距離を検出するカメラ107と、自車両の走行速度を制御するエンジン112およびブレーキ装置(ブレーキ液圧ユニット101,ブレーキECU102)と、カメラ107により検出された先行車との距離Dcaが速度制御許可範囲内で、かつ、アクセル開度センサ110とマスタシリンダ圧センサ104により検出された操作状態があらかじめ設定された所定の状態の場合、自車両と先行車との相対関係を維持するように速度制御部(エンジン112およびブレーキ装置)を作動させるブレーキECU102と、を備えた。
(もっと読む)
車両運転支援装置
【課題】交差点に進入しようとする車両の運転者の操作を尊重し運転者による操作を妨げないようにする車両運転支援装置を提供する。
【解決手段】交差点60での一時停止見落とし等を原因とする出会い頭シーン等での事故発生シーンを想定すると、一般に、非優先車両12nは車速Vが低く、優先車両12pは車速Vが高いことが推定される。自車12が優先車両(優先側車両)12pで、車速Vが所定値(例えば、20[km])より低い場合には予圧をかけ車速Vが所定値より高い場合では予圧を少なく(ゼロを含む)することで、的確なブレーキ予圧を付与することができる。
(もっと読む)
運転支援システム
【課題】車体速度を所望の速度に維持するよう制御する車速制御が不意に解除されてしまうことを防ぐこと。
【解決手段】アクセルペダルの操作量が増加した後に、ユーザが車速制御の開始を所望すると判定するために予め設定された「車速制御開始範囲」内となった場合には開始指示をエンジンECU2へ出力する。車速制御の実行中に、アクセルペダルの操作量が、ユーザが車速制御の継続を所望すると判定するために予め設定された、車速制御開始範囲を包含する「車速制御継続範囲」内にある場合には解除指示をエンジンECU2へ出力せず、一方、アクセルペダルの操作量が車速制御継続範囲内にはなくなった場合には解除指示をエンジンECU2へ出力する。車速制御継続範囲が車速制御開始範囲を包含するので、何らかの要因でアクセルペダルの操作量が変化しても、操作量が車速制御継続範囲にある限りにおいては車速制御が解除されない。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
車両の電力供給制御装置
【課題】エンジン停止後に再始動条件が成立した場合にエンジンを再始動させるとともに、車両の走行可能状態において特定条件が成立したことを要件として特定制御を実行するものにおいて、エンジンの始動に起因して特定制御が不安定になることを抑制する。
【解決手段】車両10は、スタータ21と、エンジン20の運転中に停止条件が成立した場合にエンジン20を自動停止させるとともに、エンジン停止後に再始動条件が成立した場合にスタータ21によりエンジン20を再始動させるECU33と、車両10の走行状態において特定条件が成立したことを要件としてアンチスキッド制御を実行するABS36と、ナビゲーション装置37及びオーディオ装置38と、バッテリ31とを備える。ECU33は、車両10の走行状態において特定条件が成立しており、且つ所定の再始動条件が成立している場合に、バッテリ31から装置37,38へ供給される電力を遮断する。
(もっと読む)
カーブ進入制御装置
【課題】実際に走行する分岐先道路に適した制動警報を行うことにより、ドライバへの違和感を軽減する。
【解決手段】高速道路の分岐路を進む際のカーブ進入制御装置であって、この装置は、自車前方の本線道路の分岐である分岐情報及び自車位置情報と、走行中の道路を撮像する撮像手段により検出した走行車線情報に基づいて、前方分岐における走行予定車線を推定する走行予定車線推定手段(S30)と、走行予定車線推定手段により推定された走行予定車線に基づいて、制動警報を作動させるか否かを判断する制動警報判断手段(S110)とを備える。
(もっと読む)
車両走行制御方法
【課題】走行中の車両の有する運動エネルギーを最大限に活用した車両走行制御方法。
【解決手段】車両走行区間を、起点および終点を各々信号交差点あるいは一時停止点とする単位走行制御区間に分割する。前記単位走行制御区間毎に、起点からの加速走行・定速走行を行いその後の終点に向けての走行は終点到達条件を満足する範囲内で前記加速走行・定速走行後に車両の有している運動エネルギーを最大限有効利用した惰性走行を行う。また、前記惰性走行時の車両の惰性走行減速度は、惰性走行中の一定時間あるいは一定走行距離毎に算出し以降それが更新されるまでの間の惰性走行可否の判定に利用する。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両の路外逸脱防止制御装置
【課題】どのような車線逸脱量にも対応でき、ポンプモータの作動を必要最低限にして、作動音や振動の発生を抑制し、長寿命化を図る。
