
Fターム[3D246HB26]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車外情報 (2,668) | 外部装置からの情報 (624) | 路傍、道路、他の車両等からの情報 (133)
Fターム[3D246HB26]に分類される特許
1 - 20 / 133
車両の危険回避支援装置
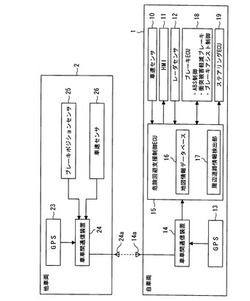
【課題】自車両の前方の他車両における急ブレーキ操作を早期に検出し、車両の運転者による危険回避操作の支援を行なうことができるようにした、車両の危険回避支援装置を提供する。
【解決手段】
他車両2の位置情報と、他車両2のブレーキ操作情報とを含む他車両2の情報を検出する他車両情報検出手段14と、車両1の運転者による危険回避操作を支援する危険回避支援手段18,19とを備え、自車位置情報検出手段13及び他車両情報検出手段14からの情報に基づいて、車両1の前方に他車両2がいることが検出された場合、少なくとも他車両2において急ブレーキ操作がされていることを含む危険回避支援条件が成立したら、危険回避支援手段18,19により危険回避操作を支援する危険回避支援制御手段を備える。
(もっと読む)
車両盗難防止制御装置

【課題】車外からの指令に基づいて安全に車両を停止させられる車両盗難防止制御装置を提供する。
【解決手段】車外からの外部停車要求が出されると、それに基づいて車両を停止させる。そして、車両を停止させる際に、所定の減速度、具体的には一定の基準減速度で停止させるようにする。このように、一定の基準減速度で車両を停止することで、急停車させたりすることなく安全に車両を停止させることが可能となる。
(もっと読む)
隊列走行制御装置
【課題】製造コストの増加を抑えつつ、先頭車両におけるフルブレーキ制動時の隊列走行の安定化を図ることができる隊列走行制御装置を提供することを目的としている。
【解決手段】手動又は自動運転される先頭車両1aに後続車両1bを自動追従させる隊列走行制御装置において、前走車両1aにおけるブレーキチャンバ32に加圧される最大エア圧よりも、自車両1bにおけるブレーキチャンバ32に加圧される最大エア圧を高い値に設定する調圧弁(比例制御弁)34aと、調圧弁34aを迂回するバイパス通路34eと、を備えたエアブレーキ手段(エアブレーキシステム)20a,20bと、隊列走行時、調圧弁34aを介してエアをブレーキチャンバ32に供給し、非隊列走行時、バイパス通路34eを介してエアをブレーキチャンバ32に供給するように切り替える隊列走行制御手段(統合コントローラ)10と、を備えた。
(もっと読む)
車両運転支援装置
【課題】ドライバーの運転操作の経年的な衰えを検出し、検出した衰えに応じた車両運転の支援を行う。
【解決手段】ドライバーの年齢別およびブレーキ操作開始時の車速別に、車両のブレーキ操作開始から車両停止までの期間における、車両の減速挙動を表す減速挙動データ(制動距離、減速度の標準偏差)を、減速時学習データとして記録し、当該減速時学習データが記録された後、車両のブレーキ操作開始時(ステップ210)に、減速時学習データ中の最新の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、学習データ中の最新よりも過去の期間における減速挙動データのうち現在の車速に相当する減速挙動データと、を比較し(ステップ220)、その比較結果に基づいて、ドライバーの運転能力が所定基準以上に衰えているか否かを判定し(ステップ230、240)、判定結果に応じて制動力を変化させる。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
車両制御装置
【課題】より適切な自車の減速を行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御において先行車100が減速した際に、先行車100の減速前の先行車100と自車1との車間時間が経過するまでに、取得した走行情報における先行車100の減速度と同じ大きさの減速度を自車1に発生させる。これにより、先行車100の減速中に先行車100に追突することなく、自車1を減速させることができる。また、車間時間が経過するまでに先行車100の減速度と同じ大きさの減速度を自車1に発生させることによって減速を行うので、必要以上に減速を行わないので、自車1の後方に他の車両が走行している場合でも、後続車に対する影響を低減することができる。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
車両運動制御装置
【課題】車両に横運動が発生していない状態においても、ドライバフィーリングよく車両を加減速する車両運動制御装置を提供する。
【解決手段】車両運動制御装置において、自車両前方のカーブ形状を取得するカーブ形状取得手段と、自車両の位置を取得する自車位置取得手段と、そのカーブ形状及びその自車両の位置に基づいて、車両に発生させる前後加速度指令値を演算する車両運動制御演算手段と、を有し、車両運動制御演算手段は、自車両がカーブ前からカーブ進入し、カーブ曲率が一定、もしくは最大になる地点まで走行する際に、複数の異なる負の前後加速度指令値を演算する。
(もっと読む)
車両運転支援装置
【課題】交差点に進入しようとする車両の運転者の操作を尊重し運転者による操作を妨げないようにする車両運転支援装置を提供する。
【解決手段】交差点60での一時停止見落とし等を原因とする出会い頭シーン等での事故発生シーンを想定すると、一般に、非優先車両12nは車速Vが低く、優先車両12pは車速Vが高いことが推定される。自車12が優先車両(優先側車両)12pで、車速Vが所定値(例えば、20[km])より低い場合には予圧をかけ車速Vが所定値より高い場合では予圧を少なく(ゼロを含む)することで、的確なブレーキ予圧を付与することができる。
(もっと読む)
衝突被害軽減装置、及びその方法
【課題】交差点における停止線で停止している自車両に後続車両が追突するときに、交差車線、或いは横断歩道に飛び出してしまう可能性を可能な限り低くし、且つ、上述した追突の被害を可能な限り低くできる衝突被害軽減装置、及びその方法を提供する。
【解決手段】後続車両に追突されたときの被害を自車両の制動力を制御して軽減する衝突被害軽減装置であって、自車両が追突されたときに生じるエネルギーを推定する推定手段と、交差点において停車している自車両から予め定められた停止位置までの距離を測定する測定手段と、エネルギーと停止位置までの距離とに基づいて自車両の制動力を予め制御する制動力制御手段とを備える。
(もっと読む)
走行制御装置
【課題】自車両と直前車両との車間距離を正確に制御することができる走行制御装置を提供する。
【解決手段】走行制御装置は、車間距離を短くする要求があった場合に、隊列の先頭車両が一定の加速度以上で加速中または加速予定であるときは、自車両と直前車両との車間距離を短くする制御を開始せずに待機し、先頭車両が一定の加速度以上で加速中または加速予定でないときは、自車両と直前車両との車間距離を短くする制御を開始する。また、走行制御装置は、車間距離を長くする要求があった場合に、隊列の先頭車両が一定の減速度以下で減速中または減速予定であるときは、自車両と直前車両との車間距離を長くする制御を開始せずに待機し、先頭車両が一定の減速度以下で減速中または減速予定でないときは、自車両と直前車両との車間距離を長くする制御を開始する。
(もっと読む)
1 - 20 / 133
[ Back to top ]