【解決手段】白線位置情報に基づいて第1の逸脱量yLを算出し、障害物位置情報に基づいて第2の逸脱量ySを算出し、車両1にヨーモーメントや減速度を発生させて障害物や白線に対する車両の逸脱を防止する制動力Bfi、Bfo、Bri、Broを障害物や白線に対する逸脱量yL、ySを基に算出してブレーキ制御装置10に出力する一方、車速V0と、交差角αからのハンドル角θHの差と、第1の逸脱量yLとに応じてポンプモータ目標回転数設定用逸脱度Kを設定し、該ポンプモータ目標回転数設定用逸脱度Kに応じてブレーキ制御装置10のハイドロリックユニットのポンプモータの目標回転数Rpを設定し、ブレーキ制御装置10に出力してポンプモータの回転数を可変制御する。
(もっと読む)
車両用制動装置
【課題】車両用制動装置において、ドライバの意思確認を適正に行って駐車維持装置の作動を判断することで安全性及び操作性の向上を図る。
【解決手段】車両10の停止状態を維持する停止維持装置としてのディスクブレーキ装置20と、車両10の駐車状態を維持する駐車維持装置としてのパーキングブレーキ装置40とを設け、パーキングブレーキECU54は、ドライバの運転姿勢に基づいて車両10の運転を継続する運転継続意思を判定し、ドライバがディスクブレーキ装置20を作動し、且つ、ドライバに運転継続意思がないと判定したときには、パーキングブレーキ装置40を作動させる。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援のための各種のデバイスに故障が発生した場合であっても適切な運転支援を実現する。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために、対象物及び車両の状況に応じて算出された衝突余裕時間及び対象物が車両の予測進路上に移動する可能性の度合いを示す推定危険度に基づき運転支援形態を判定し、判定された運転支援形態に基づき運転支援のための1つ以上のデバイスを制御することにより運転支援を実施する装置であって、デバイスの故障を検出する故障検出部20と、デバイスによる運転支援が安全に寄与する度合いを示す値である安全寄与率と、故障検出手段により検出された故障デバイスに関する情報とに基づき推定危険度を増加させる危険度増分値算出部12、推定危険度判定部13とを備える。
(もっと読む)
車両の制御装置
【課題】車両の旋回挙動を規定するヨーレート及び車体スリップ角を所望の値に制御する。
【解決手段】前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段を備えた車両を制御する装置は、前記車両の目標運動状態を規定するヨーレート及び車体スリップ角を少なくとも含む車両状態量の目標値を設定する設定手段と、予め設定された、前記車両状態量と前記各々における左右制駆動力差を少なくとも含む状態制御量との相対関係を規定する車両運動モデルに基づいて、前記設定された車両状態量の目標値に対応する前記状態制御量の目標値を決定する決定手段と、前記各々における左右制駆動力差が前記決定された目標値となるように前記制駆動力可変手段を制御する制御手段とを具備する。
(もっと読む)
走行制御装置
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車両制御装置
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
制駆動力制御装置
【課題】車両がコーナを脱出する際のエンジンブレーキや回生ブレーキ等による無駄な減速を抑制し、なおかつ想定以上に下がってしまった車速を回復する際の無駄なエネルギー消費を抑制するために、車両の減速度を徐減することができる制駆動力制御装置を提供することを課題とする。
【解決手段】ECUは、車両のカーブ脱出時に、車両の非旋回時用に設定された減速度である非旋回減速度より小さくなるまで、車両の減速度を減少させる。
(もっと読む)
車両制御装置
【課題】より精度よく、車両の走行制御を行うことのできる車両制御装置を提供すること。
【解決手段】車両1の走行を実現する複数のアクチュエータを、車両1の周辺の状況を検出する走行状況検出手段で検出した情報に応じて制御することにより車両1の走行制御を車両1の周辺の状況に応じて行うことが可能な車両制御装置2において、走行状況検出手段としてカメラ60、レーダー61、カーナビゲーションシステム65等の複数設けられており、これらの複数の走行状況検出手段で検出した複数の情報の信頼度に応じて、エンジン12や自動変速機15、EPS装置35、VGRS38、ブレーキ油圧制御装置50等の複数のアクチュエータのうち、一部のアクチュエータの制御量を制限する。
(もっと読む)
41 - 60 / 301
[ Back to top ]